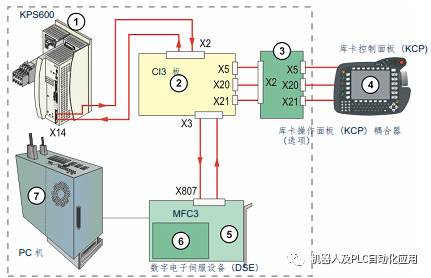
 KUKA C1-C2機器人工作原理
KUKA C1-C2機器人工作原理
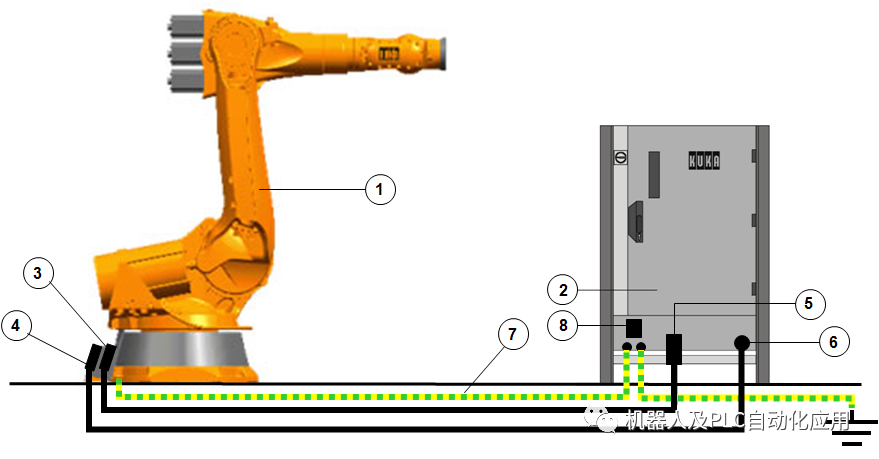
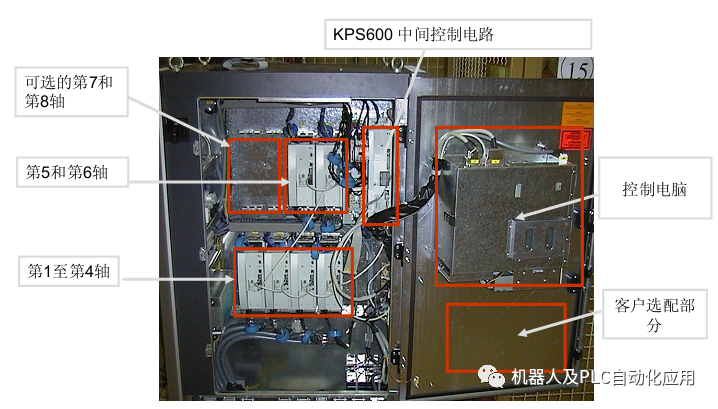
| 1 | 機器人 | 5 | 馬達電纜 X20 |
| 2 | 控制柜 | 6 | 數據電纜 X21 |
| 3 | 馬達電纜 X30 | 7 | 接地電纜 16 mm2 |
| 4 | 數據電纜 X31 | 8 | 電源 400 V 3~ X1 |
主要內部安全監視:
電機監視: 電機通過在電機繞組中的溫度探頭進行過載保護.
電壓監視: 如果過高或過低的電壓超出了半導體放大器的允許的范圍,將導致伺服驅動模塊的關斷.
溫度監視: 控制柜的溫度(內部溫度)受到監視.溫度超出范圍將導致控制部分的關斷.
點動(自動中斷功能):
所有工作程序都能夠在降低的速度條件下以手動的,測試運行方式來完成動作.工作程序只有在按住”START”鍵的情況下才能運行.一旦放開”start”鍵,機器人就停止動作.只有通過重新按”start”鍵才能繼續運行工作程序.
