 利用等面積PWM法實現變頻調速的恒壓頻比控制
利用等面積PWM法實現變頻調速的恒壓頻比控制
隨著電力電子全控型開關器件的出現和發展,脈寬調制技術(PWM)在電力電子變流技術中獲得了廣泛的應用。相比較于硬件實現方法,采用軟件計算的實時PWM控制策略已被接受,并出現了許多不同的PWM波的發生方法,如采樣SPWM法、諧波注入PWM法、均值PWM法、等面積PWM法等。更有將逆變器與負載作為整體建立PWM控制策略的方法,如電動機變頻調速領域常用的基于電動機氣隙磁通軌跡最圓的磁通軌跡法PWM控制、基于電動機電磁轉矩自調整的PWM控制、基于狀態方程和輸出反饋信號推算的無差拍PWM控制等。
文獻推導了基于整流器網側電流矢量推導出同步旋轉坐標系下PWM整流器的數學模型,詳細介紹了基于電流前饋解耦的PWM整流器雙環控制系統設計方法,并應用TMS320LF2407A建立了PWM整流器的DSP數字化系統;文獻針對大功率應用場合的單相PWM整流器,探討了一種適用于單相PWM整流器的網側電流3次諧波抑制方法,分析了單相PWM整流器的工作原理和網側電流的3次諧波產生原因,并將該新型諧波抑制方法與常規控制算法進行了分析對比。文獻依據沖量效果不變理論,給出了采用直接面積等效法計算三相SPWM波的方法,并進行了基于FPGA的發生器軟、硬件設計,取得了較
好的變頻調速效果。
等面積PWM法
等面積PWM法的基本思想是使相同時間間隔內的PWM波的面積與調制波的面積相等,正弦波等面積PWM法的調制原理為:假定一個周期內PWM波的脈沖數為2N,將參考正弦波的整個周期T分為2N等分,則每個區間的長度為,在第i個區間正弦波的面積為:
![]()
設輸出PWM波的幅值為Ud, 采用雙極性調制后,第i個區間內的PWM波形平均值為:
![]()
考慮到有,令,由式(1)、式(2)整理可得:

令,
![]()
,式中為調制深度。
的表達式中雖包含有三角函數的計算,但它僅與N有關,一旦N確定后,可實現將計算好的存入內存中,需要時通過查表方式獲取即可。從k的表達式可以看出,k正比于調制深度而反比于基波頻率。對于通用型交流變頻調速系統來說,通常使為常數來達到恒轉矩控制,若用等面積PWM調制實現時,此時只需使k值為一個常數即可。
綜合上述分析,等面積PWM法的脈沖換相點計算公式為:
由于等面積PWM法生成的PWM波形在處是點對稱的,因而可推導出

等面積PWM法具有算法簡單、占用內存少、產生的PWM波形對稱等優點,并且PWM波脈寬與調制深度M存在一定的線性關系,易于實現變頻調速的恒壓頻比控制。
PWM發生器的設計要求
