 目標檢測:Faster RCNN算法詳解
目標檢測:Faster RCNN算法詳解
本文是繼RCNN[1],fast RCNN[2]之后,目標檢測界的領軍人物Ross Girshick團隊在2015年的又一力作。簡單網絡目標檢測速度達到17fps,在PASCAL VOC上準確率為59.9%;復雜網絡達到5fps,準確率78.8%。
作者在github上給出了基于matlab和python的源碼。對Region CNN算法不了解的同學,請先參看這兩篇文章:《RCNN算法詳解》,《fast RCNN算法詳解》。
思想
從RCNN到fast RCNN,再到本文的faster RCNN,目標檢測的四個基本步驟(候選區域生成,特征提取,分類,位置精修)終于被統一到一個深度網絡框架之內。所有計算沒有重復,完全在GPU中完成,大大提高了運行速度。
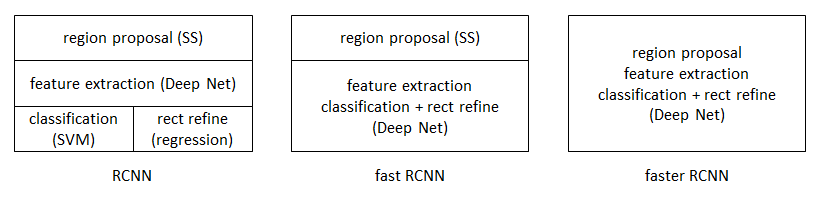
faster RCNN可以簡單地看做“區域生成網絡+fast RCNN“的系統,用區域生成網絡代替fast RCNN中的Selective Search方法。本篇論文著重解決了這個系統中的三個問題:
如何設計區域生成網絡
如何訓練區域生成網絡
如何讓區域生成網絡和fast RCNN網絡共享特征提取網絡
區域生成網絡:結構
基本設想是:在提取好的特征圖上,對所有可能的候選框進行判別。由于后續還有位置精修步驟,所以候選框實際比較稀疏。
特征提取
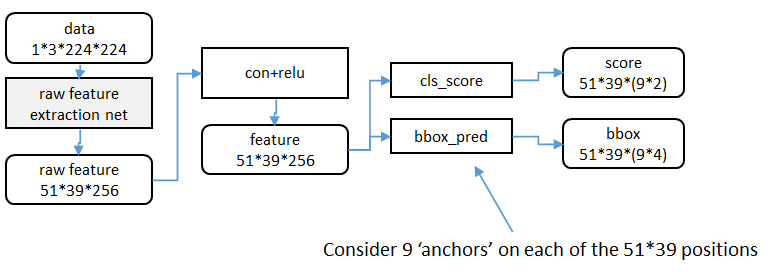
原始特征提取(上圖灰色方框)包含若干層conv+relu,直接套用ImageNet上常見的分類網絡即可。本文試驗了兩種網絡:5層的ZF[3],16層的VGG-16[[^-4]],具體結構不再贅述。
額外添加一個conv+relu層,輸出5139256維特征(feature)。
候選區域(anchor)
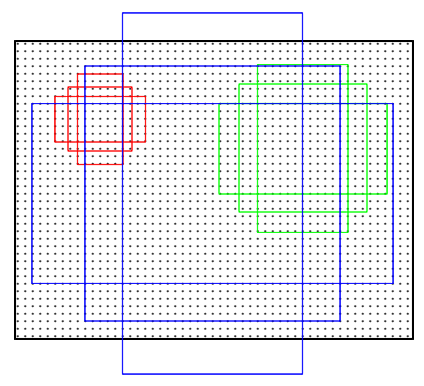
特征可以看做一個尺度5139的256通道圖像,對于該圖像的每一個位置,考慮9個可能的候選窗口:三種面積{ 12 8 2 , 25 6 2 , 51 2 2 } × \{128^2, 256^2, 512^2 \}\times{1282,2562,5122}×三種比例{ 1 : 1 , 1 : 2 , 2 : 1 } \{ 1:1, 1:2, 2:1\}{1:1,1:2,2:1}。這些候選窗口稱為anchors。下圖示出5139個anchor中心,以及9種anchor示例。
在整個faster RCNN算法中,有三種尺度。
原圖尺度:原始輸入的大小。不受任何限制,不影響性能。
歸一化尺度:輸入特征提取網絡的大小,在測試時設置,源碼中opts.test_scale=600。anchor在這個尺度上設定。這個參數和anchor的相對大小決定了想要檢測的目標范圍。
網絡輸入尺度:輸入特征檢測網絡的大小,在訓練時設置,源碼中為224*224。
窗口分類和位置精修
分類層(cls_score)輸出每一個位置上,9個anchor屬于前景和背景的概率;窗口回歸層(bbox_pred)輸出每一個位置上,9個anchor對應窗口應該平移縮放的參數。
對于每一個位置來說,分類層從256維特征中輸出屬于前景和背景的概率;窗口回歸層從256維特征中輸出4個平移縮放參數。
就局部來說,這兩層是全連接網絡;就全局來說,由于網絡在所有位置(共51*39個)的參數相同,所以實際用尺寸為1×1的卷積網絡實現。
實際代碼中,將51399個候選位置根據得分排序,選擇最高的一部分,再經過Non-Maximum Suppression獲得2000個候選結果。之后才送入分類器和回歸器。
所以Faster-RCNN和RCNN, Fast-RCNN一樣,屬于2-stage的檢測算法。
區域生成網絡:訓練
樣本
考察訓練集中的每張圖像:
a. 對每個標定的真值候選區域,與其重疊比例最大的anchor記為前景樣本
b. 對a)剩余的anchor,如果其與某個標定重疊比例大于0.7,記為前景樣本;如果其與任意一個標定的重疊比例都小于0.3,記為背景樣本
c. 對a),b)剩余的anchor,棄去不用。
d. 跨越圖像邊界的anchor棄去不用
代價函數
同時最小化兩種代價:
a. 分類誤差
b. 前景樣本的窗口位置偏差
具體參看fast RCNN中的“分類與位置調整”段落。
超參數
原始特征提取網絡使用ImageNet的分類樣本初始化,其余新增層隨機初始化。
每個mini-batch包含從一張圖像中提取的256個anchor,前景背景樣本1:1.
