 新松機器人慣性導航AGV搬運系統方案實例
新松機器人慣性導航AGV搬運系統方案實例
慣性導航系統(INS,以下簡稱慣導)是一種不依賴于外部信息、不易受到干擾的自主式導航系統。慣導通過測量載體在慣性參考系的加速度,自動進行積分運算,獲得載體的瞬時速度和瞬時位置數據,且把它變換到導航坐標系中,從而得到在導航坐標系中的速度、偏航角和位置等信息。其優勢在于給定了初始條件后,不需要外部參照就可確定當前位置、方向及速度。適用于各種復雜地理環境和外界干擾下的精確定位和定向,且能不斷測量位置的變化,精確保持動態姿態基準。
隨著經濟建設對科學技術需要的提高,以及人們對慣性技術了解的不斷普及和深入,慣性技術的應用領域已逐步從軍用擴展到民用,從導航/制導擴展到穩定/控制,并正在努力開發具有市場競爭力的新技術和新產品。
以下是新松機器人自動化股份有限公司設計的慣導AGV在某大型電極箔公司運輸電極箔的原料、半成品及成品的實例。電極箔是鋁電解電容器制造的關鍵原材料,由于電子產業的迅速發展,尤其是通信產品、計算機、家電等整機產品市場的急劇擴大,對鋁電極箔產業的發展起了推波助瀾的作用。同時由于鋁電解電容器的小型化、高性能化、片式化的要求越來越迫切,對電極箔制造業的技術和質量提出了很高的要求,同時也對高效、正確的倉儲管理提出了很高的需求。
物料的裝卸搬運是物流過程中發生頻率高,耗用時間長,所需費用大的作業活動。為了降低成本并提高效率,自動搬運技術的實施勢在必行,因此受到越來越多的關注。在眾多的搬運技術中,因為 AGV(Automatic Guided Vehicle)的優越性,使其成為實現物料自動搬運的最佳解決方案。AGV也是當今柔性制造系統和自動化倉儲系統中物流運輸的有效手段,是物流領域中首推的簡單有效的自動物料運輸方式。因此我們采用AGV作為此項目的載體配合整個物流系統實現貨物的傳輸和運送。AGV的應用實現了其原料、半成品、成品倉儲管理的自動化、智能化、信息化,提高了工作效率,降低了差錯率,同時也使電極箔生產作業流程的綜合自動化水平邁上一個新的臺階。
由于此公司現場環線4000多米長,且交叉點較多,鋪設磁條施工難度較大,且可能產生相近、相交軌跡之間的干涉,因此我們為降低成本,便于施工,基于性價比考慮,采用地面相隔一定距離預埋磁釘,進行慣性導航控制,增強AGV在復雜環境條件下的抗干擾能力,保證AGV在復雜軌跡行走時有較高的精度定位。
1、工作流程
在整體布局中,各工藝環線上按照工藝需要,通過預埋磁釘布置相應的上下料站點,每個站點由AGV自動進行上下料工作。
在站點上通過手持終端對AGV下達空托盤輸送指令。任務管理系統通過網絡與AGV輸送系統連接,根據各工位“要料”情況發指令給AGV輸送系統,由AGV系統自動實現指定產品在庫房與指定工位間及各工位間的運送。無任務的AGV將在指定地點進行充電任務并等待輸送指令。
2、AGV基本參數技術要求
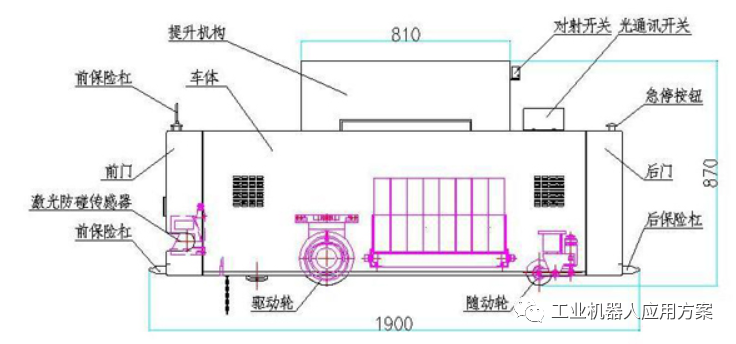
AGV的機械結構由三部分組成:車體,驅動裝置和提升機構組成。根據現場托盤情況,承載能力800KG,工作狀態,進行校核計算,得如下參數:
-AGV驅動裝置:采用雙驅動輪差動形式
-提升機構:采用凸輪機構,安裝內導向,保證提升機構直線上下,動作平穩
-提升高度:100mm
-AGV導航精度為±10mm;停車位置精度為±5mm。
-AGV最大速度為60m/min
AGV設有前后接觸式保險杠和前置非接觸式激光防碰傳感器,當AGV運行時,前方一定距離內發現障礙物,AGV可減速停車,保證AGV及周邊人員設備的安全。
-車體尺寸:1900×850×870(mm)。
-AGV負載能力:》 800KG。
-AGV使用48V/100AH快速充電電池
-通訊方式為:無線局域網。
-導航方式為:慣性導航。
