

摘 要:雙輪差速驅動搬運AGV 在實際運動過程中,由于傳感器讀數誤差和機械傳動誤差會產生運動累積誤差,針對該問題,文中提出一種基于單目視覺的誤差檢測方法。首先采用基于柵格分割、聚類的方法提取二值圖像中的定位塊并使用平均值算法計算定位塊的中心點;然后根據定位塊中心點的相對位置關系建立誤差檢測計算模型;最后通過實驗對本方法進行驗證,位置和航向角檢測結果誤差分別小于1 mm 和1°,證明所述方法具有較高的檢測精度。該方法對硬件要求低,具有較高的實用價值。
0 引言
基于雙輪差速驅動的倉儲物流搬運AGV 結構簡單,控制方便,廣泛應用于各種物流分揀系統(tǒng)中。由于AGV 搭載的傳感器讀數誤差和機械傳動誤差具有累計效應,其誤差會隨著時間的增加而增大。如果不能檢測并消除移動過程中產生的位置累計誤差和航向角累計誤差,將導致導航錯誤。迄今為止,已經有許多在工業(yè)生產中被使用或在實驗室里被設計并證明可用的累計誤差檢測方法。張濤[1] 等人設計了一種基于單目視覺的二維碼導航誤差檢測方法,將定位誤差控制在±4 cm 以內;Arturo Gil 等人[2] 通過提取視覺地標,獲得它們的相對測量值,通過估算機器人的路徑和視覺地標的位置來消除運動過程中的累積誤差;張艷[3] 等人使用DM 二維碼導航方式檢測產生的累積誤差,實現了AGV 自主導航與精準定位;羅高[4] 等人使用里程計結合單目視覺測距對移動機器人誤差檢測和定位技術進行研究;王勇[5]等人通過自適應位姿跟蹤,提高了AGV 在高遮擋環(huán)境下的定位精度。 目前對運動過程中產生的累積誤差進行檢測的方法存在位置誤差檢測以及航向角誤差檢測精度低、抗干擾能力弱等缺點。為此,本文基于單目視覺[6] 和信標[7,8],設計了一種應用于室內倉儲物流搬運AGV 的運動累計誤差檢測方法。本方法在運動節(jié)點處設置特定信標,首先對信標圖像進行灰度處理,計算信標圖像的內間方差,使用最大內間方差對應的分割閾值對灰度圖像進行分割,獲取二值圖像;其次在二值圖像的基礎上使用柵格對圖像進行分割,對含有前景色的柵格單元進行聚類,使用平均值算法求解信標的中心點坐標,并按照位置關系將中心點與信標定位塊一一對應;然后建立誤差計算模型,計算運動過程中產生的累積誤差;最后通過實驗驗證所述方法能夠檢測出倉儲物流搬運AGV 運動過程中產生的累積誤差,該方法具有較高的精度,滿足倉儲物流搬運AGV 精準定位的要求。
1 累積誤差檢測方案
雙輪差速驅動搬運AGV 在運動過程中,由于傳感器的累積誤差、機械傳動誤差以及裝配誤差等因素,會導致AGV 通過傳感器讀數計算的位姿與實際位姿之間產生累積誤差。具體表現在短時間內AGV 定位精度下降,隨著時間的增加,累積誤差會越來越大,最后導致AGV 運動出錯。為了保證AGV 運動的正確性,須在累積誤差造成運動錯誤前,檢測出累積誤差并對誤差進行補償。采用無畸變攝像頭,其成像原理[9-10] 如圖1 所示,圖像傳感器所在平面與信標所在平面平行。信標中含有3 個定位塊,分別為A、B 、C ,其中A 的中心點為校準點,OC 為攝像頭光心,ZC 為攝像機主軸,O-XYZ 為世界坐標系,OC -XCYC ZC 為攝像機坐標系,o1 ? x1y1為圖像坐標系,o ? xy 為信標中各定位塊中心點確定的信標坐標系,o′ ? x′y′為信標坐標系在圖像平面的投影。 依據定位塊A、B 、C 在圖像傳感器上成像中心點坐標之間的相對位置確定坐標系o′ ? x′y′。通過建立坐標系o′ ? x′y′與坐標系o1 ? x1y1之間的旋轉、平移關系模型,可以計算出航向角累積誤差θ ,在攝像頭安裝高度h 和攝像頭焦距f 已知的條件下,可以求出圖像傳感器中心點在信標坐標系下關于x 軸、y 軸的位置累積誤差dx、dy。
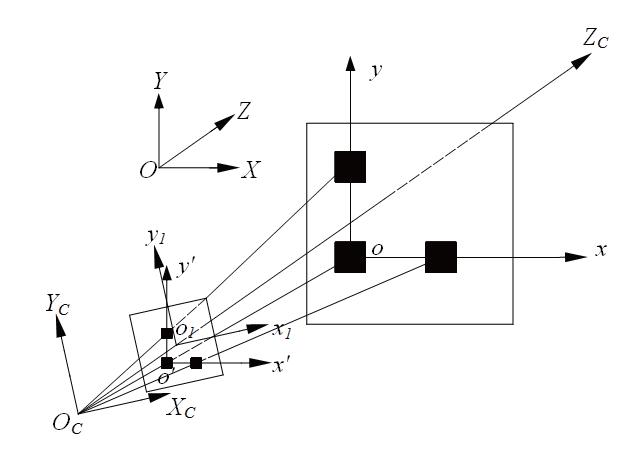
圖1 世界坐標系與圖像坐標系之間的關系模型
2 計算定位塊中心點在圖像傳感器上坐標
2.1 基于柵格分割的聚類方法 首先按照灰度處理[11]、求解最大內間方差[12]、動態(tài)閾值分割[13]、中值濾波[14] 流程獲取二值圖像,然后分別提取出前景色中的3 個定位塊,并計算每個定位塊的中心點坐標,確定坐標系o′ ? x′y′ 。信標的分割聚類方法是采用柵格將二值圖像分割成若干個單元,再對柵格單元進行聚類,從前景色中將3 個定位塊分離。使用聚類法從分割后的圖像中篩選出含有前景色的單元,按照以下方法分離定位塊: Step1 設所有含有前景色像素點的單元構成集合S ,S ={s 1,s 2,s 3,……,sn},通過遍歷法可確定集合S 中所有的元素; Step 2 建立空集A1,將集合S 中的第1 個元素s 1添加到集合A1 中并將s 1 從集合S 中移除; Step 3 從集合S 第1 個元素開始,依次取集合S 中的元素si 與集合A1 中的所有元素進行比較,若這兩個元素代表的單元相鄰,則將集合S 中的元素si 添加到集合A1 中并將元素si 從集合S 中移除; Step 4 重復步驟Step 3,直至集合A1 中的任意元素aj 與集合S 中任意元素si 分別所代表的單元不相鄰; Step 5 判斷集合S 是否為空集,若為空集則前景色分聚類完成,否則重復Step 2 至Step 5,分別建立集合A2、A3、A4、……、An,直至集合S 為空集,并且將A1、A2、A3、……、An 作為元素構成集合A,即A={A1,A2,A3……An}。分割聚類實驗結果如圖2 所示。
圖2 分割聚類結果 2.2 各定位塊中心點坐標計算 對于至少具有兩條互相垂直的對稱軸圖形,可使用平均值算法計算圖形中心點。圖形中心點坐標滿足

