 感應電動機的三種運行狀態
感應電動機的三種運行狀態
感應電動機原理說明
感應電動機又稱“異步電動機”,是將轉子置于旋轉磁場中,在旋轉磁場的作用下,獲得一個轉動力矩,因而轉子轉動的裝置。轉子是可轉動的導體,通常多呈鼠籠狀。由電氣工程師尼古拉·特斯拉于1887年發明。詞條介紹了感應電動機的概念、發明者、工作原理、基本結構、工作方式、制動方式、異步特征、規格以及故障檢查。
通過定子產生的旋轉磁場(其轉速為同步轉速n1)與轉子繞組的相對運動,轉子繞組切割磁感線產生感應電動勢,從而使轉子繞組中產生感應電流。轉子繞組中的感應電流與磁場作用,產生電磁轉矩,使轉子旋轉。由于當轉子轉速逐漸接近同步轉速時,感應電流逐漸減小,所產生的電磁轉矩也相應減小,當異步電動機工作在電動機狀態時,轉子轉速小于同步轉速。為了描述轉子轉速n與同步轉速n1之間的差別,引入轉差率(slip)。
感應電動機的制動方式
三相感應電動機電氣制動方式 [6] 有:能耗制動、反接制動、再生制動三種。
(1)能耗制動時切斷電動機的三相交流電源,將直流電送入定子繞組。在切斷交流電源的瞬間,由于慣性作用,電動機仍按原來方向轉動,這種方式的特點是制動平穩,但需直流電源、大功率電動機,所需直流設備成本大,低速時制動力小。
(2)反接制動又分負載反接制動和電源反接制動兩種。
1)負載反接制動又稱負載倒拉反接制動。此轉矩使重物以穩定的速度緩慢下降。這種制動的特點是:電源不用反接,不需要專用的制動設備,而且還可以調節制動速度,但只適用于繞線型電動機,其轉子電路需串入大電阻,使轉差率大于1。
2)電源反接制動當電動機需制動時,只要任意對調兩相電源線,使旋轉磁場相反就能很快制動。當電動機轉速等于零時,立即切斷電源。這種制動的特點是:停車快,制動力較強,無需制動設備。但制動時由于電流大,沖擊力也大,易使電動機過熱,或損傷傳動部分的零部件。
(3)再生制動又稱回饋制動,在重物的作用下(當起重機電動機下放重物),電動機的轉速高于旋轉磁場的同步轉速。這時轉子導體產生感應電流,在旋轉磁場的作用下產生反旋轉方向轉矩,但電動機轉速高,需用變速裝置減速。
感應電動機的三種運行狀態
感應電動機的三種運行狀態是電動機運行狀態、發電機運行狀態和電磁制動運行狀態。
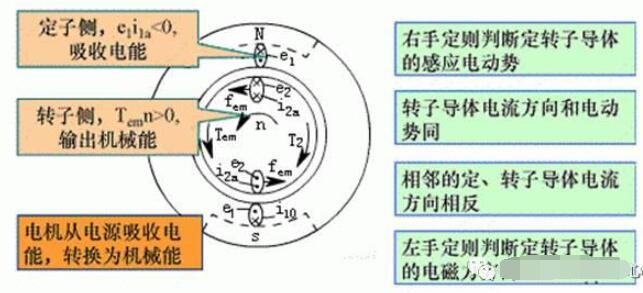
一、電動機的運行狀態
感應電動機的定子邊接電源后,便在氣隙中產生旋轉磁場,以同步轉速n1旋轉。通過電磁感應作用,便產生電磁轉矩作用在轉子上,轉子便在電磁轉矩的作用下轉動起來,轉速為n,轉向與n1的轉向相同,這樣就可以從轉軸上向外輸出機械功率。此時電機便是從定子邊輸入電能,從轉子邊輸出機械能,感應電動機的這種運行狀態稱為電動機運行狀態。
作為電動機運行狀態時,一定要滿足
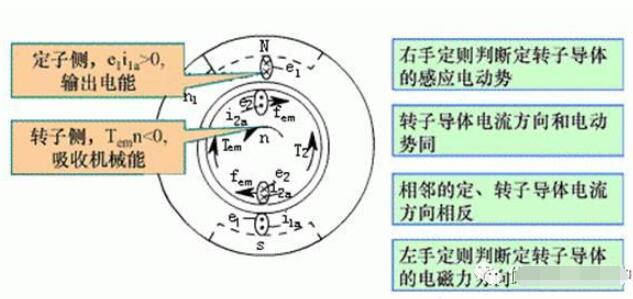
二、發電機運行狀態
如果用原動機拖動感應電動機的轉子,沿著原來電動機運行狀態時的方向加速,當轉子轉速n高于同步轉速n1,即n》n1時,氣隙旋轉磁場切割轉子導條的方向與電動機運行狀態時相反了,導條中的感應電勢和電流的方向以及產生的電磁轉矩的方向也反了,這種情況下,電磁轉矩對原動機來說是一個制動轉矩,要保持電動機轉子繼續轉動,原動機必須給電動機輸入機械功率。另一方面,由于轉子電流方向的改變,也引起定子電流方向的改變,于是定子邊不再從電網輸入電功率,而是變為向電網輸出電功率。這樣,感應電動機的運行狀態是從轉子邊輸入機械功率,從定子邊輸出電功率。這種把機械能轉變為電能的運行狀態,稱為感應電動機的發電機運行狀態。
作為發電機的運行狀態時,一定要滿足n》n1或S》1的條件。
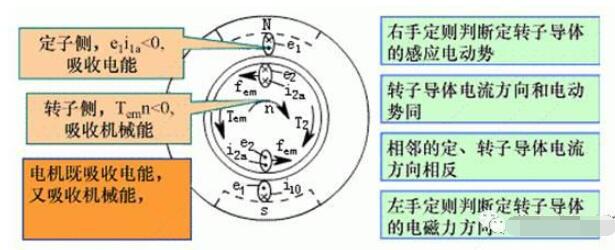
三、電磁制動運行狀態
如果用外加轉矩拖動感應電動機的轉子,逆著原來電動機運行狀態時的方向轉動,則轉子中的感應電動勢和電流的方向仍然與原來電動機運行狀態時的一樣,作用在轉子上的電磁轉矩的方向也就與原來電動機運行狀態時的一樣,但是,與轉子的轉向相反了,亦即與外加轉矩的方向相反了,此時電磁轉矩成為制動轉矩。為了克服這個制動轉矩,維持轉子的繼續轉動,外加轉矩必須對轉子供給機械功率。這樣,感應電動機從定子邊輸入電功率,從轉子邊輸入機械功率。感應電動機的這種運行狀態稱為電磁制動運行狀態。
作為電磁制動運行狀態時,一定要滿足n《0或s》1的條件。
責任編輯:YYX
-
電動機
+關注
關注
74文章
4110瀏覽量
96356 -
感應電動機
+關注
關注
0文章
59瀏覽量
9123
發布評論請先 登錄
相關推薦
單相感應電動機維護與故障排除指南







 工商網監
工商網監
評論