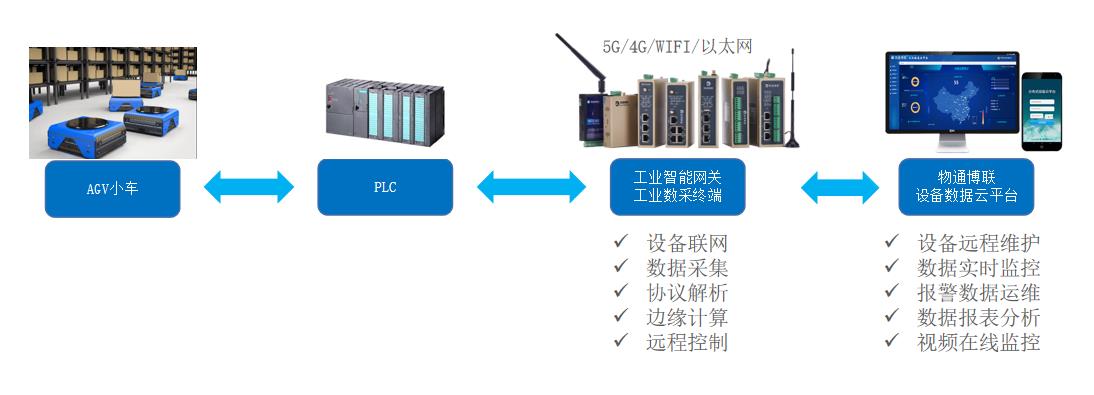
3、AGV電氣系統的構成
AGV主要由車載控制器、伺服驅動系統、慣導系統、安全系統、供電系統、通訊系統和手動維護系統等部分構成。實現了AGV控制器的通用性與模塊化,各功能模塊性能穩定可靠且分工明確,即保證了AGV整體性能的靈活配置,又便于不同系統功能的擴充與維護。
慣導傳感器的小誤差會隨時間累積成大誤差,其誤差大體上與時間成正比,因此需要不斷進行修正。新松慣導AGV是多傳感器數據融合的產物,包括高精度磁導航傳感器、陀螺儀傳感器、驅動輪碼盤傳感器,以及RFID傳感器等。在工作過程中,我們采用RFID配合AGV車體及時進行糾偏,保證慣導系統的精度及可靠性,從而保證AGV系統按軌跡運行。RFID同時作為站點識別的載體,使AGV可以隨時自動上線,不用人工輸入站點的號碼,在上線站點比較多的應用現場,為操作人員提供了便利,避免了人工輸入錯誤的情況。
4、 AGVS系統構成
電氣控制系統是物流系統中設備執行的控制核心,包含設備控制層和監控層。向上聯接物流系統的調度計算機,接受物料的輸送指令;向下聯接輸送設備實現底層輸送設備的驅動、輸送物料的檢測與識別;完成物料輸送及過程控制信息的傳遞。此外還提供內容豐富、形象生動的人機界面、安全保護措施和多種操作模式,輔助工作人員進行設備操作和維護。
AGV通過控制臺負責與立庫管理計算機交換信息,根據所要輸送鋁箔托盤的信息生成AGV的運行任務,同時解決運行中多AGV之間的避碰問題。AGV控制臺在調度管理過程中將AGV系統的狀態反饋給倉庫的中心控制管理系統。AGV控制臺和各AGV之間組成無線局域網。AGV與控制臺之間采用無線局域網進行信息交換。通過多個無線接入點的組合,覆蓋AGV運行的區域,使AGV在跨越不同的區域時實現自動漫游,實現無縫連接。
由于采用集中控制的方式,控制臺將成為AGVS系統的核心。它與生產調度管理計算機系統留有接口,可以接受調度命令和報告AGV的運行情況。控制臺應滿足工業現場環境要求,有足夠的運算速度和管理能力。控制臺主要功能包括通訊管理、AGV運行狀態、數據采集和運行狀態顯示。控制臺在實時調度在線AGV的同時將在屏幕上顯示系統工作狀態,包括在線AGV的數量、位置(包括AGV處于的地標位置)狀態、已完成的裝配數量等。控制臺負責AGV運行中的交通管理。保證運行中的AGV與AGV間不發生碰撞和AGV追尾等事故。控制臺將對進入系統和退出系統的AGV進行管理,以保證系統安全運行。
責任編輯:xj
原文標題:新松慣性導航AGV搬運系統方案
文章出處:【微信公眾號:工業機器人應用方案】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
211文章
28380瀏覽量
206919 -
導航
+關注
關注
7文章
528瀏覽量
42405 -
AGV
+關注
關注
27文章
1302瀏覽量
41074 -
新松
+關注
關注
3文章
124瀏覽量
13827
原文標題:新松慣性導航AGV搬運系統方案
文章出處:【微信號:jiqirenyingyong,微信公眾號:jiqirenyingyong】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

智能時代小巨人:地牛AGV搬運機器人

復合機器人倉庫搬運方案

智慧物流AGV機器人遠程監控系統解決方案
M-G370/M-G365可應用于AGV搬運機器人,AGV小車的慣性測量單元IMU

AGV小車上的慣性導航模塊運用——SGPM02

人工 VS AGV無人搬運機器人,AGV賦能中國智能制造


小身板 大能量,凌科電氣工業級連接器助力AGV搬運機器人顯身手!
YM20包膠款工業級連接器解決AGV搬運機器人電源連接需求






 工商網監
工商網監
評論