關閉機器人控制系統
在關閉時,機器人保持停止并且機器人控制系統關機。機器人控制系統自動備份數據。
KRL 庫卡機器人編程語言(KUKA Robot Language)
KSS 庫卡系統軟件
VxWorks 實時操作系統
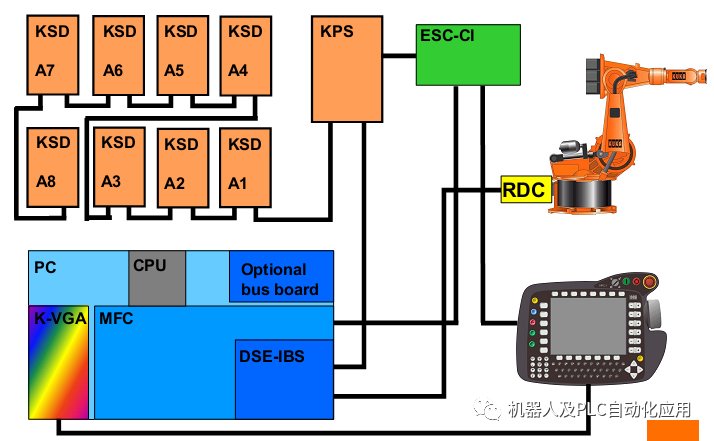
電子安全回路(ESC)的安全邏輯系統
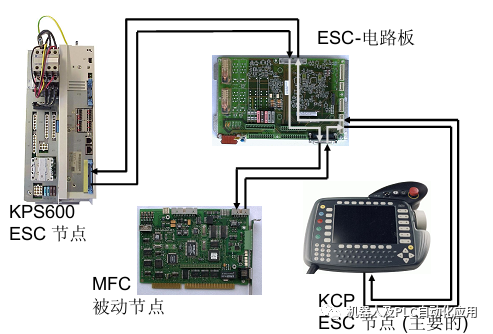
安全邏輯電路 ESC (Electronic Safety Circuit ,電子安全回路)是一種雙信道、支持中央處理器的安全系統。它可對所有連接上的、與安全有關的元件進行持久監控。安全回路發生故障或中斷時,驅動裝置供電電源將關閉,由此可使機器人系統停止。
電子安全回路(ESC)系統由以下元件組成:
? CI3 板
? 庫卡控制面板(KCP)(主設備)
? KPS600
? MFC(被動式節點)
下列輸入端可監控安全邏輯電路(ESC) :
? 局部緊急關斷
? 外部緊急關斷
? 操作人員防護裝置
? 確認
? 驅動裝置關閉
? 驅動裝置接通
? 運行方式
? 高級控制輸入端
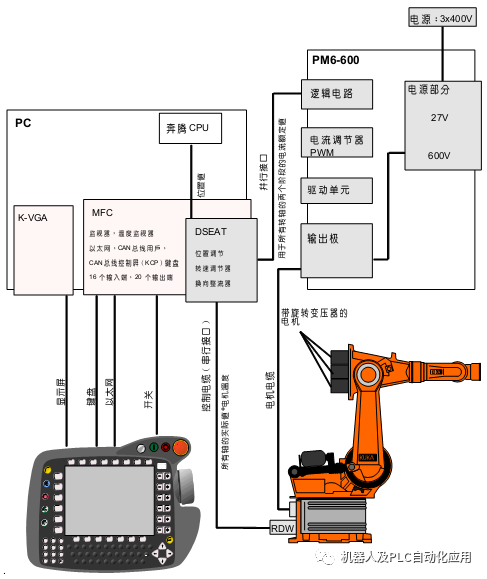
處理器以IPO時鐘周期(目前C1/C2/C4都是12ms)為每臺電機(從而為每根軸)計算一個新的位置值。各位置值將傳送給DSEAT卡(插接在多功能卡(MFC)上)上的 第2個處理器。這個處理器將借助于一個專門的軟件進行位置調節,轉速調節和換向整流(相對旋轉磁場的產生有相位移)。從而使調節過程數字化。
驅動模塊:
數字式電流額定值將由DSEAT通過一個并行接口以125US的周期傳遞給驅動模塊PM6-600。該數字式傳遞不會受外部干擾。所以,采用廉價的扁平電纜用作傳遞媒介足以。
電流額定值將在驅動模塊中得到模擬轉換并且通過電流調節器和脈寬調制器進入輸出極。電流調節器采用的模擬電路,因為它相對比較容易實現,并且僅在極少數情況下必須對調節參數進行配合。
中間電路電壓:
輸出極的中間電路電壓將直接(不通過變壓器)通過電網電壓(3X400V)的整流而產生.因此,中間電壓在空載時為565V.所以,各輸出極和電機必須按照600V的電壓設計.
