 基于PIC12F675單片機和雙向晶閘管開關實現電動機調速系統的設計
基于PIC12F675單片機和雙向晶閘管開關實現電動機調速系統的設計
作者:許陽明;徐濟仁;王可人;王皓
1 引言
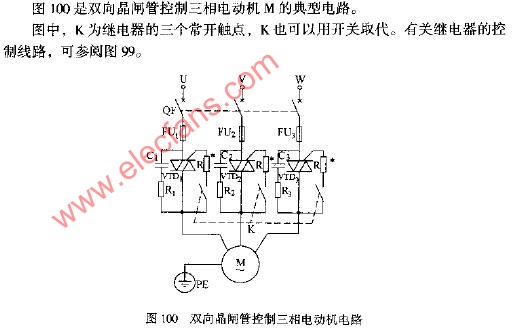
在日常生產與生活中,大量電動機都以規定的速度和功率去拖動各種機械?而在軍事上,很多應用往往要求旋轉天線在各種條件下都要保持勻速轉動,這就要求在不同的情況下,電動機能相應調整工作速度,以保持恒定的速度?要實現這一功能,最常用的方法是對電動機的轉速進行調節?改變直流電動機的電樞或交流電動機的定子電壓,都可以在一定的范圍里改變轉速;也可用雙向晶閘管交流開關或直接選用模擬控制的通用電動機驅動器來取代笨重的電動機?發電機組以及飽和電抗器?本文介紹一個直接由110/240V電源供電的通用電動機驅動電路和一個MCU以及一個雙向晶閘管開關來實現控速的設計方法?其中單片機選用Microchip公司的PIC12F675?與用戶接口的方式有三種一個是接觸傳感器;一個是按鈕;一個是電位器?在該仿真實驗中采用的是電位器?輔助電源從電源電壓中變壓整流獲得?
2 設計方案和結構
2.1 電路結構
電動機的調速系統是一個閉環系統,其結構圖如圖1所示?使用時,可通過設置電位器的電阻大小,并經A/D輸入單片機來預設速度;單片機通過同步電路與220V交流電源同步,并通過輸出脈沖控制晶閘管的通斷,從而控制電動機的速度,同時將電動機的速度通過速度檢測裝置(霍爾開關)反饋給單片機以形成閉環?
2.2 單片機電路的功能原理
該設計中單片機電路的功能原理圖如圖2所示?它由5V直流副電源和220V交流主電源?單片機?雙向晶閘管開關和電機整流電路和霍爾開關組成?其中,單片機的腳1(Vdd)接+5V腳8(Vss)接地,其它引腳的功能與設計如下:
(1)GP3用于上電復位?在通電的瞬間,C3通過R2充電GP3以經延遲后低電平觸發?延遲的大小和CPU的頻率有關,對于PIC12F675單片機,延遲只要大于72ms就可以了?GP3外的電阻可以選1kΩ電容應大于0.1μF?二極管D2的作用是在電源快速反復通斷時,保證C3電容能及時放電?
(2)GP4主要用于速度信息的輸入?該腳外的電位器R1用于為GP4輸入一個電平(GP4在這里的功能是10位A/D轉換器)?該輸入電平通過A/D轉換后,用于給單片機輸入一個預設速度?將該速度和實際速度進行比較,并計算出速度的偏差,然后查表或通過算法便可以得到延遲Td?電位器R1的阻值應較大(在100kΩ左右),以減少5V副電源的負載壓力?
(3) 通過GP2可輸入同步信號?由于220V的交流電源頻率不是很穩,因此,為了保證延遲Td的精確,應通過R5輸入交流信號進行同步?GP2在這里的功能也是A/D轉換器,它可將通過R5輸入的交流信號轉化成數字信號?R5的阻值要大約在1MΩ左右?因為R5直接接在220V的交流電源上,而單片機的輸入電流不能太大?
(4)通過GP0可輸入霍爾器件產生的電動機轉速信號?
霍爾開關是用于磁場檢測的半導體傳感器,霍爾開關的實際接線圖如圖3所示,PIC12F675的1腳接5V直流電源,2腳接地,3腳輸出頻率脈沖給單片機的GP0腳?

