") 介紹簡(jiǎn)單的輕型直流電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī)
介紹簡(jiǎn)單的輕型直流電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī)
直流電動(dòng)機(jī)是連續(xù)的執(zhí)行器,可將電能轉(zhuǎn)換為機(jī)械能。直流電動(dòng)機(jī)通過(guò)產(chǎn)生連續(xù)的角旋轉(zhuǎn)來(lái)實(shí)現(xiàn)此目的,該角旋轉(zhuǎn)可用于旋轉(zhuǎn)泵,風(fēng)扇,壓縮機(jī),車(chē)輪等。
與傳統(tǒng)的旋轉(zhuǎn)直流電動(dòng)機(jī)一樣,也可以使用線(xiàn)性電動(dòng)機(jī),它們能夠產(chǎn)生連續(xù)的襯套運(yùn)動(dòng)。基本上有三種類(lèi)型的常規(guī)電動(dòng)機(jī)可用:AC型電動(dòng)機(jī),DC型電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī)。
典型的小型直流電動(dòng)機(jī)
交流電動(dòng)機(jī)通常用于高功率的單相或多相工業(yè)應(yīng)用中,需要恒定的旋轉(zhuǎn)扭矩和速度來(lái)控制大負(fù)載,例如風(fēng)扇或泵。
在本教程中,我們僅介紹簡(jiǎn)單的輕型直流電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī),這些電動(dòng)機(jī)用于許多不同類(lèi)型的電子,位置控制,微處理器,PIC和機(jī)器人類(lèi)型的電路中。
基本直流電動(dòng)機(jī)該直流電動(dòng)機(jī)或直流電動(dòng)機(jī),以給它的完整的標(biāo)題,是用于產(chǎn)生連續(xù)運(yùn)動(dòng)和旋轉(zhuǎn),其速度可以容易地控制,從而使它們適合于應(yīng)用中使用是速度控制,伺服控制類(lèi)型的最常用的致動(dòng)器,和/或需要定位。直流電動(dòng)機(jī)由兩部分組成,“定子”是固定部分,而“轉(zhuǎn)子”是旋轉(zhuǎn)部分。結(jié)果是基本上可以使用三種類(lèi)型的直流電動(dòng)機(jī)。
有刷電機(jī)–這種類(lèi)型的電機(jī)通過(guò)使電流流經(jīng)換向器和碳刷組件而在繞線(xiàn)轉(zhuǎn)子(旋轉(zhuǎn)的零件)中產(chǎn)生磁場(chǎng),因此稱(chēng)為“有刷”。定子(靜止部分)的磁場(chǎng)是通過(guò)使用繞制的定子勵(lì)磁繞組或永磁體產(chǎn)生的。通常,有刷直流電動(dòng)機(jī)便宜,體積小且易于控制。
無(wú)刷電動(dòng)機(jī)–這種電動(dòng)機(jī)通過(guò)使用附著在其上的永磁體在轉(zhuǎn)子中產(chǎn)生磁場(chǎng),并通過(guò)電子方式實(shí)現(xiàn)換向。它們通常比常規(guī)的有刷型直流電動(dòng)機(jī)更小,但價(jià)格更高,因?yàn)樗鼈冊(cè)诙ㄗ又惺褂谩盎魻栃?yīng)”開(kāi)關(guān)來(lái)產(chǎn)生所需的定子磁場(chǎng)旋轉(zhuǎn)順序,但是它們具有更好的轉(zhuǎn)矩/速度特性,效率更高且使用壽命更長(zhǎng)比同等拉絲類(lèi)型。
伺服電動(dòng)機(jī)–這種電動(dòng)機(jī)基本上是一種有刷直流電動(dòng)機(jī),帶有某種形式的位置反饋控制連接到轉(zhuǎn)子軸。它們連接到PWM型控制器并由其控制,主要用于位置控制系統(tǒng)和無(wú)線(xiàn)電控制模型。
普通的直流電動(dòng)機(jī)具有幾乎線(xiàn)性的特性,其旋轉(zhuǎn)速度取決于所施加的直流電壓,輸出轉(zhuǎn)矩則取決于流經(jīng)電動(dòng)機(jī)繞組的電流。任何直流電動(dòng)機(jī)的旋轉(zhuǎn)速度可以從每分鐘幾轉(zhuǎn)(rpm)到每分鐘幾千轉(zhuǎn)不等,從而使其適用于電子,汽車(chē)或機(jī)器人應(yīng)用。通過(guò)將它們連接到變速箱或齒輪系,可以降低它們的輸出速度,同時(shí)又可以提高電動(dòng)機(jī)的高速轉(zhuǎn)矩輸出。