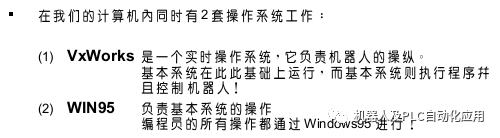
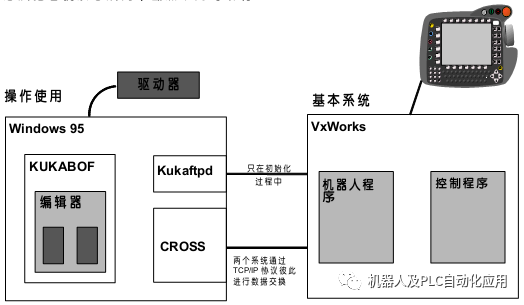
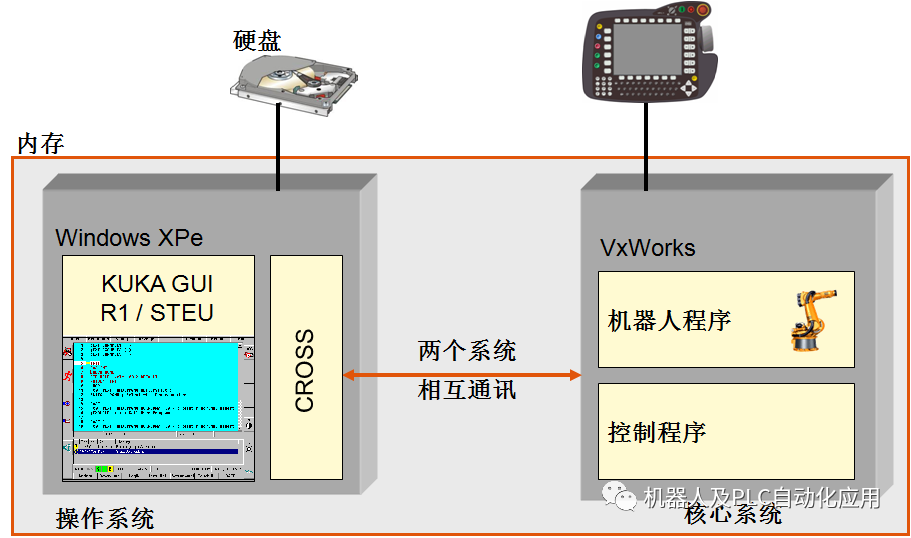
在我們的計算機內同時有2套操作系統工作:
VXWORKS :是一個實時操作系統,它負責機器人的操縱.
WINDOWS系統: 負責基本系統的操作
編程員的所有操作都通過WINDOWS系統進行!
接通電源的過程:
在接通電源時,操作系統95視窗啟動,并且通過AUTOSTART啟動程序STARTUP.bat(在Autostart內用“startl”表示),該程序按照給定的順序(重要)執行下列程序:
-Kukaftpd.exe
-Upvxwin.exe
-Kukadb.exe
-Cross.exe
-Kukabof.exe
KUKA C1
KUKA C2
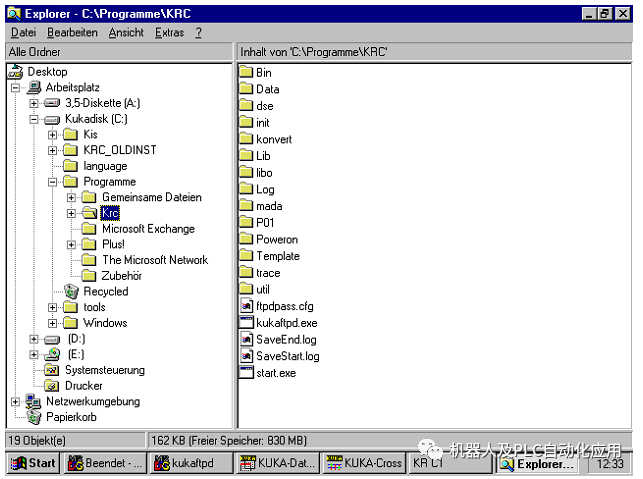
Kukaftpd.exe
目錄:C: /Programme/Krc
該文件傳輸程序允許基本系統對PC機的硬盤進行存取操作。在開機啟動過程中,基本系統將由此讀入初始化等文件。Trace功能也同樣通過該服務程序對硬盤進行存取。程序啟動之后,它保持激活狀態并且等候同其FTP-Client之間的聯系。用遞交參數“-d”調用程序將使得輸出窗口的命令同時可見地被記錄下來。
這個文件傳輸程序將在開機啟動過程中被用到。
UPVXWIN.EXE
目錄:C:/Programme/krc/bin
這個程序相應地預留儲蓄空間,裝載和起動基本系統。遞交參數表明待預留的儲存空間以及基本系統文件的名字。
調用句法:
32MB RAM:UPVXWIN.EXE-S6144-mD0000-D4000-I20000-P2560 vxworks.st用遞交參數“-x”調用upvxwin將重新空出預留的儲存空間。
KUKADB.EXE 存取提示數據庫
CROSS.exe
Windows包括操作使用,即把指令傳送給基本系統。在這里使用的程序是cross.exe
PHGSIMU.exe
模擬KCP。這個程序只用在Office(辦公室)版本中。
KUKABof.exe
在控制部分的開機啟動過程之后,這個程序占用整個屏幕。
在程序的標題行中沒有WINDOWS下常見的按鈕xxx。這樣,操作者通過它既不能結束程序,也不能將它縮小成圖符。由于也不能使用windows啟動鍵和windows任務條,所以不能轉換至windows。
在安裝完軟件之后以后可以在硬盤上見到如下目錄結構。
KUKA C1