在正常工作時,霍爾開關被放置在電動機內按周期強度和方向發生變化的磁場中?其輸出電壓的大小隨著垂直通過霍爾開關半導體薄片的磁場的強度變化,霍爾開關有電流式和開關式兩種?電流式霍爾開關輸出的是模擬信號,可完全包含磁通量的變化情況;而開關式霍爾開關則由于集成了比較器,因而可直接輸出數字信號?本設計采用數字式無疑是最方便的?如果采用電流式,由于選用的是功能全面的自帶比較器的PIC12F675單片機,它的GP1腳上輸入的一個門限電平(由兩個電阻分壓得到)通過單片機內部的比較器和GP0腳的轉速模擬信號進行比較,也可以實現信號檢測?
由于實際的霍爾開關要接在電動機的線圈附近,手工改造電動機相對比較困難?因此,該設計為了方便演示,可以使用一個由555定時器設計的多諧振蕩器產生的頻率脈沖信號來替代霍爾開關的輸出信號?
(5)GP5腳輸出的低電平脈沖用于觸發雙向晶閘管開關,其腳輸出低電平脈沖的時間是由延遲Td決定的,要保證和主電源同步才能使相位平穩的前后移動?GP5腳的低脈沖可以使雙向晶閘管開關保持導通,直到220V電源反向?
此外,在實際應用中,雙向晶閘管開關對觸發電路的要求如下:
(1) 雙向晶閘管開關從截止到完全導通需要一定的時間(一般在10μs下),所以觸發脈沖的寬度要在10μs以上,最好為20~50μs?如果是感性負載,由于電流上升比較慢,實際上還需要更寬的脈沖寬度?
(2) 觸發電路要有足夠大的電壓和電流?電壓應在4~10V,電流要大于10mA,所以可使用5V的副電源?在雙向晶閘管開關和GP5之間應接一個0.2kΩ的電阻?
(3) 不觸發時的電壓應小于0.15~0.2V?觸發脈沖的前沿要盡量陡,應在10μs以下?
3 軟件的實現
圖4是該設計中轉速和檢測信號的波形時序圖,圖5是本設計方案的軟件程序流程圖?該程序的主要步驟是復位?初始化?設置GP2上升沿中斷?設置A/D通道GP4?讀取電位器設定的速度值n(n經過A/D)和讀取Td預先設定值等?當交流電源變為負半周期時,設置GP2下降沿觸發和延遲Td即可輸出寬度為Tg的脈沖,同時設置GP0接收中斷源請求等?一般當霍爾開關輸入為上升沿時中斷,計數器計數,而當霍爾開關再輸入一個上升沿中斷時,計數器停止,并記下數值a,最后在通過比例積分調節算法計算出延遲Td后清除n和a?當交流電源變為正半周期時,在設置GP2上升沿觸發?設置A/D通道GP4?等待中斷?補償延遲T0?延遲Td以及觸發脈沖Tg后,便可通過GP4讀取設置速度n?設計時正負周期的程序循環進行?通過計數器的數值a計算轉速s的算式如下:
s=f/a
其中,f是十六位計數器1的頻率,為1MHz?
實際上,通過n和a由單片機計算延遲td需要一個準確的算法?數字調節算法一般選擇PI算法,這是在工業過程控制中應用最廣泛的一種控制形式?其作用在于能夠集比例調節的快速和積分調節的清除靜差作用于一體,從而使系統的靜?動特性都有所改善?
4 結論
本文設計的簡單易行的電動機調速器雖然解決了電動機的運行效率問題,也比較簡單實用?但也有一些需要改進的地方,尤其在軟件方面,還需要加強功能,以提高算法的效率和準確性?
責任編輯:gt
-
傳感器
+關注
關注
2551文章
51097瀏覽量
753529 -
單片機
+關注
關注
6037文章
44558瀏覽量
635235 -
電動機
+關注
關注
74文章
4110瀏覽量
96292
發布評論請先 登錄
相關推薦
PIC12F675 通過VCP與電腦通信
HiWATH沒有PIC12F675 i的時鐘輸出
為什么PIC12F675沒有睡覺?
單向晶閘管和雙向晶閘管的基本特性
PIC直流電機無級調速系統有何優勢

基于PIC12F675單片機實現電動機調速系統的設計
基于AVR單片機的直流電動機的PWM調速系統設計






 工商網監
工商網監
評論