 如何配置基于激光的3D三角測量系統以及如何設置激光線參數
如何配置基于激光的3D三角測量系統以及如何設置激光線參數
從汽車和電子制造到木材加工,許多行業都會采用基于3D三角測量法的機器視覺系統。雖然使用三角法進行測量的概念并不復雜,但在系統實施的過程中,有許多關鍵的細節必須解決,包括如何配置基于激光的3D三角測量系統以及如何設置激光線參數。
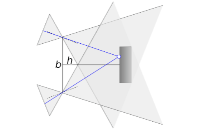
在基于激光的三角測量系統中,將一條狹窄的光帶投影到3D表面,在非投影器的觀察視角將會看到一條呈現扭曲的光線 (圖1)。分析這些光線圖像的形狀,其結果可被用來進行物體表面形狀的精確幾何重構。
圖1:從投射器以外的視角看到出現扭曲的激光線。這種失真被用來推導被測物的尺寸。
在一個3D三角測量系統中有4個重要的組成部分:攝像機、結構激光器、在整個拍攝視場中移動被測物或攝像機/激光器系統的機械結構、以及一款能夠處理圖像并能精確將像素位移轉換成高度差異的圖像軟件。
三角測量結構
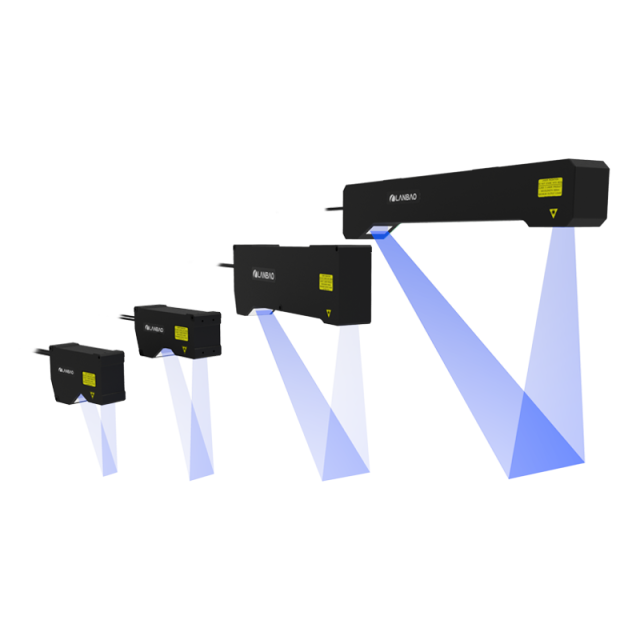
激光線投影系統有許多種不同的實現方式,每一種都有其獨特的優缺點。圖2展示了4種最常見的幾何結構。
圖2:4種常見的基于3D三角測量法的機器視覺系統配置。
在最常用的標準幾何結構中 (Standard Geometry),激光線被垂直投射在名義上的測量 (X,Y) 平面內。這種結構最重要的特點就是被測物上沿投射光線的高度變化不會改變光線的Y軸坐標值。這將簡化后續推導被測物形狀所需的計算,從而更加快速準確的搭建系統并簡化安裝過程中的標定。
標準幾何結構的一個缺點是攝像機從某個非垂直的角度拍攝被測物,這增加了對景深的要求,即使被測物的高度發生變化也必須保持聚焦。這也意味著隨著高度 (從鏡頭到被測物的距離) 的變化,鏡頭要具備更大的放大倍率。因此,必須對被測物進行標定才能使系統推導出精確的測量結果。
這種方法會出現兩個問題。首先,只要亮度被整條光束的長度平均掉,它就無法體現光束最大的絕對功率變化。其次,它忽略的恰好是通常表現最糟糕的光束邊緣部分。
為了避免這些缺陷,相干公司為光束均勻度制定了嚴格的標準,基本上囊括了整條光束。具體而言,光束邊緣被定義為光束功率下降至功率歸一化峰值的80%的位置。光束亮度的平均值必須保證覆蓋整個區域且在此區域內絕對功率值不能降低到低于峰值的75% (見圖3)。和定義為光束指定區域內的平均值相比,這是更為嚴格的均勻性要求。
圖 3:亮度積分vs.激光線的位置 ,標識峰值亮度 (Imax)、最小亮度 (IMin)、平均亮度 (IAvg) 及80%峰值功率。
這種更為嚴格的定義為系統開發者提供了兩個重要的優勢。第一,對于現有的設備和放射健康中心 (CDRH) 安全分類來說,其生成的投射光線的功率更高,這將在采集的圖像中直接轉化為更好的信噪比 (SNR),從而產生一個更快速更精確的視覺系統。這是因為CDRH分類僅僅基于峰值功率,而不考慮峰值出現在光束的哪個位置。因此,如果功率峰值出現在光束邊緣 (這種情況經常發生),而光束中間部分的功率值相對非常低,則安全分類將會基于較高的值。
其次,符合這個規范將提高單元間的均勻性,對于系統集成商來說這將使產品的標定和維持系統的穩定性變得更加容易。這是因為在規范中有對絕對亮度下限的定義,相比于簡單的依賴于平均值,這更加嚴格的限制了光束內可出現的差異總量。