KUKA C2
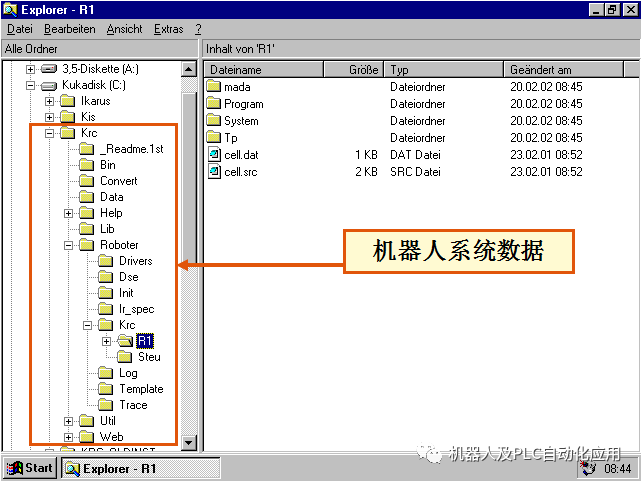
| $congfig.dat | Krc:/R1/system | 帶常規配置數據的系統數據表 |
| Sps.sub | 提交SPS軟件程序文件 | |
| Bas.src | 用于初始化等場合的基本軟件包(坐標參數) | |
| Select.dat/select.src | 執行宏程序和子程序的分配程序 | |
| Vw.src | 大眾公司標準程序包 |
| WEAV_DEF.src | KRC:/R1/system | 用于擺動移動的程序 |
| $machine.dat | KRC:/R1/made | 帶系統變量的系統數據表,用于控制部分和機器人的配合。 |
| $operate.src | 系統文件,包括程序數據和機器人狀態數據 | |
| $robcor.dat | 系統數據表,包括用于機器人動態模型數據 | |
| MACHIINE.upg/robcor.upg | 升級文件 |
| CELL.src | KRC: /R1/folgen | 通過中央SPS控制機器人的程序 |
| MAKROSAW.SRC | Krc:/R1/makros | 用于語句選擇的程序 |
| MAKROSPS .SRC | 用于獨立的SPS程序 |
|
VW_user.dat VW_user.src VW_user_r.dat VW_user_r.src VW_user_s.dat VW_user_s.src |
KRC:/R1/VW_USER | 考慮到同老版本的兼容性而設立,大眾公司專用專家編程模塊。 |
責任編輯:lq
-
機器人
+關注
關注
211文章
28468瀏覽量
207359 -
電機
+關注
關注
142文章
9028瀏覽量
145670 -
控制柜
+關注
關注
4文章
163瀏覽量
15133
原文標題:KUKA C1-C2機器人工作原理
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】+數據在具身人工智能中的價值
復合機器人在3c電子行業的應用
語音識別機器人的工作原理
Ex2-C6防爆掛軌巡檢機器人:化工安全巡檢的得力助手

abb機器人工具坐標系問題
碼垛機器人的組成和工作原理
Ex1-C6防爆巡檢機器人——工業安全的守護者


I2C總線協議的工作原理和尋址格式
機器人是如何工作的 機器人工作原理解析
焊接機器人工作站由哪些部分構成?各有什么作用?
焊接機器人的工作原理與優勢分析






 工商網監
工商網監
評論