對于變頻器來說,采用微機生成PWM波時,必須事先確定好載波比N(或者2N)。如果頻率變化較大,那么在整個頻率范圍內采用同一個載波比的同步調制方案,難以兼顧高頻和低頻輸出時的性能。針對于此,最常采用的方法是分段同步調制,即在不同的頻率段選擇不同的載波比,使變頻器在整個頻率變化范圍內,都有一個較為合理的PWM開關頻率,以獲得較好的性能。載波比的選擇和切換必須注意以下兩點:切換時不出現電壓的突變;在各切換臨界點處需設置一個滯環區,以避免輸出頻率落在臨界切換點附近時造成載波頻率反復變化而引起的震蕩現象。
橋臂互鎖和死區時間,逆變器同一橋臂上下兩管的驅動信號必須互鎖通斷以防止橋臂直通而發生斷路,而且兩驅動信號間必須留有一定的死區時間,以防止一管還未完全關斷時另一管便開始導通的短路故障。此要求可以在單片機PWM波的計算程序中加以考慮。
初始狀態及故障封鎖,任何款式型號的CPU,工作前總存在復位狀態,此時CPU各I/O輸出口為全“1”或全“0”,設計時應避免在此復位狀態時造成所有開關管都被驅動導通的危險,因此應將CPU復位時的初始電平值設置成開關管驅動信號無效狀態。此外,當發生故障時,也可以通過輸出故障封鎖信號來關閉驅動信號。
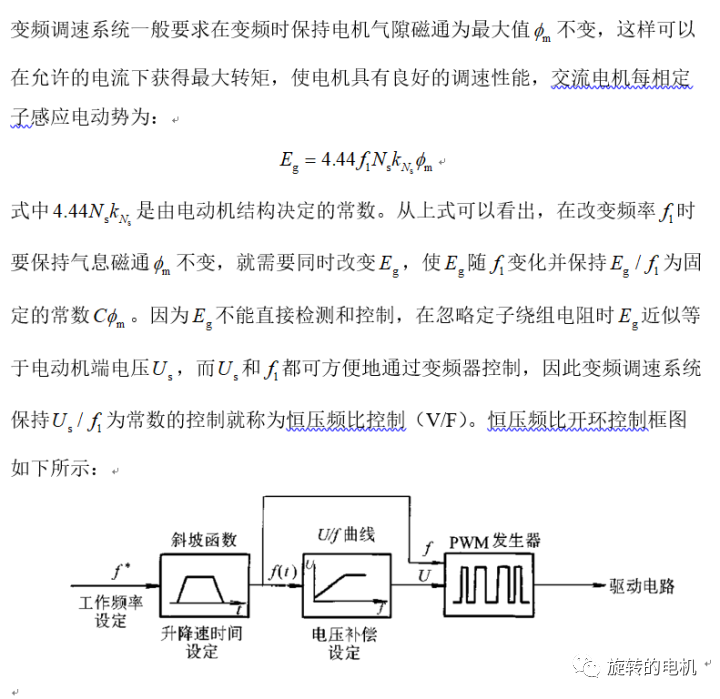
實際設計PWM控制器時,還應考慮滿足一般變頻系統的要求。對交流變頻調速而言,PWM控制器提供逆變器的觸發信號,而控制對象是交流異步電動機,具體來說應考慮:①逆變器的要求。在保證橋臂互鎖和死區時間的同時,為減少逆變器器件的開關損耗,應合理選擇控制器輸出的開關頻率。②異步電機的要求。低頻時,應考慮對電機定子繞組的補償系數;變頻過程應使電壓相位平滑轉換以保證電機氣隙內磁場能連續旋轉;可逆旋轉時,應先降速到最低頻率,然后送出逆序電壓,再升頻到指定值。另外,整個變頻過程還應設置合適的頻率變化率,使得電機的動態工作點選在其機械特性的直線段,使頻率的變化率與電機轉速的跟隨相適應。③改善調速性能的要求。本文采用有級同步式控制,即把調頻范圍劃分為7個頻段,每個頻段內雖然頻率以相同級差變化,但頻率比P不變,所以輸出的脈沖數不變。而各頻段之間,輸出的脈沖數則隨輸出頻率的減低而增多,這就既保持了輸出波形正、負半周完全對稱,也改善了低頻輸出特性,從而就改善了電機的運行性能。
PWM控制器的硬、軟件實現
系統硬件實現
圖1為PWM波控制的變頻調速系統原理框圖。
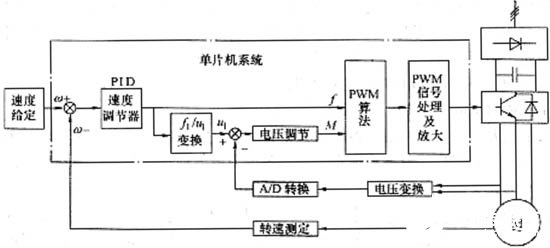
圖1 變頻調速系統原理框圖
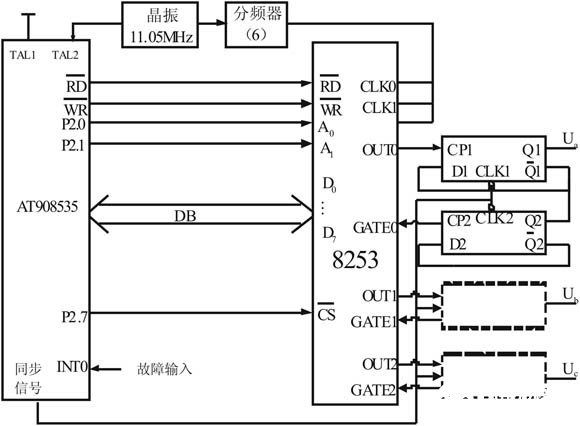
圖2 三相PWM波發生器原理圖
