 機器人關機后WINCC診斷畫面沒有顯示鈍化!
機器人關機后WINCC診斷畫面沒有顯示鈍化!
機器人關機后沒有急停反饋故障,原因是機器人在操作選擇關機時,如果網絡還處于連接狀態時會出現鈍化,但此時WINCC診斷界面不會顯示鈍化!,這是因為新的標準的以下處理會將鈍化點短接!
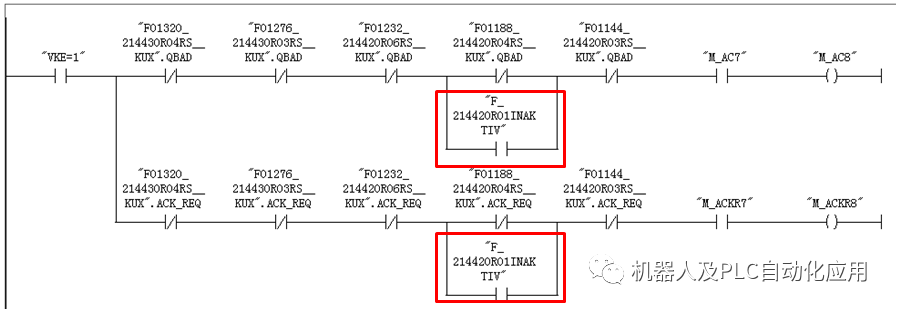

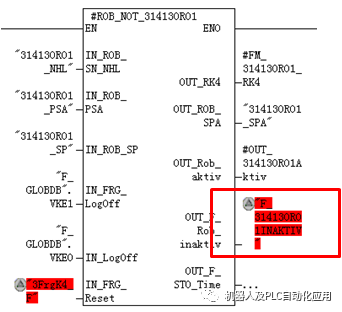
機器人安全網絡沒有激活,機器人安全網絡中斷時,“F_214420R01INAKTIV”會被常值1.
-|NOT|-- 取結果的反
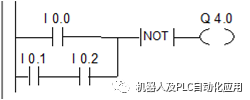
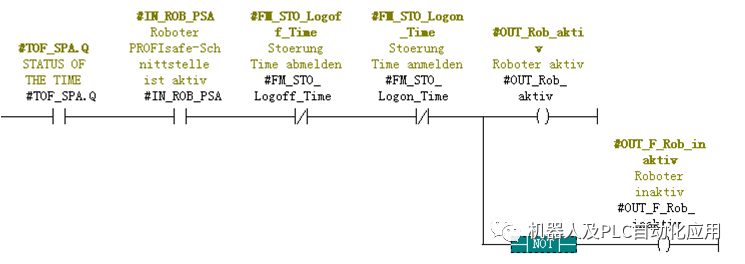
條件滿足時,輸出端Q4.0的信號狀態將是"0",
實際上這個問題已經不是一次兩次的出現并誤導其他調試人員了!
必須整改!
責任編輯:lq
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28501瀏覽量
207473 -
WinCC
+關注
關注
6文章
204瀏覽量
48027
原文標題:紀實:機器人關機后WINCC診斷畫面沒有顯示鈍化!
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主機器人
發表于 01-04 19:22
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
和方向的6軸陀螺儀
用于聲音交互的蜂鳴器
以及為魅力加分的顯示屏!
這款機器人不僅功能強大,更是一個創意平臺。無論你是使用Python編程其動作,還是通過Mind+探索可視化編程,Tillu都是
發表于 01-02 17:24
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
的局限性以及衡量大模型的關鍵指標。閱讀了該部分后,我感受到了一種前所未有的震撼,這種震撼不僅來源于技術本身的先進性,更來源于它對傳統機器人控制方式的顛覆。
傳統機器人的局限性與大模型的變革
傳統的
發表于 12-29 23:04
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
、家庭服務機器人等。具身智能機器人技術與市場的融合閉環是自主經濟中重要的發展方向之一。
具身智能機器人是一種能夠在沒有人類直接控制的情況下自主執行任務的
發表于 12-28 21:12
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》 一書由甘一鳴、俞波、萬梓燊、劉少山老師共同編寫,其封面如圖1所示。
本書共由5部分組成,其結構和內容如圖2所示。
該書可作為高校和科研機構的教材,為學生和研究人員提供系統
發表于 12-20 19:17
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
Intelligence)這一概念有了深入理解。本書開篇和大部分書籍文章一樣,都是立足宏觀角度,先把視角引申到世界經濟形勢。書中闡述具身智能機器人有望成為繼計算機、智能手機后的新一代顛覆性產品。2005-2010年
發表于 12-19 22:26
專家:10年后每個人需要兩臺機器人
,另外一臺機器人去給你做好服務。 而且對于時間節點,專家也給出了預判,樂觀的話5--10年就可以會實現。 人形機器人也被很多業界人士看好,根據GGII在2023年5月發布的數據分析報告顯示,預計到2026年全球人形
【開源項目】你準備好DIY一款功能強大的機器人了嗎?
