 天津大學研發出3D打印軟性機器人
天津大學研發出3D打印軟性機器人
一只靈巧的尺蠖,牢牢地抓住圓形管,一伸一縮中蜿蜒前行。事實上,這只靈活的尺蠖是一款采用了天津大學研發的一種新型模塊化柔性驅動方法,用3D打印機直接“打印”出來的軟性機器人。
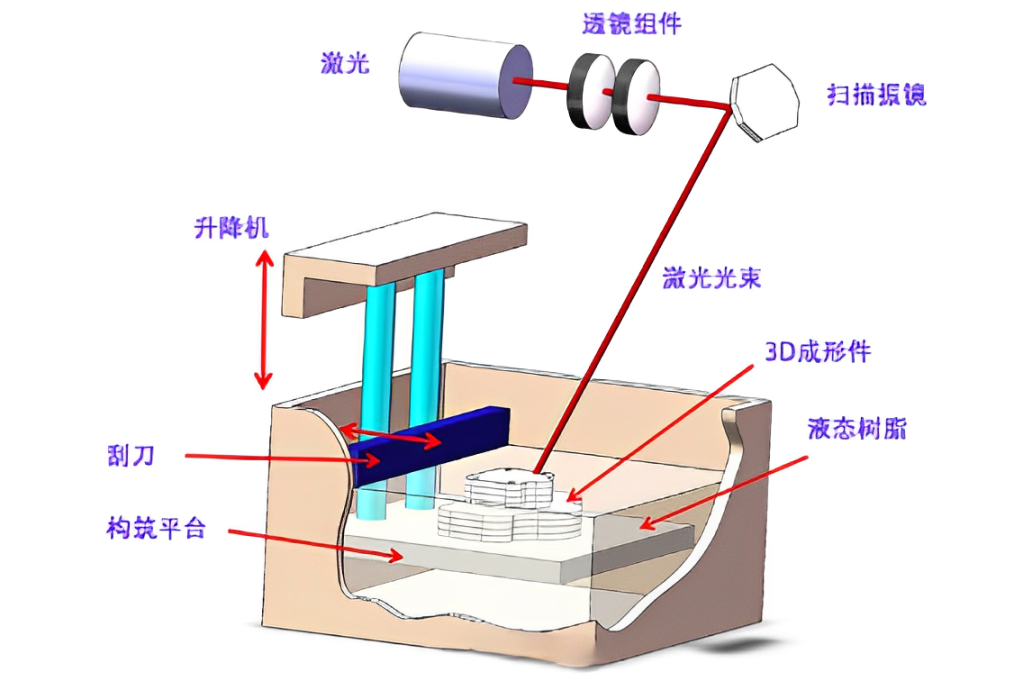
軟性機器人因其較高的柔性和對人體安全等優點,在近幾年得到了持續廣泛的關注。而3D打印的優勢就是制造復雜形體、復雜結構而且不需要后續加工,可一次成型。
打印免組裝結構,是3D打印技術制造軟性機器人近年來一個比較典型的應用。
近日,天津大學左思洋、劉建彬課題組提出了一種基于薄膜氣缸的新型模塊化柔性驅動方法,并通過根據具體應用改變排列組合方式以及合理布置連接方案,將其應用于人工肌肉和管道爬行機器人中。
該方法基于一次3D打印成型的制造技術,省掉了傳統機電設備加工制造中的裝配流程,大幅降低了驅動模塊的制造成本和周期,且具備耗氣量孝動態響應高、可靠性高、對應用場景適應性強等特點。
該成果2021年1月初在線發表在《美國電氣電子工程師學會機器人和自動化快報( IEEE Robotics and Automation Letters)》上。
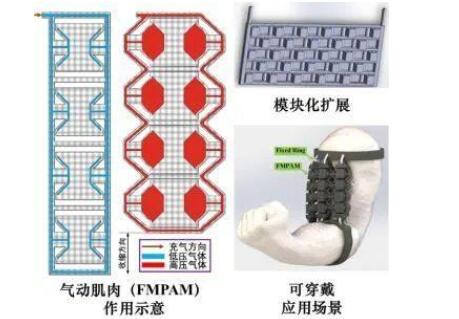
“每一個薄膜氣缸就好比人體的一小塊肌肉,或者爬蟲的一個‘節’,只不過是用熱塑性聚氨酯材料做的。”劉建彬解釋說,采用這種新型薄膜氣缸結構是團隊的“奇思妙想”。
如果把這個結構比喻成一個基本的肌肉單元,那根據不同的應用需求再對這些單元的連接方式進行排列組合和布局連接,就像是把一個個的肌肉單元連接起來形成一整塊肌肉,然后再應用于不同場景,而整塊“肌肉”的制造過程則采用了3D打印技術,一次成型。
基于此創意,課題組首先提出了一種新型氣動人工肌肉,可應用于柔性外骨骼等人機交互裝備的驅動中。氣動即以壓縮空氣為動力源,帶動機械完成伸縮或旋轉動作。
與傳統氣動人工肌肉相比,該設計最突出的特點是不會產生厚度方向的膨脹,從而避免了對人體的擠壓。
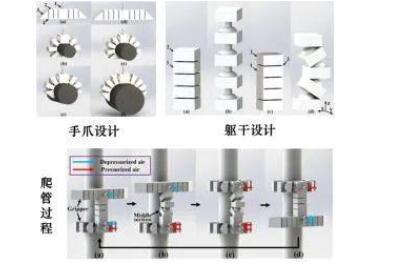
此外,課題組還提出了一種新型氣動管道爬行機器人,可應用于工業管道設施的檢查和實時監控。該管道爬行機器人采用仿生尺蠖原理,通過巧妙布置薄膜氣缸單元之間的連接,實現機器人在管道內、外壁面爬行。
柔性驅動方式的應用使該機器人能夠適應大范圍管道直徑的變化,并可應對直管、彎管、豎管、水平管以及各種角度傾斜管應用場景,同時機器人可承受自重80倍以上負載。
因為采用了氣動的方法驅動,軟性機器人只能拖著長長的氣管尾巴工作。如果將傳感器集成到設備中,也就能去掉這些氣管尾巴,使機器人更獨立精致。這也是科學家們未來的努力方向。
責任編輯:YYX
-
機器人
+關注
關注
211文章
28409瀏覽量
207025 -
3D打印
+關注
關注
26文章
3549瀏覽量
109061
發布評論請先 登錄
相關推薦

UV光固化技術在3D打印中的應用

開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
3d打印機器人外殼模型ABS材料3D打印噴漆服務-CASAIM
柔軟可拉伸的新型3D打印材料可改善可穿戴傳感應用
天津大學科學家突破人類大腦器官成功驅動機器人
上海伯東工業級3D打印機為機器人的制造工藝帶來新變革
北航成功研發微尺寸仿生機器人——昆蟲機器人
重磅| 奧比中光全新雙目系列3D相機,搭載自研芯片,為智能機器人而生

3D打印遙控氣墊船、微型步行機器人、變壓器式實驗室電源|DF創客周刊(第77期)


高精度彩色3D相機:開啟嶄新的彩色3D成像時代






 工商網監
工商網監
評論