


這學期開設的51單片機課程的課程設計即將驗收,今天開始正式著手做循跡小車~
一. 任務要求
二. 系統原理
本系統以設計題目的要求為目的,采用STC89C52單片機為控制核心,利用紅外傳感器檢測軌道,控制電動小汽車的自動循跡,快慢速行駛。
這里的軌道是指汽車沿著白色地板上的黑線行駛。由于黑線與白地板的反射系數不同,可以根據接收到的反射光的強度來判斷“道路”。常用的方法是紅外檢測。
紅外檢測方法,即在汽車行駛過程中,利用紅外光在具有不同顏色的物體表面的不同反射特性,不斷向地面發射紅外光。當紅外光與白紙地板相遇時,會發生漫反射,反射光被安裝在車內的接收器接收,如果遇到黑線,就會變成紅色。外部光被吸收,車內的接收器不能接收紅外線。單片機根據是否接收到反射的紅外光來確定黑線的位置和汽車的行駛路線。
三. 整體方案
1. 控制模塊
小車的核心控制部件采用STC公司生產的8位單片機STC89C52。它是一種低功耗、高性能CMOS8位微控制器,具有8K字節系統可編程Flash存儲器。STC89C52使用經典的MCS-51內核,但是做了很多的改進使得芯片具有傳統51單片機不具備的功能。STC89C52有3個16 位定時器/計數器,2個外部中斷,1個串口中斷。
