 如何把KUKA-C4的通過網絡備份到PC上?
如何把KUKA-C4的通過網絡備份到PC上?
保存在網絡上:
該操作步驟會在網絡路徑上生成一個壓縮文件。在默認情況下,這個文件名稱與機器人名稱相同。但在投入運行 > 機器人數據下也可以為此文件確定一個自己的名稱。
必須在投入運行 > 機器人數據下對用于存檔的網絡路徑進行配置。若需要用戶名和密碼才可以在該路徑上存檔,則可以在此同樣將它們輸入。
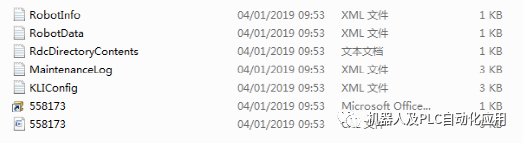
此存檔會顯示在導航器的 ARCHIVE: 目錄中。除網絡路徑外還會自動將其保存在 D: 上。這里會生成一個 INTERN.ZIP 文件。
特殊情況 KrcDiag:
這個菜單項會在網絡路徑上生成文件夾 KRCDiag。該文件夾中包含一個 ZIP壓縮文件。此外還會將此 ZIP 壓縮文件自動存檔到 C:KUKAKRCDiag 上。
機器人數據:在主菜單中選擇投入運行 > 機器人數據。
進入機器人數據畫面的條件:
? 運行方式 T1 或 T2
? 未選定程序。

| 1 | 機器人序列號 |
| 2 | 運行時間。在驅動裝置接通后,運行小時計數器開始運轉。也可通過 $ROBRUNTIME 變量顯示運行時間。 |
| 3 | 機器人本體數據名稱 |
| 4 | 機器人控制系統的名稱。該名稱可以更改。 |
| 5 |
現在可以對該機器人控制系統的數據進行存檔。此處確定目標目錄。可是網絡目錄或本地目錄。 如果此處確定了一個目錄,則導入/導出長文本時也可使用此目錄。 |
| 6 |
若在該路徑上存檔時需要用戶名和密碼,則可以在此將它們輸入。 然后存檔時就不再需要輸入。 |
| 7 | |
| 8 | 只有在復選框將控制系統名稱應用到存檔名稱中未打勾時,才顯示該欄目。這里可以規定存檔文件的名稱。 |
| 9 |
? 復選框打勾:控制系統名稱將被用作存檔文件的名稱。如果沒有規定控制系統名稱,則會使用 archive 作為名稱。 ? 復選框未打勾:可為存檔文件規定自己的名稱。 |
| PID 傳輸至 RDC |
只與精確定位的機器人有關:可以手動將帶精確定位機器人數據的 XML 文件傳輸到 RDC 上。 用該按鈕可以顯示目錄結構。通過該結構可選擇帶當前序列號的文件所處的目錄。可以選中文件并將其傳輸到 RDC 上。 |
| MAM 傳輸至 RDC |
只與零點標定標記固定設定的機器人有關:可以手動將帶機器人特有零點標定偏移數據的 MAM 文件傳輸到 RDC 上。 用該按鈕可以顯示目錄結構。通過該結構可選擇帶當前序列號的文件所處的目錄。可以選中文件并將其傳輸到 RDC 上。 |
| CAL 傳輸至 RDC |
可以手動將帶 EMD 零點標定中數據的 CAL 文件傳輸到 RDC上。 用該按鈕可以顯示目錄結構。通過該結構可選擇帶當前序列號的文件所處的目錄。可以選中文件并將其傳輸到 RDC 上。 |
| 存儲 RDC 數據 |
用該按鈕可以將 RDC 上的數據在目錄 C:KRCRoboterRDC 中進行臨時備份。 提示:在重啟機器人控制系統或存檔數據時將刪除該目錄。如果要持續保留 RDC 數據,則必須在另一個位置上進行備份。 |
實例:
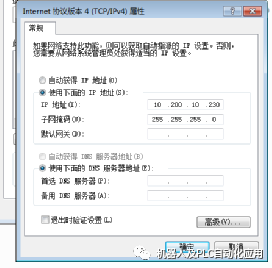
機器人上的設置:設置要存在網上的PC電腦的IP地址,使用的用戶名和密碼.
注意書寫網絡存檔路徑的書寫格式
網絡上的PC上設置的IP要與機器人上設置的一致
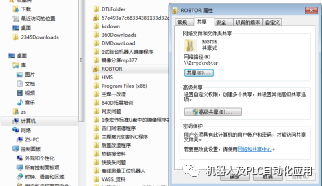
建立共享文件夾”ROBTOR”
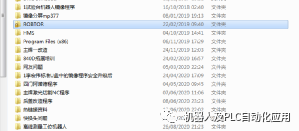
打開文件夾的屬性:
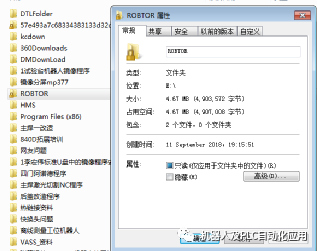
然后選擇共享:
進入”共享”,設置用戶名的權限,選擇”讀/寫”,然后選擇共享,回到上一畫面,點擊’應用’.
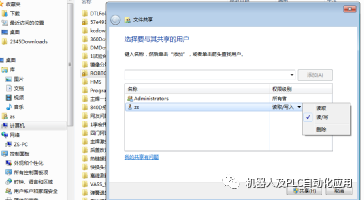
PC 電腦設置完畢。
原文標題:KUKA-C4的通過網絡備份到PC上
文章出處:【微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
PC
+關注
關注
9文章
2102瀏覽量
154528 -
網絡
+關注
關注
14文章
7597瀏覽量
89112
原文標題:KUKA-C4的通過網絡備份到PC上
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MHMF092L1C4-網絡式伺服A6N 設置例 松下

ADS1282采集到的數據傳到PC上應該怎么轉為浮點數?
MHMF082L1C4M-網絡式伺服A6N 設置例 松下
mysql定時備份任務
使用PCM4204進行音頻數據采集的過程中,如何把采集到的音頻數據通過USB傳輸到PC上呢?
MHMF042L1C4M-網絡式伺服A6N 設置例 松下
MHMF042A1C4-網絡式伺服A6N 設置例 松下

MHMF041A1C4-網絡式伺服A6N 設置例 松下
使用Python腳本備份華為交換機的配置信息
IR615如何實現VPN鏈路備份?
IG網關產品實現鏈路備份的方法
在FX3S上如何通過USB和GPIF將數據存儲到eMMC中?
esp8266怎樣才能正確的把更新的代碼升級到target上?
MHMF021A1C4-網絡式伺服A6N 設置例 松下





 工商網監
工商網監
評論