和OLED顯示屏的組裝后,再次檢查整個電路板的功能和連接情況,確保所有組件都正常工作,并且沒有松動或損壞的情況。這樣,你的電路板就可以與機器人底盤等其他部分進行連接和集成了。
機械部件
發表于 11-08 10:53
醫療機器人有什么用
醫療機器人作為現代醫療技術與人工智能深度融合的產物,在醫療領域發揮著越來越重要的作用。它們能夠自主或協作地完成手術、診斷、治療、護理和康復等醫療任務,為醫療工作提供了強有力的支持。以下是對醫療機器人具體作用的詳細歸納:
開源項目!用ESP32做一個可愛的無用機器人
、固件燒錄等。
注意事項
制作這個機器人的材料成本比較高,接近一臺全新筆記本電腦的價格。此外,如果沒有焊接經驗,整體成本可能更高,因為還需要涉及到PCB組裝。
完成
完成后,機器人
發表于 09-03 09:34
開源項目!用ESP32做一個可愛的無用機器人
、固件燒錄等。
注意事項
制作這個機器人的材料成本比較高,接近一臺全新筆記本電腦的價格。此外,如果沒有焊接經驗,整體成本可能更高,因為還需要涉及到PCB組裝。
完成
完成后,機器人
發表于 08-30 14:50
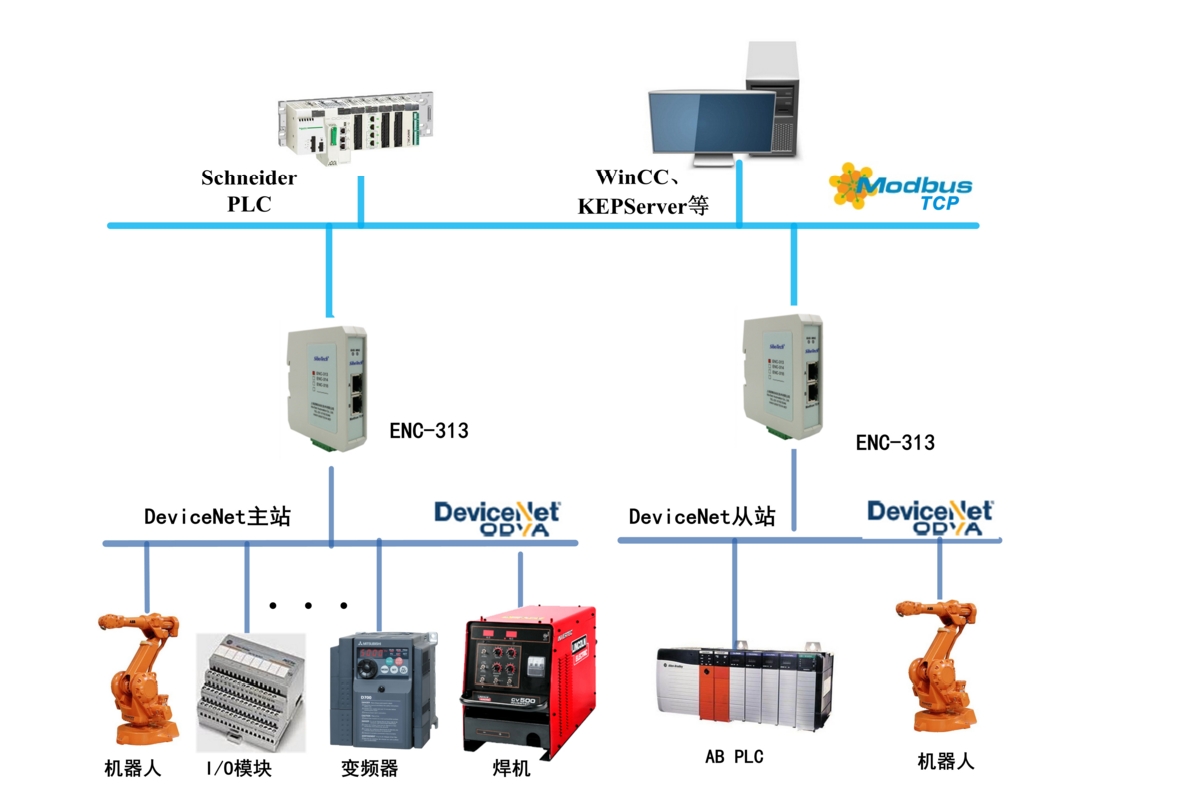
DeviceNet轉Modbus TCP網關ENC-313 讓WinCC對接上ABB機器人
應用場景 西安某汽車制造公司在舊車間整改項目中,原車間在對材料執行切割工作時使用到了ABB機器人。每個切割工作站分配六臺機器人同時工作,車間里存在多個工作站。中控室使用的上位機為WinCC
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
研發的六自由度串聯機器人進行實際的運動控制實驗。實驗證明,機器人可以實時地跟隨屏幕上顯示的物塊運動。
主要創新點
本設計難點在于如何提高視覺檢測的實時性和機器人運動控制的實時
發表于 05-29 16:17





 工商網監
工商網監
評論