“有刷”直流電動(dòng)機(jī)傳統(tǒng)的有刷直流電動(dòng)機(jī)基本上由兩部分組成,電動(dòng)機(jī)的靜止主體稱(chēng)為定子,而內(nèi)部旋轉(zhuǎn)產(chǎn)生的運(yùn)動(dòng)稱(chēng)為直流電動(dòng)機(jī)的轉(zhuǎn)子或“電樞”。
電機(jī)繞制定子是一個(gè)電磁電路,由圓形連接在一起的電線(xiàn)圈組成,以產(chǎn)生所需的北極,南極,然后是北極等類(lèi)型的旋轉(zhuǎn)固定磁場(chǎng)系統(tǒng),這與交流電機(jī)不同。定子磁場(chǎng)以施加的頻率連續(xù)旋轉(zhuǎn)。在這些勵(lì)磁線(xiàn)圈中流動(dòng)的電流稱(chēng)為電動(dòng)機(jī)勵(lì)磁電流。
這些形成定子磁場(chǎng)的電磁線(xiàn)圈可以與電動(dòng)機(jī)電樞串聯(lián),并聯(lián)或同時(shí)電連接在一起(復(fù)合)。串聯(lián)繞制直流電動(dòng)機(jī)的定子勵(lì)磁繞組與電樞串聯(lián)連接。同樣,并聯(lián)繞組直流電動(dòng)機(jī)的定子勵(lì)磁繞組與電樞并聯(lián),如圖所示。
串聯(lián)和并聯(lián)直流電動(dòng)機(jī)
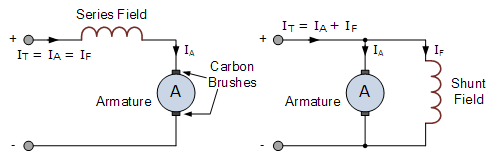
直流電機(jī)的轉(zhuǎn)子或電樞由載流導(dǎo)體組成,載流導(dǎo)體的一端連接到稱(chēng)為換向器的電隔離銅段。換向器允許在電樞旋轉(zhuǎn)時(shí)通過(guò)碳刷(因此稱(chēng)為“有刷”電動(dòng)機(jī))與外部電源進(jìn)行電氣連接。
轉(zhuǎn)子建立的磁場(chǎng)試圖使其自身與靜止的定子磁場(chǎng)對(duì)準(zhǔn),從而導(dǎo)致轉(zhuǎn)子沿其軸線(xiàn)旋轉(zhuǎn),但由于換向延遲而無(wú)法使其自身對(duì)準(zhǔn)。電動(dòng)機(jī)的轉(zhuǎn)速取決于轉(zhuǎn)子磁場(chǎng)的強(qiáng)度,施加在電動(dòng)機(jī)上的電壓越大,轉(zhuǎn)子旋轉(zhuǎn)得越快。通過(guò)改變施加的直流電壓,也可以改變電動(dòng)機(jī)的轉(zhuǎn)速。
常規(guī)(有刷)直流電動(dòng)機(jī)
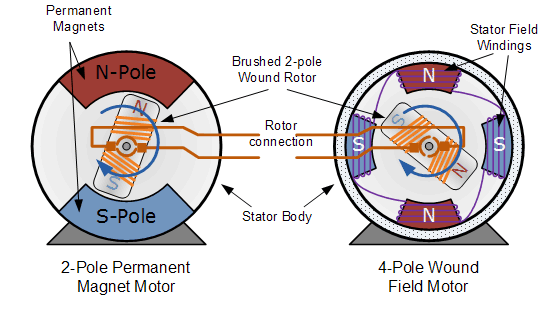
永磁(PMDC)有刷直流電動(dòng)機(jī)通常比同等繞制定子型直流電動(dòng)機(jī)表親小得多,并且便宜得多,因?yàn)樗鼈儧](méi)有勵(lì)磁繞組。在永磁直流(PMDC)電動(dòng)機(jī)中,這些勵(lì)磁線(xiàn)圈被具有很高磁場(chǎng)能量的強(qiáng)稀土(例如(Cobolt或釹鐵硼)磁體代替。
永磁體的使用使直流電動(dòng)機(jī)的線(xiàn)性速度/轉(zhuǎn)矩特性比同等的繞線(xiàn)電動(dòng)機(jī)好得多,這是因?yàn)槠渚哂杏谰眯缘拇艌?chǎng)(有時(shí)是非常強(qiáng)的磁場(chǎng)),使其更適合用于模型,機(jī)器人和伺服系統(tǒng)。
盡管直流有刷電動(dòng)機(jī)非常高效且便宜,但與直流有刷電動(dòng)機(jī)相關(guān)的問(wèn)題是,在重載條件下,換向器和碳刷的兩個(gè)表面之間會(huì)產(chǎn)生火花,導(dǎo)致自發(fā)熱,短壽命以及由于火花產(chǎn)生的電噪聲,這會(huì)損壞任何半導(dǎo)體開(kāi)關(guān)器件,例如MOSFET或晶體管。為了克服這些缺點(diǎn),開(kāi)發(fā)了無(wú)刷直流電動(dòng)機(jī)。