前60K迭代,學習率0.001,后20K迭代,學習率0.0001。
momentum設置為0.9,weight decay設置為0.0005。[4]
共享特征
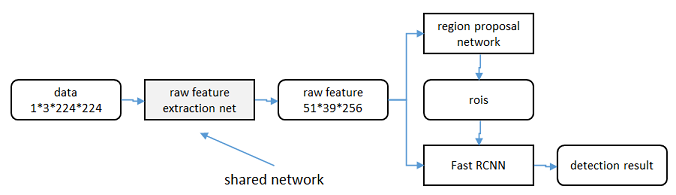
區域生成網絡(RPN)和fast RCNN都需要一個原始特征提取網絡(下圖灰色方框)。這個網絡使用ImageNet的分類庫得到初始參數W 0 W_0W0?,但要如何精調參數,使其同時滿足兩方的需求呢?本文講解了三種方法。
輪流訓練
a. 從W 0 W_0W0?開始,訓練RPN。用RPN提取訓練集上的候選區域
b. 從W 0 W_0W0?開始,用候選區域訓練Fast RCNN,參數記為W 1 W_1W1?
c. 從W 1 W_1W1?開始,訓練RPN…
具體操作時,僅執行兩次迭代,并在訓練時凍結了部分層。論文中的實驗使用此方法。
如Ross Girshick在ICCV 15年的講座Training R-CNNs of various velocities中所述,采用此方法沒有什么根本原因,主要是因為”實現問題,以及截稿日期“。
近似聯合訓練
直接在上圖結構上訓練。在backward計算梯度時,把提取的ROI區域當做固定值看待;在backward更新參數時,來自RPN和來自Fast RCNN的增量合并輸入原始特征提取層。
此方法和前方法效果類似,但能將訓練時間減少20%-25%。公布的python代碼中包含此方法。
聯合訓練
直接在上圖結構上訓練。但在backward計算梯度時,要考慮ROI區域的變化的影響。推導超出本文范疇,請參看15年NIP論文[5]。
實驗
除了開篇提到的基本性能外,還有一些值得注意的結論
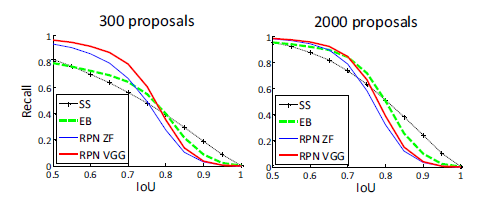
與Selective Search方法(黑)相比,當每張圖生成的候選區域從2000減少到300時,本文RPN方法(紅藍)的召回率下降不大。說明RPN方法的目的性更明確。
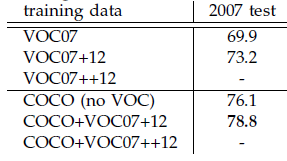
使用更大的Microsoft COCO庫[6]訓練,直接在PASCAL VOC上測試,準確率提升6%。說明faster RCNN遷移性良好,沒有over fitting。
Girshick, Ross, et al. “Rich feature hierarchies for accurate object detection and semantic segmentation.” Proceedings of the IEEE conference on computer vision and pattern recognition. 2014. ??
Girshick, Ross. “Fast r-cnn.” Proceedings of the IEEE International Conference on Computer Vision. 2015. ??
M. D. Zeiler and R. Fergus, “Visualizing and understanding convolutional neural networks,” in European Conference on Computer Vision (ECCV), 2014. ??
learning rate-控制增量和梯度之間的關系;momentum-保持前次迭代的增量;weight decay-每次迭代縮小參數,相當于正則化。 ??
Jaderberg et al. “Spatial Transformer Networks”
NIPS 2015 ??
30萬+圖像,80類檢測庫。
責任編輯:xj
-
目標檢測
+關注
關注
0文章
209瀏覽量
15605 -
深度學習
+關注
關注
73文章
5500瀏覽量
121113
發布評論請先 登錄
相關推薦
AI模型部署邊緣設備的奇妙之旅:目標檢測模型
在樹莓派上部署YOLOv5進行動物目標檢測的完整流程

在目標檢測中大物體的重要性

圖像分割與目標檢測的區別是什么
目標檢測與識別技術有哪些
目標檢測與識別技術的關系是什么
目標檢測識別主要應用于哪些方面
慧視小目標識別算法 解決目標檢測中的老大難問題

機器學習算法原理詳解
人員跌倒識別檢測算法

深入了解目標檢測深度學習算法的技術細節
多目標跟蹤算法總結歸納

AI驅動的雷達目標檢測:前沿技術與實現策略

激光SLAM:Faster-Lio算法編譯與測試






 工商網監
工商網監
評論