 基于單片機和RS-485總線技術實現勵磁電源控制系統的設計
基于單片機和RS-485總線技術實現勵磁電源控制系統的設計
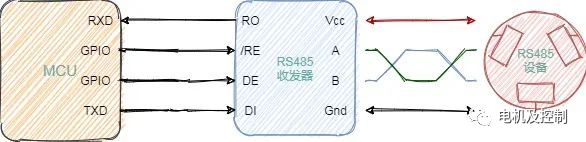
勵磁調節系統是同步發電機一個十分重要的組成部分,其主要任務是向同步發電機的勵磁繞組提供一個可調的直流電流或電壓,從而控制機端電壓的恒定,以滿足發電機正常發電的需要。近年來,微機勵磁調節器以其硬件結構簡單、清晰、設備通用性好、標準化程度高、軟件靈活、能夠方便實現多種功能和滿足各種控制規律的要求等優點,在許多電力工業得到了廣泛的應用。但是,單微機勵磁系統各環節可靠性再高,發生故障的可能仍然存在,為確保勵磁系統的可靠運行,微機勵磁調節器應提供網絡化的可靠的通信接口,使遠方的調度員或廠級工作人員能方便自如的開停機、升速升壓、并網、調整功率(包括有功和無功)等操作。為此,本文采用一臺工控機作為上位機,通過多個RS-485工業控制總線實現對多臺勵磁電源的電流預置及數據采集。使用微機勵磁系統實現本地電流控制、勵磁電源狀態監控以及數據的采集,通過RS-485通訊口進行遠程通信,從而構成了一個完整的勵磁電源控制系統。
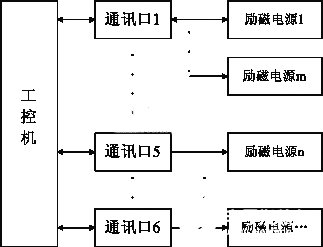
圖1 控制系統結構圖
根據實際需要,勵磁電源控制系統的上位機采用工控機,使用了RS-485工業插卡,共有6個通訊口,而后面的多臺勵磁電源分配在這6個通訊口中,由工控機集中控制。下位機由單片機及其它數字電路系統組成。該系統的結構圖如圖1所示。
2 微機勵磁系統主回路
微機勵磁調節器隨勵磁電源運行工況的變化改變可控硅的導能控制角,從而達到自動調節發電機勵磁電流的目的,保證勵磁電源能輸出穩定的負載電壓。
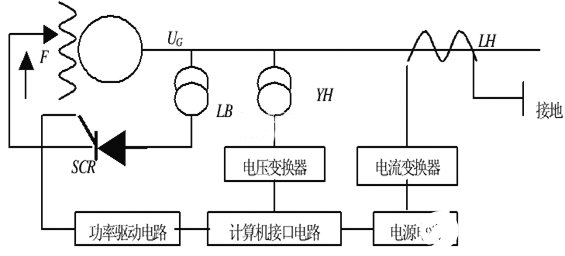
圖2 勵磁系統接線圖
勵磁系統主回路接線方式如圖2所示,勵磁電源取自發電機出口母線,經勵磁變壓器LB將發電機電壓變至合適的值供整流裝置整流后供給發電機轉子繞組。整流電路采用三相橋式全控整流電路[1],該電路的工作特點是,既可工作于整流狀態,將交流變成直流作為發電機勵磁電源,也可工作于逆變狀態,將直流變成交流,實現逆變滅磁,釋放勵磁繞組的能量,從而達到保護發電機的目的。發電機機端電壓、定子電流分別經變壓器YH、電流互感器變換LH變換為二次值再經A/D送至單片機,通過計算機運算后輸出控制量來控制晶閘管的導通角,使電壓穩定在允許范圍內。
自并勵勵磁方式發電機端電壓Ud0與勵磁電壓Ud之間的關系為:
![]()
其中:Xk-交流回路電抗;
ΔU—橋臂元件導通時的正向壓降;
r—回路電阻。
ΔU如果忽略換相電抗和整流元件壓降的影響,則機端電壓與勵磁電壓的關系為:
![]()
由此式可知,勵磁電壓Ud與機端電壓Ud0成正比。
3 微機勵磁調節器的硬件構成

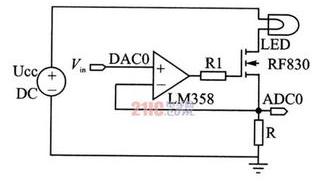
圖3 勵磁調節器原理圖
微機勵磁調節器由單片機和供電電源監控、D/A控制、A/D采集等組成,其硬件框圖如圖3所示。