“無(wú)刷”直流電動(dòng)機(jī)無(wú)刷直流電動(dòng)機(jī)(BDCM)與永磁直流電動(dòng)機(jī)非常相似,但是沒(méi)有任何電刷可更換或由于換向器火花而磨損。因此,在轉(zhuǎn)子中產(chǎn)生的熱量很少,從而延長(zhǎng)了電動(dòng)機(jī)的壽命。無(wú)刷電機(jī)的設(shè)計(jì)通過(guò)使用更復(fù)雜的驅(qū)動(dòng)電路來(lái)消除對(duì)電刷的需求,因?yàn)檗D(zhuǎn)子磁場(chǎng)是永久磁鐵,始終與定子磁場(chǎng)保持同步,從而可以實(shí)現(xiàn)更精確的速度和轉(zhuǎn)矩控制。
然后,無(wú)刷直流電動(dòng)機(jī)的結(jié)構(gòu)與交流電動(dòng)機(jī)非常相似,因此成為真正的同步電動(dòng)機(jī),但缺點(diǎn)是它比等效的“有刷”電動(dòng)機(jī)設(shè)計(jì)貴。
無(wú)刷直流電動(dòng)機(jī)的控制與普通的有刷直流電動(dòng)機(jī)的控制方法有很大的不同,因?yàn)樗c某些有刷直流電動(dòng)機(jī)的控制方式相結(jié)合,可以檢測(cè)出產(chǎn)生控制半導(dǎo)體開(kāi)關(guān)所需的反饋信號(hào)所需的轉(zhuǎn)子角位置(或磁極)。設(shè)備。最常見(jiàn)的位置/極點(diǎn)傳感器是“霍爾效應(yīng)傳感器”,但是某些電動(dòng)機(jī)也使用光學(xué)傳感器。
使用霍爾效應(yīng)傳感器,電磁鐵的極性由電動(dòng)機(jī)控制驅(qū)動(dòng)電路切換。然后,可以輕松地將電動(dòng)機(jī)與數(shù)字時(shí)鐘信號(hào)同步,從而提供精確的速度控制。無(wú)刷直流電動(dòng)機(jī)可構(gòu)造成具有外部永磁體轉(zhuǎn)子和內(nèi)部電磁定子,或內(nèi)部永磁體轉(zhuǎn)子和外部電磁定子。
與“有刷”表兄相比,無(wú)刷直流電動(dòng)機(jī)的優(yōu)點(diǎn)是效率更高,可靠性更高,電氣噪聲更低,速度控制良好,更重要的是,沒(méi)有電刷或換向器會(huì)產(chǎn)生更高的轉(zhuǎn)速。然而,它們的缺點(diǎn)是它們更昂貴并且控制更復(fù)雜。
直流伺服電機(jī)直流伺服電動(dòng)機(jī)用于閉環(huán)型應(yīng)用,將輸出電動(dòng)機(jī)軸的位置反饋到電動(dòng)機(jī)控制電路。典型的位置“反饋”設(shè)備包括用于無(wú)線(xiàn)電控制模型(例如飛機(jī)和輪船等)的旋轉(zhuǎn)變壓器,編碼器和電位計(jì)。
伺服電動(dòng)機(jī)通常包括用于減速的內(nèi)置齒輪箱,并且能夠直接傳遞高扭矩。由于安裝了變速箱和反饋裝置,因此伺服電動(dòng)機(jī)的輸出軸不能像直流電動(dòng)機(jī)的軸那樣自由旋轉(zhuǎn)。
直流伺服電機(jī)框圖
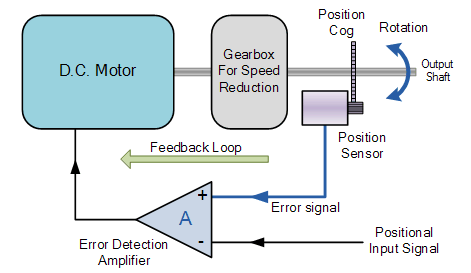
伺服電動(dòng)機(jī)由直流電動(dòng)機(jī),減速齒輪箱,位置反饋裝置和某種形式的誤差校正組成。相對(duì)于施加到設(shè)備的位置輸入信號(hào)或參考信號(hào)來(lái)控制速度或位置。
RC伺服馬達(dá)
錯(cuò)誤檢測(cè)放大器會(huì)查看此輸入信號(hào),并將其與來(lái)自電機(jī)輸出軸的反饋信號(hào)進(jìn)行比較,以確定電機(jī)輸出軸是否處于錯(cuò)誤狀態(tài),如果是,則控制器會(huì)進(jìn)行適當(dāng)?shù)男U允闺姍C(jī)加速或減速它下來(lái)。對(duì)位置反饋設(shè)備的這種響應(yīng)意味著伺服電機(jī)在“閉環(huán)系統(tǒng)”內(nèi)運(yùn)行。
除大型工業(yè)應(yīng)用外,伺服電動(dòng)機(jī)還用于小型遙控模型和機(jī)器人技術(shù)中,大多數(shù)伺服電動(dòng)機(jī)都可以在兩個(gè)方向上旋轉(zhuǎn)大約180度,因此非常適合精確的角度定位。但是,除非特別修改,否則這些RC型伺服器無(wú)法像傳統(tǒng)的DC電動(dòng)機(jī)一樣連續(xù)高速旋轉(zhuǎn)。