控制器采用AVR單片機AT90S8535,為滿足本文提出的設計要求,單片機的資源分配如下:39引腳的PA1作為A/D采樣輸入口,采樣輸出頻率;17引腳的INT1外部中斷作為電路故障信號(包括過電流、過電壓、短路)的輸入引腳,該引腳也作為“解除封鎖”控制位的輸入引腳,其作用在于:當故障發生時,由外部中斷輸入引腳的信號變化向CPU提出中斷請求,CPU響應中斷,在執行中斷服務程序中輸出PWM封鎖信號并實現閉鎖,直到解除閉鎖控制位有效時,才撤銷PWM封鎖信號,使PWM波能夠正常輸出。由于AT90S8535芯片復位時端口的初始狀態是“高”,因此封鎖信號的驅動信號均設置成“低”電平為無效狀態,此時端口輸出信號使所有功率開關管處于關斷狀態。由于計算PWM換相所需的開關數據是三相的,因而需要三個PWM波換相定時器,再加上載波周期定時器,共需要4個定時器。由于該單片機沒有4個定時器資源,所以需要單片機外部擴展一片具有三個獨立通道的可編程計數/定時器8253芯片組成三相PWM發生器,其擴展的硬件連接如圖2所示。
系統軟件實現
主程序主要完成:各接口芯片的初始化,給相應內存單元賦初值,根據口輸入狀態判正、反轉,升、降速并把判斷結果記錄在用戶設置的標志寄存器中備用。然后分別調用變頻子程序和計算子程序,算出產生三相PWM波所需的定時時間并暫存。在此過程中,由于中斷一直開放,所以不影響PWM波的實時產生,其流程圖如圖3所示。
中斷處理程序中:故障中斷主要用于關A、B、C三相橋臂,封鎖逆變器輸出,送出報警信號,然后返回。A、B、C三相中斷服務程序則完成相應橋臂的觸發信號輸出,裝入新的時間常數,進行中斷計數等。由于該過程三相基本相同,圖4給出了B相的中斷處理程序流程,其中載波周期中產生B相脈沖波形。
這種以單片機為基礎的PWM控制器,硬件簡單、可靠、軟件靈活、易變,可輸出較好的PWM波形,能滿足一般變頻調速系統的要求,特別是利用單片機串行通訊,可十分方便地組成閉環系統。
結語
分析了常見的PWM波算法;分析了等面積PWM法用于交流變頻調速系統時,使壓頻比為常數來達到恒轉矩控制的簡單實現;詳細深入地介紹了等面積PWM法在單片機控制器中的硬件和軟件實現方法。
責任編輯:gt
-
整流器
+關注
關注
28文章
1598瀏覽量
92799 -
控制器
+關注
關注
113文章
16580瀏覽量
180462 -
PWM
+關注
關注
114文章
5214瀏覽量
215879
發布評論請先 登錄
相關推薦
用模糊控制和變頻調速實現恒壓供水
變頻器控制的電動機調速方式解析
3種變頻器控制電機調速的方法
3種變頻器控制電機調速的方法






 工商網監
工商網監
評論