AT89C52的I/O端口經過隔離后對勵磁電源工作電源進行監控,以及對調壓模塊的工作電壓進行控制。
系統中的D/A控制系統是勵磁電源工作時調整電流的基礎通道,選用了MAXIM公司的MAX536芯片。D/A控制系統需要二個通道,分別控制勵磁電源電壓基準和調相電壓基準。
勵磁電源系統的數據監控需要兩路A/D。其中一路A/D通過采集勵磁電源主系統中的取樣電阻上的工作電壓,而使主控室的控制人員能夠知道每一臺勵磁電源的工作狀態是否正常。另外一路A/D對調整管電壓進行監控。A/D芯片采用MAXIM公司的MAX197多量程、12位數據采集系統(DAS)。A/D系統與D/A系統一起構成閉環控制系統,達到調節可控硅的導通角的目的。
4 微機勵磁調節器的軟件設計
微機勵磁調節器軟件采用模塊化結構設計,各種功能都由相應的子程序來完成,
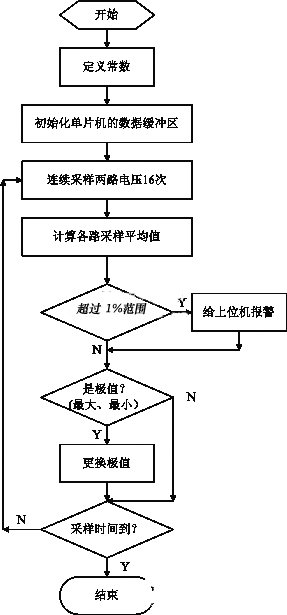
圖4勵磁電源加載過程程序框圖
軟件系統是通過上下位機分工配合實現的。下位機監測現場的工作狀態,進行數據的采集和初步處理。上位機采用工業PLC作遠程監控。單片機在勵磁電源中擔負著提供基準電壓、控制調整管電壓、工作數據采集、監視勵磁電源工作狀態以及與上位工控機進行通信、回送勵磁電源工作狀態及工作數據等功能。
為實現精確調節同步發電機的機端電壓和控制同步發電機的無功功率,勵磁調節器必須連續比較機端電壓實際值與給定值,并實時改變可控硅的控制角,保證勵磁電壓對工況的變化做出快速反應。其流程如圖4所示。
調節器上電后執行初始化和自檢,初始化結束后,表明勵磁調節器已經準備就緒,接著程序進入起勵的設置和起勵條件的判別,然后進入主程序。首先是數據采集和處理部分;主要由電機出口交流電壓采樣子模塊、電機出口交流電流采樣處理子模塊和勵磁電壓采樣處理子模塊三部分組成。然后進入功率因數測算模塊和PID調節模塊;其中,采用數字濾波的方式求得功率因數cosφ,再通過PID調節計算出可控硅的導通角。
由于勵磁控制系統比較復雜,需要測量的量比較多,因此該系統電壓及電流的采集,使用直流采樣法和數字PID控制調節法。PID調節計算根據采集的數據結果與額定值進行比較,從而進行PID調節計算出可控硅的觸發角α;PID算法采用了一種智能受模態控制規律,根據系統偏差信號的大小、方向及變化趨勢做出相應的決策,以選擇適當的控制模式進行控制,具有良好的適應能力和極強的魯棒性。頻率的測量是把輸入的波形通過運放變成一個方波,該方波通過二極管削去負半部分,最后進入單片機的高速輸入口。
在工作數據采集中,為了消除一次采集過程中可能受到的隨機干擾的影響,采用了取平均值的方法。這樣經過6秒的采集過程以后,在單片機的數據緩沖器中便存放了該電源此次工作時的最大和最小有效值,使工控機以后可以查尋。工作時的數據采集流程如圖5所示。
5 抗干擾設計

圖5勵磁電源數據采集過程程序框圖
由于系統的單片機及其它數字電路系統與其他的模擬高電壓、大電流的器件共同放在一個機箱中,系統的工作環境是比較惡劣和復雜的,其應用的可靠性、安全性就成為一個非常突出的問題。為保證測控系統長期、穩定、可靠的運行,現就影響測控系統可靠、安全運行的主要因素和解決方法說明如下。