伺服電動(dòng)機(jī)由一個(gè)裝置中的多個(gè)裝置,電動(dòng)機(jī),變速箱,反饋裝置和用于控制位置,方向或速度的誤差校正組成。它們僅需使用電源,接地和信號(hào)控制三根導(dǎo)線(xiàn)即可輕松控制,因此廣泛用于機(jī)器人和小型模型。
直流電動(dòng)機(jī)開(kāi)關(guān)與控制小型直流電動(dòng)機(jī)可以通過(guò)開(kāi)關(guān),繼電器,晶體管或MOSFET電路“接通”或“斷開(kāi)”,最簡(jiǎn)單的電動(dòng)機(jī)控制形式是“線(xiàn)性”控制。這種類(lèi)型的電路使用雙極晶體管作為開(kāi)關(guān)(如果需要更高的額定電流,也可以使用達(dá)林頓晶體管),以通過(guò)單個(gè)電源控制電動(dòng)機(jī)。
通過(guò)改變流入晶體管的基極電流量,可以控制電動(dòng)機(jī)的速度,例如,如果晶體管“半路”導(dǎo)通,則只有一半的電源電壓流向電動(dòng)機(jī)。如果晶體管“完全導(dǎo)通”(飽和),則所有電源電壓都流向電動(dòng)機(jī),并且旋轉(zhuǎn)速度更快。然后,對(duì)于這種線(xiàn)性控制類(lèi)型,功率將不斷地傳遞到電動(dòng)機(jī),如下所示。
電機(jī)速度控制
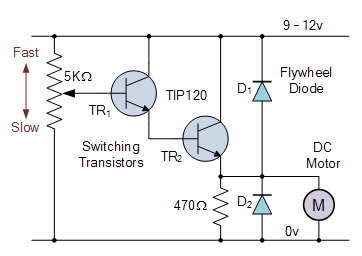
上面的簡(jiǎn)單開(kāi)關(guān)電路顯示了單向(僅一個(gè)方向)電動(dòng)機(jī)速度控制電路的電路。由于直流電動(dòng)機(jī)的轉(zhuǎn)速與兩端的電壓成正比,因此我們可以使用晶體管來(lái)調(diào)節(jié)該端電壓。
兩個(gè)晶體管作為達(dá)林頓對(duì)連接,以控制電動(dòng)機(jī)的主電樞電流。甲5kΩ的電位器是用于基極驅(qū)動(dòng)量控制到所述第一導(dǎo)頻晶體管TR 1,這反過(guò)來(lái)又控制主開(kāi)關(guān)晶體管,TR 2允許馬達(dá)的DC電壓從零變化到Vcc,在本實(shí)施例9至12中伏特。
可選的飛輪二極管跨接在開(kāi)關(guān)晶體管TR 2和電機(jī)端子之間,以防止電機(jī)旋轉(zhuǎn)時(shí)產(chǎn)生的反電動(dòng)勢(shì)。可調(diào)電位器可以用直接加到電路輸入端的連續(xù)邏輯“ 1”或邏輯“ 0”信號(hào)代替,以分別將電動(dòng)機(jī)“全開(kāi)”(飽和)或“全關(guān)”(切斷)從微控制器或PIC的端口。
除了基本的速度控制之外,還可以使用相同的電路來(lái)控制電動(dòng)機(jī)的轉(zhuǎn)速。通過(guò)以足夠高的頻率反復(fù)切換電動(dòng)機(jī)電流“ ON”和“ OFF”,可以通過(guò)改變其標(biāo)記空間比來(lái)在靜止(0 rpm)和全速(100%)之間改變電動(dòng)機(jī)的速度。供應(yīng)。這可以通過(guò)改變“開(kāi)啟”時(shí)間(t ON)與“關(guān)閉”時(shí)間(t OFF)的比例來(lái)實(shí)現(xiàn),并且可以使用稱(chēng)為脈沖寬度調(diào)制的過(guò)程來(lái)實(shí)現(xiàn)。
脈沖寬度速度控制前面我們?cè)f(shuō)過(guò),直流電動(dòng)機(jī)的轉(zhuǎn)速與其端子上的平均(平均)電壓值成正比,并且該值越高,直到達(dá)到最大允許電動(dòng)機(jī)電壓,電動(dòng)機(jī)旋轉(zhuǎn)的速度就越快。換句話(huà)說(shuō),電壓越高,速度越快。通過(guò)改變“開(kāi)”(t ON)時(shí)間和“關(guān)”(t OFF)持續(xù)時(shí)間之間的比率,稱(chēng)為“占空比”,“標(biāo)記/間距比率”或“占空比”,可以得出電機(jī)電壓及其轉(zhuǎn)速可以改變。對(duì)于簡(jiǎn)單的單極驅(qū)動(dòng)器,占空比β為:
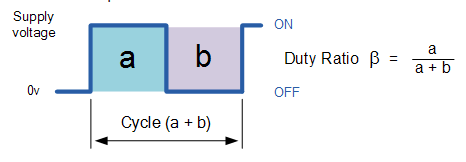
饋入電動(dòng)機(jī)的平均直流輸出電壓為:Vmean =βx Vsupply。然后,通過(guò)改變脈沖a的寬度,可以控制電動(dòng)機(jī)電壓,從而可以控制施加到電動(dòng)機(jī)的功率,這種控制方式稱(chēng)為脈沖寬度調(diào)制或PWM。
控制電動(dòng)機(jī)轉(zhuǎn)速的另一種方法是在保持“開(kāi)”和“關(guān)”占空比時(shí)間不變的情況下改變頻率(以及控制電壓的時(shí)間段)。這種控制稱(chēng)為脈沖頻率調(diào)制或PFM。
通過(guò)脈沖頻率調(diào)制,通過(guò)施加可變頻率的脈沖來(lái)控制電動(dòng)機(jī)電壓,例如,以低頻或只有很少的脈沖,施加到電動(dòng)機(jī)的平均電壓較低,因此電動(dòng)機(jī)速度較慢。在較高頻率下或帶有許多脈沖時(shí),平均電動(dòng)機(jī)端子電壓會(huì)增加,并且電動(dòng)機(jī)速度也會(huì)增加。
然后,晶體管可用于控制施加到直流電動(dòng)機(jī)的功率,其工作模式為“線(xiàn)性”(電動(dòng)機(jī)電壓變化),“脈沖寬度調(diào)制”(脈沖寬度變化)或“脈沖頻率”調(diào)制”(改變脈沖頻率)。
反轉(zhuǎn)直流電動(dòng)機(jī)的方向盡管用單個(gè)晶體管控制直流電動(dòng)機(jī)的速度具有許多優(yōu)點(diǎn),但它也有一個(gè)主要缺點(diǎn),即旋轉(zhuǎn)方向始終相同,這是一個(gè)“單向”電路。在許多應(yīng)用中,我們需要沿正反兩個(gè)方向操作電動(dòng)機(jī)。
為了控制直流電動(dòng)機(jī)的方向,必須反轉(zhuǎn)施加到電動(dòng)機(jī)連接處的直流電源的極性,以使其軸沿相反方向旋轉(zhuǎn)。
控制直流電動(dòng)機(jī)旋轉(zhuǎn)方向的一種非常簡(jiǎn)單且便宜的方法,是使用按以下方式排列的不同開(kāi)關(guān):
直流電動(dòng)機(jī)方向控制
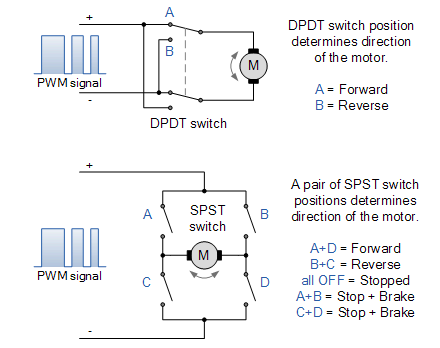
第一個(gè)電路使用單個(gè)雙刀雙擲(DPDT)開(kāi)關(guān)來(lái)控制電動(dòng)機(jī)連接的極性。通過(guò)切換觸點(diǎn),可以將電動(dòng)機(jī)端子的電源反向,并使電動(dòng)機(jī)的方向反向。第二個(gè)電路稍微復(fù)雜一些,并使用四個(gè)以“ H”形配置的單刀單擲(SPST)開(kāi)關(guān)。
機(jī)械開(kāi)關(guān)成對(duì)布置,并且必須以特定的組合方式操作才能操作或停止直流電動(dòng)機(jī)。例如,如圖所示,開(kāi)關(guān)組合A + D控制正向旋轉(zhuǎn),而開(kāi)關(guān)B + C控制反向旋轉(zhuǎn)。組合開(kāi)關(guān)A + B或C + D使電動(dòng)機(jī)端子短路,從而使其迅速制動(dòng)。但是,以這種方式使用開(kāi)關(guān)有其危險(xiǎn),因?yàn)橐黄鸩僮鏖_(kāi)關(guān)A + C或B + D會(huì)使電源短路。
盡管以上兩個(gè)電路在大多數(shù)小型直流電動(dòng)機(jī)應(yīng)用中都能很好地工作,但我們是否真的要操作機(jī)械開(kāi)關(guān)的不同組合只是為了反轉(zhuǎn)電動(dòng)機(jī)的方向?我們可以更改機(jī)電繼電器組的手動(dòng)開(kāi)關(guān),并具有單個(gè)前進(jìn)/后退按鈕或開(kāi)關(guān),甚至可以使用固態(tài)CMOS 4066B四邊雙向開(kāi)關(guān)。
但是,實(shí)現(xiàn)電動(dòng)機(jī)雙向控制(以及其速度)的另一種很好的方法是將電動(dòng)機(jī)連接到晶體管H橋型電路裝置,如下所示。
基本雙向H橋電路
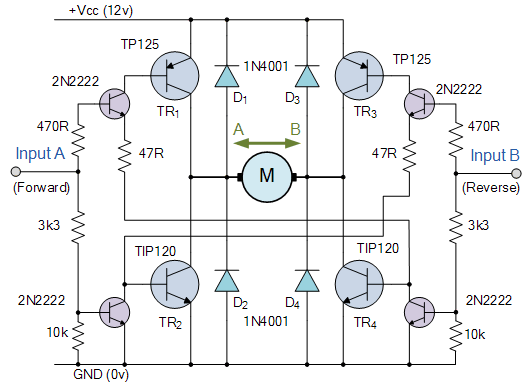