最小系統
51單片機的具體引腳功能不細說,不了解的可自行百度。直接上最小系統電路圖(自己畫的,湊合著看)。順便說一句,在我看來一個沒有指示燈的電路是最煩的電路<(`^′)> 我的復位一定要有燈才行!
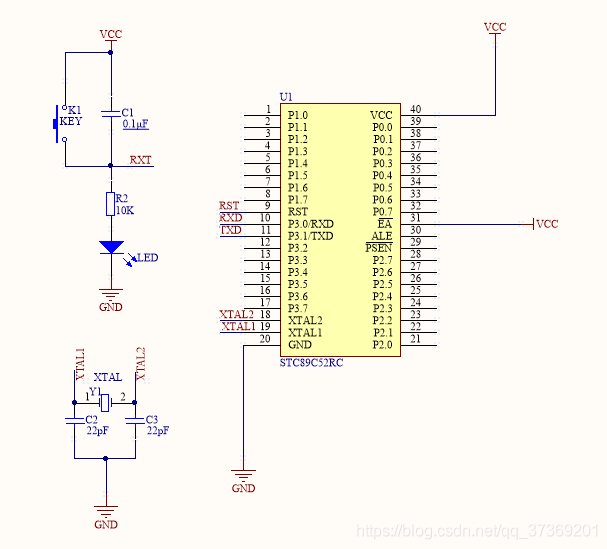
三部分:
①電源電路:給單片機提供5V的電源
②時鐘電路:外接11.0592M石英晶振。
③復位電路:確保單片機是從一個確定的初始狀態開始。
焊接時注意P0口要接上拉電阻,否則不能用,一般都用排阻做上拉電阻(當然如果能自己畫板子就更好了)。
去除AD網格線
記一下怎么去除AD網格線,如圖步驟,最后去掉Visible前面的對勾即可,別忘記最后點OK:
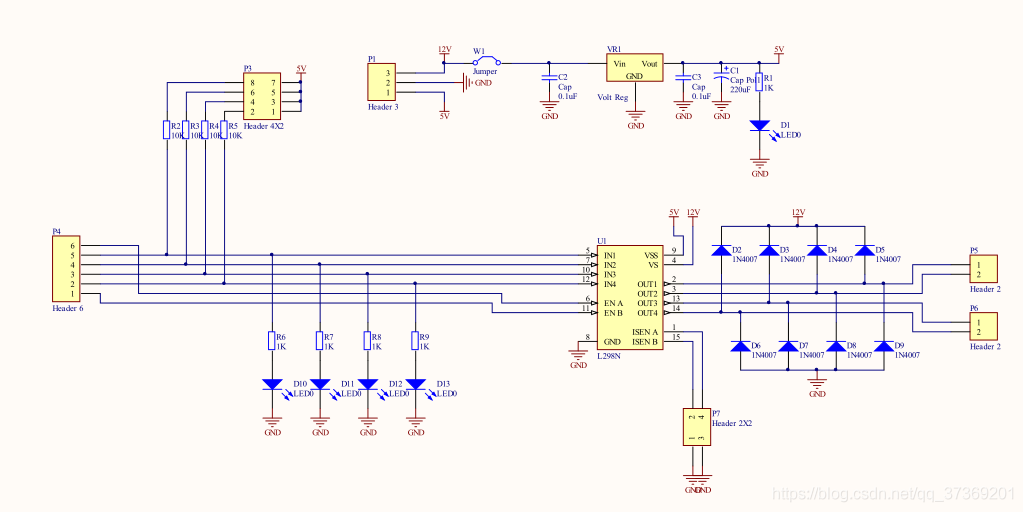
2. 電機驅動模塊
我使用的是最經典的LM298N電機驅動:
我太喜歡用298了。不僅可以接至12v(即擁有更強的驅動能力),而且有過電流保護功能,當出現電機卡死時,可以保護電路和電機等。且自帶7805降壓模塊可直接給單片機供電~~
實物圖:
驅動與各部分的連接簡介:
輸出A、B:分別接到左右馬達上,通過使能A、使能B來控制電機正常工作(接高電平為正常工作);
單片機IO控制輸入(即IN1-IN4):用來控制馬達正反轉。接單片機引腳,通過在程序中給引腳高低電平實現正轉或反轉(詳見下邊輸入輸出關系表);
12V輸入:接電池盒正極;
5V輸入:接單片機VCC,給單片機供電;
電源地(即GND):把電池盒負極和單片機的GND一起接入。
輸入輸出關系(使能ENA、ENB均為1的狀態下):
3. 電源模塊
我自己使用的是兩節18500鋰電池供電。如果覺得兩節電池不夠,三節12V又太大,也可以在中間加一個7809穩壓管把電壓降到9V再接入驅動:
4. 循跡模塊
光電循跡是由四對紅外收發管組成,通過檢測接收到的反射光強,判斷黑白線。
當模塊探測燈檢測到黑線時指示燈熄滅,同時 OUT端口持續輸出高電平信號,反之未檢測到黑線的探測燈應常亮,OUT端口輸出低電平。該模塊檢測距離 2~60cm,檢測角度 35 ° ,檢測距離可以通過電位器進行調節,順時針調電位器,靈敏度增加;逆時針調電位器,靈敏度減少。
原理圖由紅外對管和電壓比較器兩部分組成,紅外對管輸出的模擬電壓通過電壓比較器轉換成數字電平輸出到單片機。