5.1 數據采集誤差加大
干擾侵入測量單元模擬信號的輸入通道疊加在有用信號之上,會使數據采集誤差加大,由于系統的測量精度較高,干擾顯得更加嚴重。
針對此問題,從硬件和軟件兩方面進行考慮和解決。①硬件方面:在集成電路及采集通道上使用電容,以減少電源的干擾;其次,信號的采集連接線使用屏蔽線,使采集信號在傳送過程中不會受到外界的干擾。②軟件方面:采用數字濾波法,由于系統的干擾是隨機干擾,且被測參數變化較慢,可以用數字濾波(就是通過一定的軟件程序降低干擾信號)的方法加以抑制或濾除。
5.2 控制狀態失靈與程序運行失常處理
控制狀態失靈與程序運行失常主要采用了以下方法:①系統采用浮地設計;②使用軟件攔截技術(指令冗余,軟件陷阱);③單片機采用電源監視及“看門狗”電路;④對數字電路進行屏蔽;⑤負載輸出隔離。
在整個系統中,單片機與外界功率開關器件采用隔離驅動方式,隔離電路模塊將控制電路模塊、主勵磁電路模塊互相隔離。這樣進行設計主要是避免引起災難性的后果。雖然隔離驅動可分為電磁隔離和光電隔離兩種方式,由于本文所需產生的勵磁頻率低頻在4Hz,高頻在100Hz左右,對于光電隔離共模抑制能力差,傳輸速度慢的缺點不重要;同時由于光電隔離具有體積小,結構簡單等優點,而且可以減少干擾,所以本系統采用光電隔離方式。隔離元件采用TLP521光電耦,與光電耦相連的單片機的兩個引腳的PWM波形通過兩個470Ω的電阻分別與兩個光電耦相連,同時控制單片機的兩個引腳交互輸出高低電平,從而使得在勵磁線圈上得到正反雙向電壓。周而復始,在勵磁線圈上產生與單片機相應引腳上相同頻率的波形,只是幅度不一樣而已。同時在下位機中專設了延時0.01ms的程序進行軟件延時,目的是為了更進一步保證功率管在工作時不會發生重疊導通以造成損壞,增加可靠性。
6 結束語
本文詳細介紹了基于工控機和單片機的具有網絡化控制功能的勵磁調節器系統,實現了調度員或廠級工作人員能夠遠程控制系統的開停機、升速升壓、并網、調整功率(包括有功和無功)等操作。
本文作者創新點是:討論了基于上位機(PLC)和下位機(AT89C52單片機)串行通訊來實現勵磁調節器調節的工作原理和方法,并給出了上位機和下位機的程序結構。經實踐證明,在勵磁電源的現場實際調試及使用中達到了預期的效果,該系統能夠長期穩定、可靠的運行。
責任編輯:gt
-
電源
+關注
關注
184文章
17769瀏覽量
250713 -
接口
+關注
關注
33文章
8638瀏覽量
151375 -
發電機
+關注
關注
26文章
1645瀏覽量
67732
發布評論請先 登錄
相關推薦
采用CAN總線與RS-485實現DSP通信接口
怎么實現基于RS-485總線的遠程測控系統的設計?
3個理由了解為什么CAN總線與RS-485更好
基于RS-485總線的溫室環境控制系統研制
RS-485智能串行通信接口的設計
基于RS-485總線的LED夜景照明控制系統設計
基于RS-485總線實現智能斷路器控制系統的設計

RS-485總線之收發器與數據鏈路基礎知識介紹





 工商網監
工商網監
評論