激光線寬度
即使不存在制造誤差,在實際工作中,隨著激光和被測物之間距離的變化,激光線聚焦處的光線寬度和長度也會發生變化。此外,這種變化的幅度很大程度上取決于如何使用激光光源生成光線,因此采用何種投射器光學部件對系統性能有著顯著的影響。
大部分光線投射器都基于二極管激光器,二極管激光器具有較大的光源尺寸,且在某一方向 (慢軸) 比垂直方向 (快軸) 的發散更低。這是二極管激光器的固有屬性,正是由于這一事實,其發光面在某個維度比另一維度更長。激光線投射光學部件可被配置成沿快軸或慢軸的方向延展成激光線,且基于這一選擇產生的衍射效應將在3個重要方面影響激光線的性能 (見圖4)。
圖4:變換二極管激光器輸出的慢軸做為聚焦的激光線寬度方向將獲得更寬的光束,但是其景深較大而“領結”效應不明顯。
首先,焦點處較小的線寬可以通過定向輸入激光束實現,使得快軸成為光束的寬度,而慢軸成為其長度。因為更窄的光線寬度能夠提供更高的分辨率和功率密度,從而能夠測量被測物表面更細微的高度變化。
但是衍射效應也會使高度聚焦的狹窄光線比較寬的光線更加快速的擴散到焦點之外。因此,獲得較窄的聚焦線寬 (和更高的分辨率) 必然會犧牲一部分系統景深 (即超過該距離線寬將擴大到不可接受的水平)。
最后,還有一種頗為特殊的效果,即當一個平面被測物垂直于激光光束的光路,光束的邊緣必須比光束中心更遠到達被測物。這是因為在這段額外的距離上光束是發散的,光線寬度會出現邊緣比中心略寬 (假設焦點為光線的中心位置)。這通常被稱為“領結”效應。同樣的,對于快速擴散的光束這種效應更為明顯。
光線平直度
最后一個值得一提的激光線參數是平直度。在現實世界中投射的激光線很少是完全筆直的。最常見的是弓型,有時會出現輕微的“S”型。弓型通常是由于入射激光束以非正常入射角度進入光束整形光學器件而引起的。
因為光線平直度依賴于光學對準,因此在已有系統中,它可能會因為光學單元間的傳輸以及隨時間發生變化。因此,必須將光線的平直度考慮在內才能對系統進行正確標定,從而獲得精確的測量結果。
雖然使用激光三角測量系統采用激光線投射器能夠提供比其他3D視覺技術更高的速度和精度,但是系統簡化容易讓人產生誤解。結果主要取決于幾個系統參數。此外,一些廠商會采用模糊或混淆的方式處理這些參數。因此,了解如何定義系統的關鍵參數非常重要,從而使最終的激光三角測量系統達到最佳的性價比。
責任編輯:lq
-
激光
+關注
關注
19文章
3224瀏覽量
64603 -
測量系統
+關注
關注
2文章
539瀏覽量
41434 -
機器視覺
+關注
關注
162文章
4389瀏覽量
120451
原文標題:基于激光3D三角測量法的理解
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
禾賽科技推出面向機器人領域的迷你3D激光雷達
光學系統的3D可視化
激光3D打印設備的技術優勢
明治案例 | 【±0.1%F·S精度】【點激光位移】3C零件厚度測量

3D激光線掃輪廓傳感器在汽車行業的汽車車縫檢測的應用
激光傳感器怎么調節參數
三角波發生器的組成和應用
3D三維掃描儀的光學測量技術知識
康謀分享|aiSim5激光雷達LiDAR模型驗證方法(二)

激光焊接機在不銹鋼三角閥制造中的應用與發展

華為激光雷達參數怎么設置
珠三角石油工業壓力閥三維掃描逆向3d建模設計服務






 工商網監
工商網監
評論