") PYNQ框架下開發(fā)可重構(gòu)運動控制器
PYNQ框架下開發(fā)可重構(gòu)運動控制器
本文轉(zhuǎn)載自: PYNQ開源社區(qū)微信公眾號
這項工作是由加州州立理工大學(xué)波莫納分校、C3SR的產(chǎn)學(xué)合作課程設(shè)計項目。該項目的目標是創(chuàng)建一個通用的運動控制器,與任何運動控制系統(tǒng)或設(shè)備兼容,解決工業(yè)和開源運動控制器中的問題,同時也相對便宜,易于對創(chuàng)作者群體進行擴展。項目在PYNQ框架下開發(fā)了可重構(gòu)運動控制器,所提出的體系結(jié)構(gòu)依賴于使用S曲線算法來控制軌道上的運動,而另一個則是為了驗證概念。
1.什么是S型運動軌跡規(guī)劃
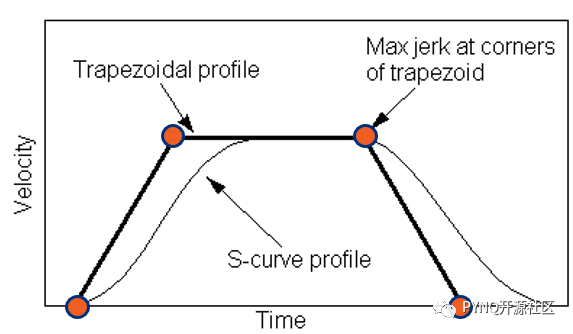
市場上發(fā)現(xiàn)的許多工業(yè)運動控制器使用具有線性加速和減速階段的梯形運動輪廓。然而,由于圖1所示不同點期間的加速度突然變化,這會導(dǎo)致沖擊運動,導(dǎo)致控制系統(tǒng)中出現(xiàn)不必要的振蕩。在 S 曲線算法中,加速和減速階段使用二階或更高多項式實現(xiàn),以減少這種沖擊運動并產(chǎn)生更平滑的運動。S曲線的階數(shù)越高,生成的運動將變得越平滑,盡管這是以額外資源為代價的。
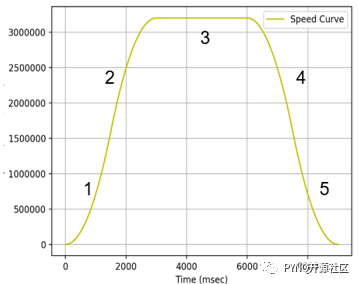
S 曲線算法本身有 5 個主要部分,如圖 2 所示。第一節(jié)和第二節(jié)包括一個增加的正加速度階段,然后是遞減的正加速度階段。第三部分是加速度為 0 且速度為最大值的穩(wěn)定狀態(tài)。第 4 節(jié)和第 5 節(jié)是前兩節(jié)的相反狀態(tài),其負加速度增加,然后是負加速度遞減,直到系統(tǒng)到達目的地。應(yīng)當指出,這些部分可以進一步細分為其他部分,這將有助于進一步理順提案。
2.實現(xiàn)
此控制器的實現(xiàn)需要三個主要組件:S-Curve 算法塊(藍色)、FIFO 塊(橙色)和包含向目標設(shè)備驅(qū)動程序生成脈沖的管理塊(黃色)。
使用此實現(xiàn)版本的FIFO塊是因為S曲線和管理塊的頻率不同。它充當一個緩沖區(qū),使S曲線與管理器中的脈沖產(chǎn)生相兼容。管理器本身是幾個功能的組合,其中最重要的是脈沖發(fā)生器或PWM,因為它將S曲線的頻率轉(zhuǎn)換為驅(qū)動器的脈沖。
3.該項目狀態(tài)和未來計劃
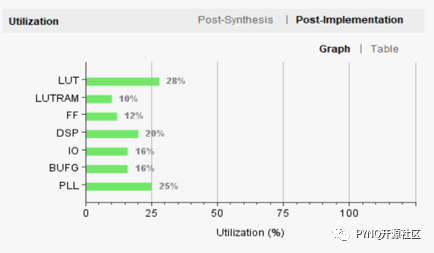
目前的項目狀態(tài)是一個工作的二階S曲線運動控制器,計劃擴展到更高的階數(shù)以及多個運動軸。在電源和資源使用方面,運動控制器僅使用約318mw,僅占用PYNQ板不到30%的資源,有很大的擴展空間。詳細步驟請點擊:
審核編輯:何安
-
開源
+關(guān)注
關(guān)注
3文章
3362瀏覽量
42527
發(fā)布評論請先 登錄
相關(guān)推薦
RTSys:自主自研、簡單易用的運動控制集成開發(fā)平臺(下) #正運動技術(shù) #運動控制器 #運動控制卡

脈沖全閉環(huán)EtherCAT運動控制器的固件升級 #正運動技術(shù) #擴展模塊 #IO模塊 #運動控制器

機器視覺運動控制一體機在智能磁驅(qū)輸送線的應(yīng)用#正運動技術(shù) #運動控制器 #正運動控制器

EtherCAT運動控制器配套用手持示教盒快速入門 #正運動技術(shù) #運動控制器 #示教盒 #正運動

EtherCAT運動控制器上位機開發(fā)之Python+Qt(三):PDO配置與SDO讀寫# 運動控制器# 控制卡

EtherCAT運動控制器上位機開發(fā)之Python+Qt(二):回零# 正運動技術(shù)# 運動控制器# 運動控制

EtherCAT運動控制器上位機之Python+Qt(一):鏈接與單軸運動# 正運動技術(shù)# 運動控制器
什么是網(wǎng)絡(luò)運動控制器?運動控制器控制伺服電機的方式有哪些?
運動控制器的種類和特點
運動控制器的控制形式有哪些
EtherCAT運動控制器Delta機械手應(yīng)用


Windows實時運動控制軟核:LOCAL高速接口測試之Labview# 正運動技術(shù)# 運動控制器# 運動控制
EtherCAT運動控制器在ROS上的應(yīng)用開發(fā)案例(上)

EtherCAT運動控制器在ROS上的應(yīng)用(上)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論