 阻塞方式、中斷方式以及定時器捕獲功能
阻塞方式、中斷方式以及定時器捕獲功能
PWM(Pulse Width Modulation),一般指脈沖寬度調節,是利用微處理器的數字輸出來對模擬電路進行控制的一種非常有效的技術,廣泛應用在從測量、通信到功率控制與變換的許多領域中,比如LED亮度調節、電機轉速控制等。
而在某些特殊應用中,我們也需要通過測量輸入PWM的占空比,來實現不同的輸出控制,這就需要使用到PWM占空比的測量方法。這里介紹三種不同的測量方法:阻塞方式、中斷方式以及定時器捕獲功能。
1. 阻塞方式
MCU阻塞方式測量PWM占空比的原理比較簡單,也只需要使用到一個普通的IO端口(設置為輸入模式,對于51而言那就是一個普通的雙向口具體實現流程為:
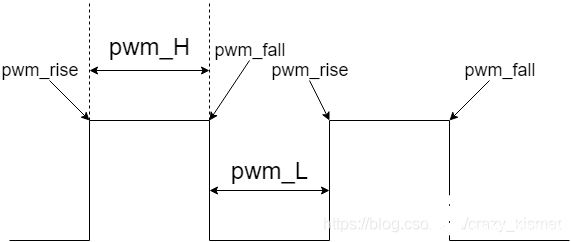
等待上升沿到來,然后開啟定時器,開始計時;
等待下降沿到來,記錄下定時器的計數值,即得到PWM的高電平時間H;
同時,清零定時器,重新開始計數;
等待上升沿到來,記錄下定時器的計數值,即得到PWM的低電平時間L;
計算得出占空比:duty = H / (H + L);
阻塞方式原理簡單,而且只需要MCU有一個定時器的資源即可實現;但采集時阻塞CPU運行,阻塞的時間和輸入PWM的周期相關,只適用于實時性較低的系統。
另外,上述流程中存在著一個嚴重的BUG,即當輸入的PWM占空比為0%或者100%時,程序會被一直阻塞,等待上升沿/下降沿的到來。所以解決方法是,在等待上升沿/下降沿的過程中,實時提取定時器的值,一旦定時時間超過1個周期的限定(一般可定義為2-3個周期時間),即退出等待,并根據端口電平判斷此時占空比為0%(低電平)或100%(高電平)。
示例代碼,僅供參考:
//獲取PWM輸入腳的電平
#define PWM_IN() xxxxxx
//定義超時時間(如2-3倍PWM周期)
#define T1_TIMEOUT xxxxxx
uint8_t PWM_Analyse(void)
{
uint8_t duty = 0xFF;
uint16_t pwm_H = 0;
uint16_t pwm_L = 0;
if (PWM_IN()) //初始為高電平,則開始等待低電平
{
TH1 = 0;
while (PWM_IN()) //等待下降沿
{
if (TH1 》= T1_TIMEOUT) //下降沿沒有到來,判定為100%占空比
{
duty = 100;
return duty;
}
}
TH1 = 0;
TL1 = 0;
while (!PWM_IN()) //等待上升沿
{
if (TH1 》= T1_TIMEOUT) //上升沿沒有到來,判定為0%占空比
{
duty = 0;
return duty;
}
}
pwm_L = (TH1 《《 8) | TL1;
TH1 = 0;
TL1 = 0;
while (PWM_IN()) //等待下降沿
{
if (TH1 》= T1_TIMEOUT) //下降沿沒有到來,判定為100%占空比
{
duty = 100;
return duty;
}
}
pwm_H = (TH1 《《 8) | TL1;
duty = pwm_H * 100 / (pwm_H + pwm_L);
return duty;
}
else //當前為低電平,則開始等待高電平
{
TH1 = 0;
while (!PWM_IN()) //等待上升沿
{
if (TH1 》= T1_TIMEOUT) //上升沿沒有到來,判定為0%占空比
{
duty = 0;
return duty;
}
}
TH1 = 0;
TL1 = 0;
while (PWM_IN()) //等待下降沿
{
if (TH1 》= T1_TIMEOUT) //下降沿沒有到來,判定為100%占空比
{
duty = 100;
return duty;
}
}
pwm_H = (TH1 《《 8) | TL1;
TH1 = 0;
TL1 = 0;
while (!PWM_IN()) //等待上升沿
{
if (TH1 》= T1_TIMEOUT) //上升沿沒有到來,判定為0%占空比
{
duty = 0;
return duty;
}
}
pwm_L = (TH1 《《 8) | TL1;
duty = pwm_H * 100 / (pwm_H + pwm_L);
return duty;
}
return 0xFF;
}
2. 中斷方式
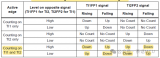
中斷方式的PWM采集原理與阻塞方式相同,只是將判定移動至外部中斷中。開啟MCU端口的外部中斷(上升沿和下降沿中斷);如果MCU外部中斷觸發不支持上升和下降沿中斷,則先開啟上升沿中斷,在中斷處理中切換中斷觸發條件。