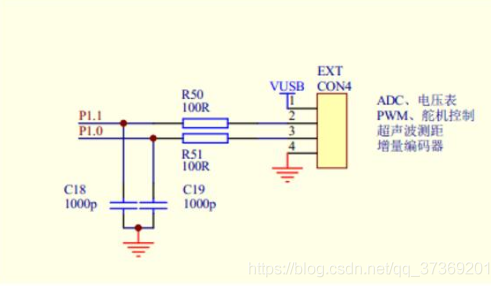
主控板的電路圖:
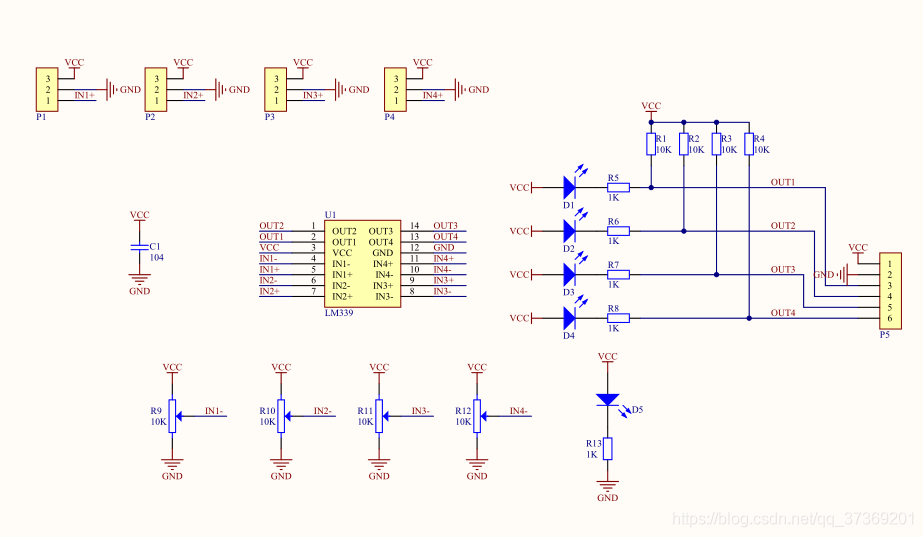
小板電路圖:
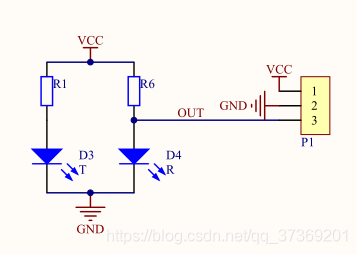
注意連接的時候:VCC-VCC、GND-GND、IN-OUT。
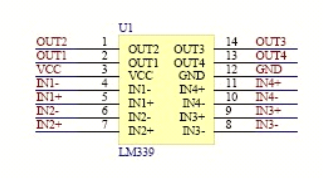
比較器LM339
5. 超聲波測距模塊
實物圖:
電路圖:
工作原理:
(1)采用IO口TRIG觸發測距,給至少10us的高電平信號;
(2)模塊自動發送8個40khz的方波,自動檢測是否有信號返回;
(3)有信號返回,通過IO口ECHO輸出一個高電平,高電平持續的時間就是超聲波從發射到返回的時間。
測試距離=(高電平時間*聲速(340M/S))/2;
四. 車體實物圖
五. 軟件實現
#include
責任編輯:lq
-
51單片機
+關注
關注
277文章
5711瀏覽量
127528 -
控制模塊
+關注
關注
2文章
138瀏覽量
19313 -
紅外傳感器
+關注
關注
9文章
545瀏覽量
48396