所述H橋電路的上方,如此命名是因?yàn)樗膫€(gè)開(kāi)關(guān),無(wú)論是電動(dòng)機(jī)械繼電器或晶體管類(lèi)似于字母“H”與位于中心條上的電動(dòng)機(jī)的基本結(jié)構(gòu)。晶體管或MOSFET H橋可能是雙向DC電動(dòng)機(jī)控制電路中最常用的類(lèi)型之一。它在每個(gè)分支中使用NPN和PNP的“互補(bǔ)晶體管對(duì)”,晶體管成對(duì)切換到一起以控制電動(dòng)機(jī)。
控制輸入A在一個(gè)方向(正向旋轉(zhuǎn))上運(yùn)行電動(dòng)機(jī),而輸入B在另一個(gè)方向(即反向旋轉(zhuǎn))上運(yùn)行電動(dòng)機(jī)。然后,通過(guò)將其“對(duì)角線(xiàn)對(duì)”中的晶體管切換為“ ON”或“ OFF”,可以實(shí)現(xiàn)電動(dòng)機(jī)的方向控制。
例如,當(dāng)晶體管TR1為“ ON”且晶體管TR2為“ OFF”時(shí),點(diǎn)A連接至電源電壓(+ Vcc),如果晶體管TR3為“ OFF”且晶體管TR4為“ ON”,則點(diǎn)B連接至0伏(GND)。然后,電動(dòng)機(jī)將沿與電動(dòng)機(jī)端子A為正且電動(dòng)機(jī)端子B為負(fù)的一個(gè)方向旋轉(zhuǎn)。
如果切換狀態(tài)反轉(zhuǎn),從而TR1為“ OFF”,TR2為“ ON”,TR3為“ ON”,TR4為“ OFF”,則電動(dòng)機(jī)電流將沿相反方向流動(dòng),從而使電動(dòng)機(jī)反向旋轉(zhuǎn)方向。
然后,通過(guò)將相反的邏輯電平“ 1”或“ 0”應(yīng)用于輸入端A和B,可以如下控制電動(dòng)機(jī)的旋轉(zhuǎn)方向。
H橋真值表
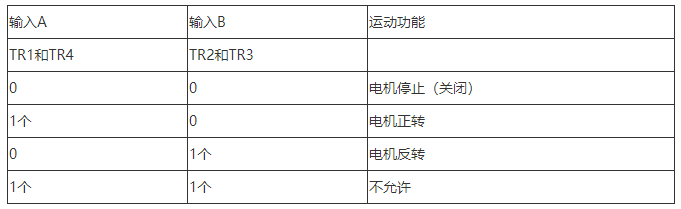
重要的是,不允許有其他輸入組合,因?yàn)檫@可能會(huì)導(dǎo)致電源短路,即,兩個(gè)晶體管TR1和TR2同時(shí)切換為“ ON”(保險(xiǎn)絲=爆炸!)。
如同上面看到的單向直流電動(dòng)機(jī)控制一樣,也可以使用脈沖寬度調(diào)制或PWM控制電動(dòng)機(jī)的轉(zhuǎn)速。然后,通過(guò)將H橋開(kāi)關(guān)與PWM控制相結(jié)合,可以精確地控制電動(dòng)機(jī)的方向和速度。
商用現(xiàn)成的解碼器IC,例如SN754410四通道半H橋IC或具有2個(gè)H橋的L298N,可提供內(nèi)置的所有必要控制和安全邏輯,這些邏輯和安全邏輯是專(zhuān)門(mén)為H橋雙向電動(dòng)機(jī)控制電路設(shè)計(jì)的。
直流步進(jìn)電機(jī)像上面的直流電動(dòng)機(jī)一樣,步進(jìn)電動(dòng)機(jī)也是機(jī)電致動(dòng)器,它將脈沖數(shù)字輸入信號(hào)轉(zhuǎn)換為離散的(增量的)機(jī)械運(yùn)動(dòng),已廣泛用于工業(yè)控制應(yīng)用中。步進(jìn)電動(dòng)機(jī)是同步無(wú)刷電動(dòng)機(jī)的一種,它不具有帶有換向器和碳刷的電樞,而是具有由許多轉(zhuǎn)子組成的轉(zhuǎn)子,某些類(lèi)型的轉(zhuǎn)子具有數(shù)百個(gè)永磁齒和帶有單個(gè)繞組的定子。
顧名思義,步進(jìn)電機(jī)不會(huì)像常規(guī)直流電機(jī)那樣連續(xù)旋轉(zhuǎn),而是以離散的“步進(jìn)”或“增量”運(yùn)動(dòng),每次旋轉(zhuǎn)或步進(jìn)的角度取決于定子磁極和轉(zhuǎn)子的數(shù)量步進(jìn)電機(jī)的齒。
由于其離散的步進(jìn)操作,步進(jìn)電機(jī)可以輕松地一次旋轉(zhuǎn)有限的一部分旋轉(zhuǎn),例如1.8、3.6、7.5度等。因此,例如,假設(shè)步進(jìn)電機(jī)完成一整圈(360 o分100步。
然后,電動(dòng)機(jī)的步距角為360度/ 100步=每步3.6度。該值通常稱(chēng)為步進(jìn)電機(jī)“步進(jìn)角”。