處理方法:在中斷處理函數中,根據當前電平狀態,記錄下定時器的值,并清零定時器的值,重新開始下一輪計時。
0%和100%的處理:設定一個定時遞增的變量,同時在外部中斷中執行清零操作。若該變量超過一定值(說明外部中斷有較長時間沒有觸發),則判定為0%或100%。
uint16_t pwm_H = 0;
uint16_t pwm_L = 0;
uint16_t pwm_time_out = 0;
void EXT1_ISR(void) interrupt EXTI1_VECTOR
{
if (PWM_IN())
{
pwm_L = (TH1 《《 8) | TL1; //記錄低電平時間
TH1 = 0;
TL1 = 0;
}
else
{
pwm_H = (TH1 《《 8) | TL1; //記錄高電平時間
TH1 = 0;
TL1 = 0;
}
//該變量定時遞增(如1ms遞增1),在外部中斷中清零
//在主程序中判斷,超過一定值時認為PWM占空比為0%或100%
pwm_time_out = 0;
return;
}
注:使用中斷方式,則占空比計算不建議放在中斷中處理;同時,為了保證占空比的準確性,可以連續2-3次計算結果一致時,再確定當前占空比的結果。
3. MCU捕獲方式
采用捕獲方式的前提是MCU支持捕獲功能。當前部分廠家推出的51內核單片機,會包含一個定時器2,其擁有捕獲功能;或者采用32位單片機,一般都帶有捕獲功能。捕獲的原理很簡單,當上升沿或下降沿來臨時,MCU硬件將定時器/計數器的值保存在一個影子寄存器中,并產生捕獲中斷。
通過固定每次上升/下降沿的計數器值,相減即可分別得出高電平值和低電平值,從而計算出占空比。
下面以某顆51內核的MCU為例,提供示例代碼:
unsigned int pwm_fall = 0, pwm_rise = 0;
volatile unsigned int pwm_H;
volatile unsigned int pwm_L;
volatile unsigned char pwm_time_out;
//------------------------------------------------------------
void T2_interrupt(void) interrupt 5 //定時器2中斷;
{
if (CCCON & 0x02) //CC1中斷標志位
{
CCCON &= 0xFD; //清除中斷標志
if (PWM_IN()) //上升沿觸發
{
pwm_rise = CC1; //獲取捕獲寄存器中的值
pwm_L = pwm_rise - pwm_fall;
}
else
{
pwm_fall = CC1; //獲取捕獲寄存器中的值
pwm_H = pwm_fall - pwm_rise;
}
//該變量定時遞增(如1ms遞增1),在外部中斷中清零
//在主程序中判斷,超過一定值時認為PWM占空比為0%或100%
pwm_time_out = 0;
}
}
注: pwm_rise/pwm_fall/pwm_L/pwm_H都必須使用無符號數,否則相減時可能得到錯誤的值。
總結
方式一:任何單片機都可以實現,但是阻塞方式會使系統的實時性變差;
方式二:在使用時,需要保證外部中斷的最高優先級,不可以被其他中斷打斷,以保證其準確性;
方式三:的穩定性和準確性都較高,但是需要MCU硬件支持。
版權聲明:本文為博主原創文章,遵循 CC 4.0 BY-SA 版權協議,轉載請附上原文出處鏈接和本聲明。
本文鏈接:https://blog.csdn.net/crazy_kismet/article/details/102756206
審核編輯:何安
-
單片機
+關注
關注
6037文章
44569瀏覽量
636210 -
PWM
+關注
關注
114文章
5191瀏覽量
214178 -
占空比
+關注
關注
0文章
109瀏覽量
29115
發布評論請先 登錄
相關推薦
STM32CUBEMX(5)--自定義紅外NEC解碼,定時器TIM捕獲方式
定時器的基本組成和工作模式
使用定時器的編碼器接口模式,打開定時器的溢出中斷,當定時器上溢出和下溢出是,是否都會產生溢出中斷?
STM32的GPIO引腳能同時用作外部中斷和定時器輸入捕獲嗎?
如何實現一個軟件定時器?
使用dma的方式來傳輸定時器輸入捕獲的數據,是不是每隔100ms會觸發dma的傳輸完成中斷?
在使用一個定時器捕獲兩路PWM的頻率時,中斷函數應該如何配置呢?
如果STM32定時器外接了正交編碼器,該剩余通道是否能做PWM輸出呢?
使用STM32F407定時器中斷周期不準怎么解決?
使用555定時器的可調雙定時器電路
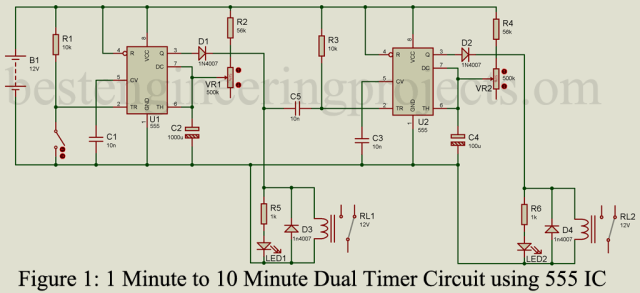
555定時器的基本功能 555定時器的工作原理及其應用
AWTK 開源串口屏開發(6) - 定時器的用法






 工商網監
工商網監
評論