原文標題:基于51單片機四路循跡小車
文章出處:【微信號:gh_c472c2199c88,微信公眾號:嵌入式微處理器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
51單片機中為什么很少出現printf的身影

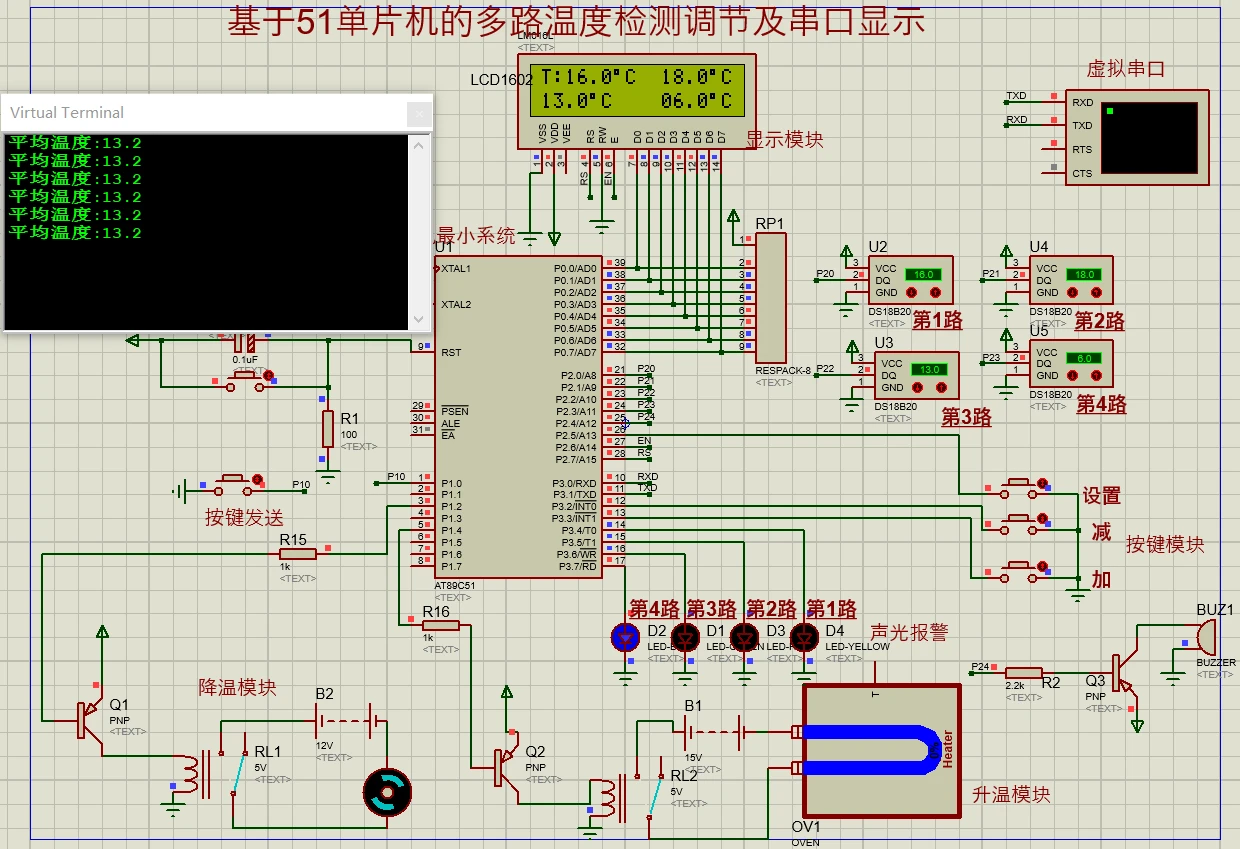
基于51單片機的多路溫度檢測調節及串口顯示
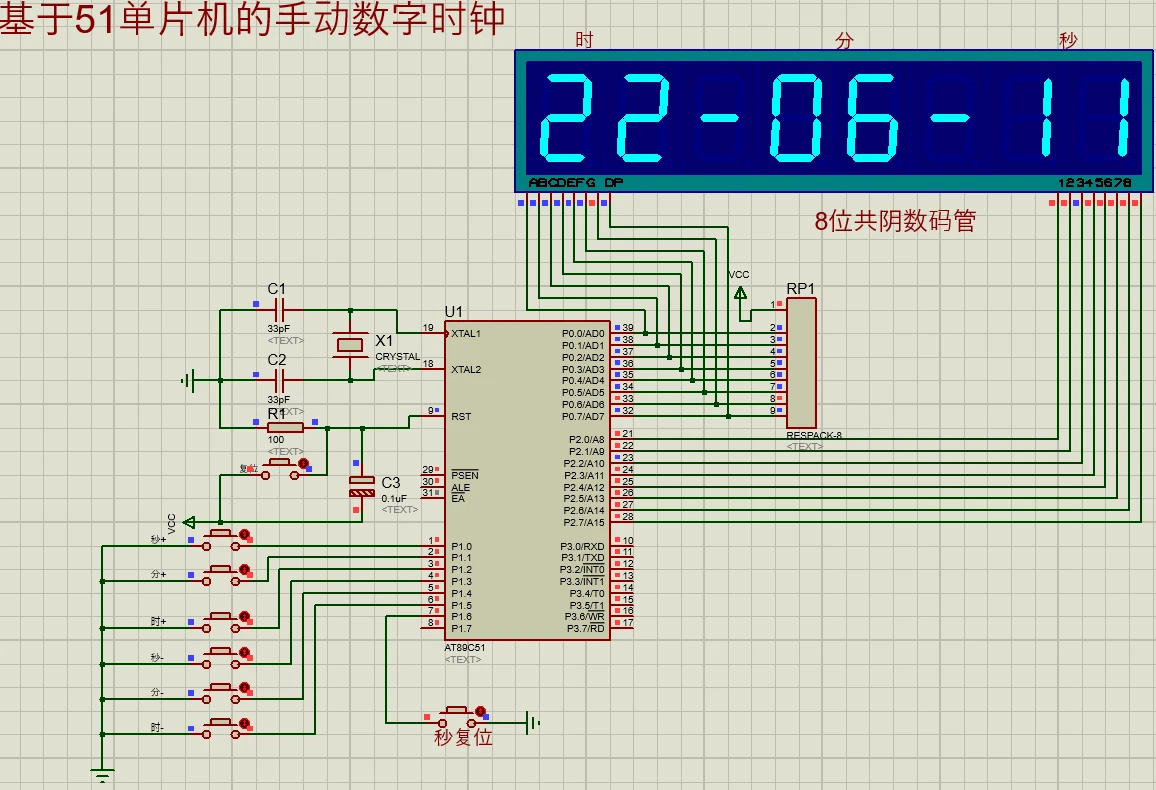
基于51單片機的手動數字時鐘
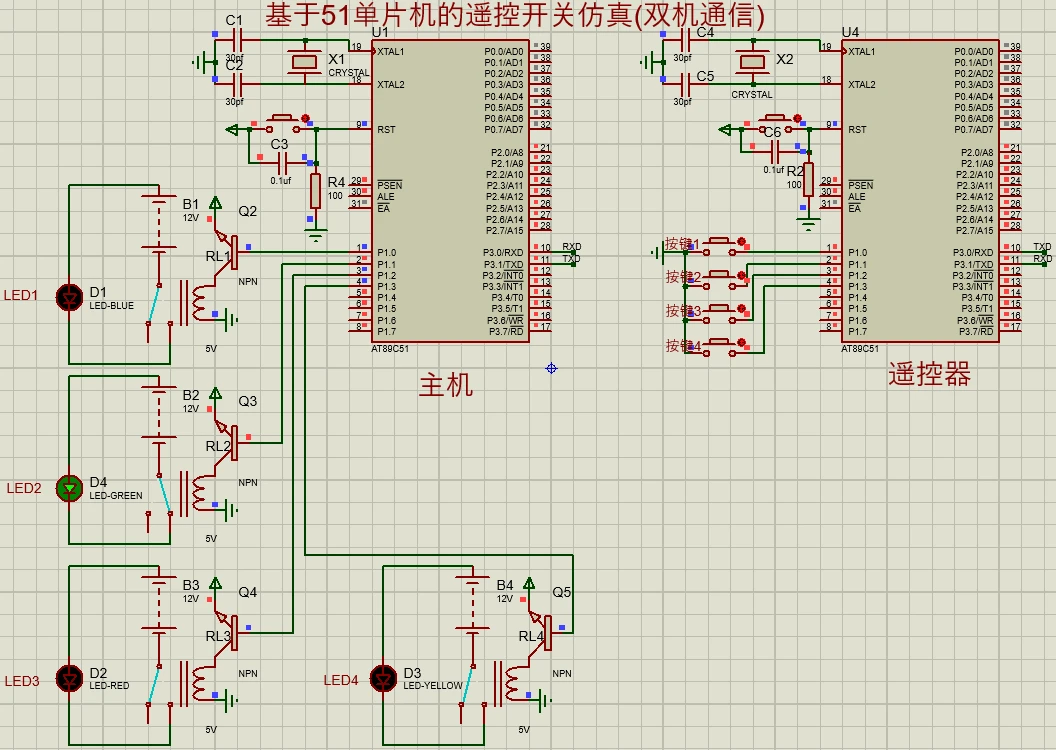
基于51單片機的遙控開關仿真(雙機通信)
如何實現51單片機與PC機的串行通信
51單片機燒錄軟件怎么用
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析

第19.1 章-星瞳科技 OpenMV視覺循跡功能 超詳細OpenMV與STM32單片機通信
20.3-使用兩個通道進行電磁循跡 智能車競賽 電磁桿原理圖 電磁循跡小車 STM32電磁小車 電磁循跡算法






 工商網監
工商網監

評論