式中:xt 為第t 個定位塊的中心點在圖像坐標系o1 ? x1y1下的橫坐標, yt 為第t 個定位塊的中心點在圖像坐標系o1 ? x1y1 下的縱坐標,n 為第t 個定位塊中黑色像素點的總個數,xi 為第t 個定位塊中第i 個黑色像素點在圖像坐標系o1 ? x1y1下的橫坐標,yi 為第t 個定位塊中第i 個黑色像素點在圖像坐標系o1 ? x1y1 下的縱坐標。 利用式(1) 可以計算出集合A 中每個元素對應的中心點坐標oi,所有中心點構成集合O,即O={ o 1,o 2,o 3,……,on }。對于所述方法,O={ o 1,o 2,o 3 }。任意兩定位塊中心點之間的距離
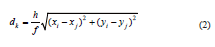
式中:h 為攝像頭的安裝高度,f 為攝像頭的焦距,xi 為中心點oi 在圖像坐標系o1 ? x1y1下的橫坐標,yi 為中心點oi 在圖像坐標系o1 ? x1y1下的縱坐標,xj 為中心點oj 在圖像坐標系o1 ? x1y1 下的橫坐標,yj 為中心點oj在圖像坐標系o1 ? x1y1下的縱坐標。i、j k 分別取1、2、3 且互不相同。當dk 取得最大值時中心點及對應邊長如圖3 所示。
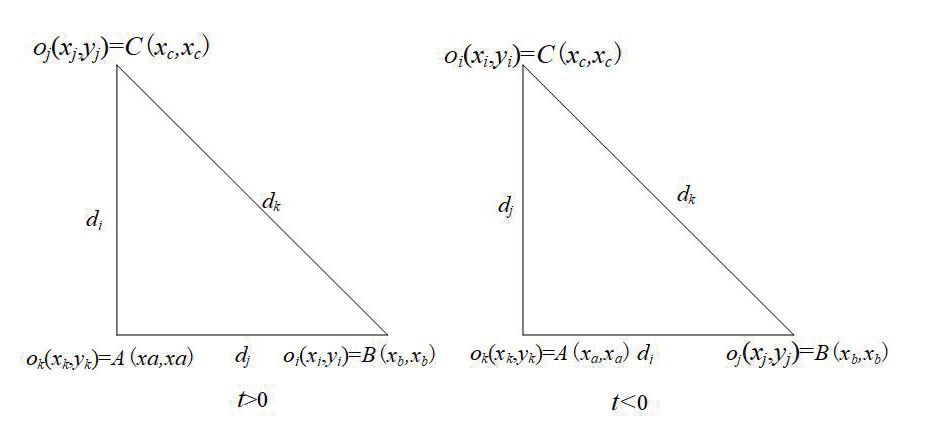
圖3 中心點及對應邊長 中心點ok 對應定位塊A,記中心點ok 的坐標為(xk,yk),取中心點oi(xi,yi),構建向量,利用式(3)判斷中心點oj(xj,yj)與向量之間的關系,有  ? 當t > 0,點oj 在oi 的左側,中心點oi 對應定位塊B ,中心點oj 對應定位塊C ;當t < 0,點oj 在oi 的右側,中心點oi 對應定位塊C ,中心點oj 對應定位塊B 。確定定位塊中心點在圖像坐標系o1 ? x1y1下的坐標,將定位塊A、B 、C 的中心點在圖像傳感器上的投影記為A(xa , ya ), B(xb , yb ),C(xc , yc )。 ?
? 當t > 0,點oj 在oi 的左側,中心點oi 對應定位塊B ,中心點oj 對應定位塊C ;當t < 0,點oj 在oi 的右側,中心點oi 對應定位塊C ,中心點oj 對應定位塊B 。確定定位塊中心點在圖像坐標系o1 ? x1y1下的坐標,將定位塊A、B 、C 的中心點在圖像傳感器上的投影記為A(xa , ya ), B(xb , yb ),C(xc , yc )。 ?
3 累積誤差計算模型
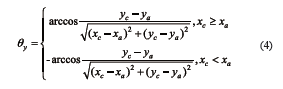
圖像坐標系o1 ? x1y1與信標投影坐標系o′ ? x′y′之間的旋轉、平移關系模型如圖4 所示。圖中,dx 為AGV 在信標坐標系下X 軸方向上位置累積誤差,dy 為AGV 在信標坐標系下Y 軸方向上位置累積誤差,θx 為AGV 在信標坐標系下X 軸方向上航向角累積誤差,θy 為AGV 在信標坐標系下Y 軸方向上航向角累積誤差,有
圖4 累計誤差計算模型