步進(jìn)電機(jī)有三種基本類(lèi)型,可變磁阻,永磁體和混合動(dòng)力(兩者的一種組合)。甲步進(jìn)電機(jī)特別適用于需要精確的定位和可重復(fù)性一起啟動(dòng),停止,反轉(zhuǎn)和速度控制與步進(jìn)電機(jī)的另一個(gè)關(guān)鍵特征的快速響應(yīng)的應(yīng)用程序,是能夠保持負(fù)載能力穩(wěn)定一旦需要的位置是實(shí)現(xiàn)。
通常,步進(jìn)電動(dòng)機(jī)具有一個(gè)內(nèi)部轉(zhuǎn)子,該內(nèi)部轉(zhuǎn)子具有大量的永磁體“齒”,并且多個(gè)電磁體“齒”安裝在定子上。定子電磁體依次被極化和去極化,從而使轉(zhuǎn)子一次旋轉(zhuǎn)一個(gè)“步長(zhǎng)”。
現(xiàn)代的多極,多齒步進(jìn)電機(jī)的每步精度小于0.9度(每轉(zhuǎn)400脈沖),主要用于高度精確的定位系統(tǒng),例如用于軟盤(pán)/硬盤(pán)驅(qū)動(dòng)器中的磁頭的定位系統(tǒng),打印機(jī)/繪圖儀或機(jī)器人應(yīng)用程序。最常用的步進(jìn)電機(jī)是每轉(zhuǎn)200步的步進(jìn)電機(jī)。它具有50個(gè)齒的轉(zhuǎn)子,4相定子和1.8度(360度/(50×4))的步進(jìn)角。
步進(jìn)電機(jī)的構(gòu)造與控制
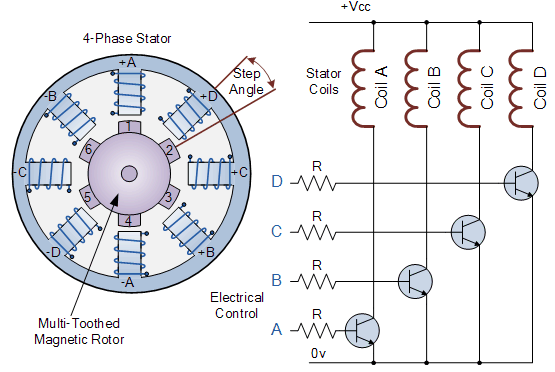
在上面的可變磁阻步進(jìn)電動(dòng)機(jī)的簡(jiǎn)單示例中,電動(dòng)機(jī)由一個(gè)中心轉(zhuǎn)子組成,該中心轉(zhuǎn)子被四個(gè)標(biāo)記為A,B,C和D的電磁場(chǎng)線(xiàn)圈包圍。所有具有相同字母的線(xiàn)圈都連接在一起,以便通電,例如標(biāo)記為A的線(xiàn)圈將導(dǎo)致磁轉(zhuǎn)子與該組線(xiàn)圈對(duì)齊。
通過(guò)依次向每組線(xiàn)圈供電,可以使轉(zhuǎn)子從一個(gè)位置旋轉(zhuǎn)或“步進(jìn)”一個(gè)角度,該角度由其步進(jìn)角度構(gòu)造確定,并且通過(guò)依次激勵(lì)線(xiàn)圈,轉(zhuǎn)子將產(chǎn)生旋轉(zhuǎn)運(yùn)動(dòng)。
步進(jìn)電機(jī)驅(qū)動(dòng)器通過(guò)按設(shè)置順序?yàn)閯?lì)磁線(xiàn)圈通電(例如“ ADCB,ADCB,ADCB,A… ”等)來(lái)控制電機(jī)的步進(jìn)角和速度,轉(zhuǎn)子將沿一個(gè)方向(正向)旋轉(zhuǎn),將脈沖序列反轉(zhuǎn)為“ ABCD,ABCD,ABCD,A… ”等,轉(zhuǎn)子將沿相反方向旋轉(zhuǎn)(反向)。
因此,在上面的簡(jiǎn)單示例中,步進(jìn)電機(jī)有四個(gè)線(xiàn)圈,使其成為4相電機(jī),定子上的極數(shù)為八(2 x 4),每相的間隔為45度。轉(zhuǎn)子上的齒數(shù)為六個(gè),相距60度。
然后,轉(zhuǎn)子有24個(gè)(6個(gè)齒x 4個(gè)線(xiàn)圈)可能的位置或“階梯”完成一整圈。因此,上述步距角為:360 o / 24 = 15 o。
顯然,更多的轉(zhuǎn)子齒和/或定子線(xiàn)圈將導(dǎo)致更多的控制和更小的步進(jìn)角。同樣,通過(guò)以不同的配置連接電動(dòng)機(jī)的電線(xiàn)圈,可以實(shí)現(xiàn)全步距,半步距和微步距角。但是,要實(shí)現(xiàn)微步進(jìn),步進(jìn)電機(jī)必須由(準(zhǔn))正弦電流驅(qū)動(dòng),該電流的實(shí)現(xiàn)成本很高。
也可以通過(guò)改變施加到線(xiàn)圈的數(shù)字脈沖之間的時(shí)間延遲(頻率)來(lái)控制步進(jìn)電機(jī)的旋轉(zhuǎn)速度,延遲時(shí)間越長(zhǎng),一整圈的速度就越慢。通過(guò)對(duì)電動(dòng)機(jī)施加固定數(shù)量的脈沖,電動(dòng)機(jī)軸將旋轉(zhuǎn)給定角度。
