 歐卡智舶發布全球首個城市內河無人駕駛數據集
歐卡智舶發布全球首個城市內河無人駕駛數據集
歐卡智舶技術專題發布
最近,歐卡智舶聯合清華大學與西北工業大學的研究學者公開了一個針對真實內河水域場景下多傳感器、多天氣條件下的內河無人船數據集USVlnland 。為無人船及水面自動駕駛領域相關研究者提供一個平臺和基準,推動解決內河無人船在真實場景應用中面臨的挑戰。
近年來,內河無人船因其潛在的應用價值而受到廣泛關注,不同于海面無人船和路面自動駕駛場景,內河行駛的無人船的定位和感知面臨著獨特的挑戰。歐卡智舶聯合清華大學與西北工業大學的研究學者于近日公開了USVInland數據集,該數據集是第一個內河場景下多傳感器的無人船數據集,旨在促進無人船領域相關研究,數據集論文已經被IEEE Robotics and Automation Letters (RA-L) 接收,并將在IEEE International Conference on Robotics and Automation (ICRA) 2021上進行展示。
背景介紹隨著自動駕駛技術的發展,自動駕駛場景逐漸由路面擴展至水上,無人船(Unmanned Surface Vehicle,USV)及其相關應用成為近年來研究熱點之一。其中,內河無人船具有極大的應用價值,如內河自主運輸,測繪,水質檢測,和河道垃圾清理等。不同于海面無人船,內河相對狹窄和復雜的環境,對無人船的定位和感知帶來了新的挑戰。
在狹窄的內陸水道中,GPS信號有時會由于河岸植被、河道旁建筑以及橋梁的遮擋而減弱。在這種情況下,內河航道的準確定位與導航,依賴于對無人船與周圍環境的感知。此外,內河場景更為復雜,必須確保無人船與河岸和其他障礙物保持安全距離。因此,與道路上的自動駕駛類似,基于激光雷達、相機和毫米波雷達等傳感器的同步定位與建圖(SLAM)、立體匹配和水岸分割等任務被引入到內河無人船的應用中。
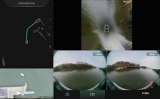
而在內河中,水面上的霧和強光反射會降低激光雷達探測精度;對于視覺系統,水面霧氣和強光反射,岸邊物體的反射和雨滴引起的漣漪也會帶來干擾。此外,不同于路面車輛,水面上船只的橫向漂移較大,船只的運動模型更為復雜,給精確定位帶來新的挑戰。因此,對于內河無人船,路面自動駕駛的通用策略是不可行的。 在路面自動駕駛領域,近年來涌現出了如KITTI,Oxford RobotCar,nuScenes等公共數據集,大大促進了路面自動駕駛領域相關技術的發展。而無人船領域的公開標準數據目前還相對缺失。 數據集介紹USVInland是第一個真實場景下多傳感器、多天氣條件下的內河無人船數據集。在不同的內陸河道場景中,共采集了27段原始數據,總行駛距離超過26公里,發布的數據中包含了SLAM、立體匹配和水岸分割三項任務。
數據采集平臺搭載的傳感器包括激光雷達,雙目相機,以及GPS和IMU幾種自動駕駛領域常用傳感器。除此以外,采集平臺上還配備了三個毫米波雷達提供周圍環境點云數據。與圖像和激光雷達相比,毫米波雷達對天氣以及光照條件的魯棒性更強,能提供多普勒速度信息,且成本較低,近年來在自動駕駛領域應用廣泛。不同傳感器之間完成了時間同步和空間標定。
受KITTI的啟發,USVInland數據集引入了SLAM、立體匹配和水岸分割任務。對已有的常用算法,如SLAM中的LOAM,Lego-LOAM,ORB-SLAM,立體匹配中的SGBM,以及用于水岸分割的語義分割網絡DeepLab v3+,文中給出了在內河場景數據集上的實驗結果。結果表明,受到內河特殊場景的影響,常用算法的性能無法滿足內河無人船安全行駛的需求。
總結針對內河無人船實際應用的需求,研究者構建了第一個多傳感器、真實場景下內河無人船數據集USVInland。期待通過該數據集的發布,為無人船及水面自動駕駛領域相關研究者提供一個平臺和基準,推動解決內河無人船在真實場景應用中面臨的挑戰。USVlnland主要被設計用于提升無人船在真實內河水域場景下的各項作業能力,USVlnland也是國內首個內河水面無人駕駛數據集,對于國內內河水面無人駕駛技術的發展具有劃時代的意義。現在,歐卡智舶已經把 USVlnland數據集免費開放給全球各個國家的技術研究者使用,期待 USVlnland 能夠啟發更多研究人員進行真實內河水域場景下無人船發展的研究。
原文標題:行業動態 || 重磅!歐卡智舶發布全球首個城市內河無人駕駛數據集
文章出處:【微信公眾號:機器人夢工廠】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
傳感器
+關注
關注
2550文章
51041瀏覽量
753098 -
無人駕駛
+關注
關注
98文章
4054瀏覽量
120451
原文標題:行業動態 || 重磅!歐卡智舶發布全球首個城市內河無人駕駛數據集
文章出處:【微信號:Xbotpark,微信公眾號:機器人夢工廠】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
首鋼水廠鐵礦無人駕駛礦卡實現常態化無人運行
城市內澇在線監測預警系統解決方案

低速無人駕駛清掃機器人無線充電解決方案
無人駕駛出租車新時代即將到來?
特斯拉推出無人駕駛Model Y
特斯拉Robotaxi即將發布,無人駕駛新紀元開啟
易控智駕無人駕駛項目落地紅沙泉露天煤礦
文遠知行無人駕駛掃路機在廣東汕頭落地
百度開放車道級地圖數據,助力高級駕駛與無人駕駛
NVIDIA AI賦能水面自動駕駛技術,實現多種標準落地應用
文遠知行發布無人駕駛掃路機S1!當日獲千萬美金訂單!

吉利完成全球首個汽車無人駕駛漂移,擬明年啟用AI數字底盤技術

無人駕駛礦卡整體解決方案(5g物聯網通信方案)






 工商網監
工商網監
評論