4 實驗結果
實驗采用無畸變攝像頭,將其安裝于AGV 的回轉中心并與地面保持平行,拍攝位于地面的特定信標。利用所述方法計算在任意位置下的位置偏差和角度偏差,將實際測量值與計算結果進行比較。每次實驗進行20次計算,進行6 次獨立重復實驗。選取第1 次、第10 次、第20 次的實驗結果和實際測量結果,如表1 所示。第1 次獨立重復實驗的計算結果與實際測量結果進行比較,誤差如圖5 所示。圖5 計算結果與測量結果之間的誤差由表1 可知,每次獨立重復實驗計算結果,dx、dy的波動不超過1 mm,θ 的波動不超過0.5°,說明本方法計算結果具有較高的穩(wěn)定性。從圖5 可以看出,每次獨立重復實驗計算結果與實際測量結果相比較,dx、dy的誤差不超過1 mm,θ 的誤差不超過1°,說明本方法具有較高的準確度。6 次獨立重復實驗的計算結果與實際測量結果相比較,結果都在誤差允許范圍內,說明本方法具有較高的可靠性。
5 結語
從信標特征識別開始到定位偏差計算,研究了一種用于倉儲物流搬運AGV 運動累積誤差檢測方法。針對特定的信標,在特征提取中使用柵格對二值圖像進行分割,對柵格單元進行聚類,利用平均值算法計算信標中定位塊的中心點坐標,建立圖像與世界坐標系的旋轉、平移關系模型,計算倉儲物流搬運AGV 在世界坐標系下的位姿。最后通過實驗測量,將計算結果與測量結果比較,證明所述方法具有較高精度、穩(wěn)定性和可靠性。進一步提高圖像處理速度和提高定位精度是下一步研究重點。
責任編輯:lq
-
傳感器
+關注
關注
2560文章
52052瀏覽量
760730 -
視覺
+關注
關注
1文章
152瀏覽量
24218 -
AGV
+關注
關注
27文章
1405瀏覽量
41719
原文標題:基于單目視覺的倉儲物流搬運AGV 累積誤差檢測方法研究
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
焊接質量檢測方法

一種基于點、線和消失點特征的單目SLAM系統(tǒng)設計

一種降低VIO/VSLAM系統(tǒng)漂移的新方法

一種將NeRFs應用于視覺定位任務的新方法

一種簡單高效配置FPGA的方法






 工商網監(jiān)
工商網監(jiān)

評論