使用延時(shí)脈沖的優(yōu)勢(shì)在于,不需要任何形式的附加反饋,因?yàn)橥ㄟ^(guò)對(duì)提供給電動(dòng)機(jī)的脈沖數(shù)進(jìn)行計(jì)數(shù),可以準(zhǔn)確知道轉(zhuǎn)子的最終位置。對(duì)一定數(shù)量的數(shù)字輸入脈沖的這種響應(yīng)使步進(jìn)電機(jī)可以在“開(kāi)環(huán)系統(tǒng)”中運(yùn)行,從而使控制變得既容易又便宜。
例如,假設(shè)我們上面的步進(jìn)電機(jī)的步距角為每步3.6度。要使電動(dòng)機(jī)旋轉(zhuǎn)例如216度的角度,然后再在所需位置停止,則總共需要:216度/(3.6度/步)= 80個(gè)脈沖施加到定子線(xiàn)圈。
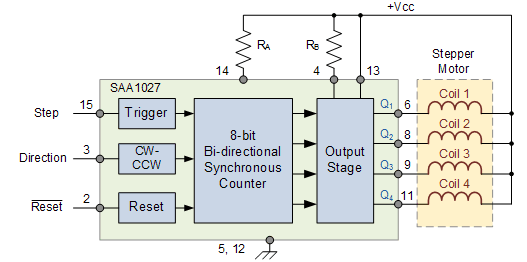
有許多步進(jìn)電機(jī)控制器IC可用,它們可以控制步進(jìn)速度,旋轉(zhuǎn)速度和電機(jī)方向。SAA1027是這樣的一種控制器IC,它內(nèi)置了所有必需的計(jì)數(shù)器和代碼轉(zhuǎn)換功能,并且可以按照正確的順序自動(dòng)驅(qū)動(dòng)4個(gè)完全受控的橋式輸出到電動(dòng)機(jī)。
旋轉(zhuǎn)方向也可以與單步模式或沿所選方向的連續(xù)(無(wú)級(jí))旋轉(zhuǎn)一起選擇,但這給控制器帶來(lái)了一些負(fù)擔(dān)。當(dāng)使用8位數(shù)字控制器時(shí),每步也可以實(shí)現(xiàn)256微步
SAA1027步進(jìn)電機(jī)控制芯片
在關(guān)于旋轉(zhuǎn)執(zhí)行器的本教程中,我們研究了有刷和無(wú)刷直流電動(dòng)機(jī),直流伺服電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī),它們是機(jī)電致動(dòng)器,可用作位置或速度控制的輸出設(shè)備。
責(zé)任編輯:lq
-
控制電路
+關(guān)注
關(guān)注
82文章
1709瀏覽量
135866 -
直流電動(dòng)機(jī)
+關(guān)注
關(guān)注
7文章
196瀏覽量
22841 -
步進(jìn)電動(dòng)機(jī)
+關(guān)注
關(guān)注
0文章
60瀏覽量
12767
原文標(biāo)題:最全直流電機(jī)工作原理與控制電路解析(無(wú)刷+有刷+伺服+步進(jìn))
文章出處:【微信號(hào):wwygzxcpj,微信公眾號(hào):電機(jī)技術(shù)及應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
電磁式直流電動(dòng)機(jī)是什么?它具有什么特點(diǎn)?
直流電動(dòng)機(jī)基本構(gòu)造是什么?分類(lèi)有哪些?
無(wú)刷直流電動(dòng)機(jī)調(diào)速的實(shí)現(xiàn)
直流電動(dòng)機(jī)的工作特性
直流電動(dòng)機(jī)與三相異步電動(dòng)機(jī)的區(qū)別
直流電動(dòng)機(jī)定子的作用及其重要性
直流電動(dòng)機(jī)的勵(lì)磁方式有哪些
直流電動(dòng)機(jī)的構(gòu)造與特點(diǎn)
并勵(lì)直流電動(dòng)機(jī)勵(lì)磁繞組與什么并聯(lián)
無(wú)刷直流電動(dòng)機(jī)的故障模式
直流電動(dòng)機(jī)降低轉(zhuǎn)速常用哪幾種方法
有刷直流電動(dòng)機(jī)的轉(zhuǎn)子類(lèi)型有哪些
無(wú)刷直流電動(dòng)機(jī)故障模式仿真及試驗(yàn)驗(yàn)證研究
如何改變直流電動(dòng)機(jī)的轉(zhuǎn)向呢?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論