 基于MSP430F149單片機實現電梯門機控制系統的設計
基于MSP430F149單片機實現電梯門機控制系統的設計
電梯是現代人們生活中不可或缺的工具。目前的電梯門機控制系統均有其固有的缺陷,這些缺陷使電梯不能正常運行、維護工作量大甚至造成人身傷害。因此,研制一種高性能、高可靠性且維護方便、成本適中的電梯門機控制系統具有重要的現實意義。
1 系統的硬件設計
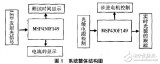
系統的硬件構成如圖1所示,輸入及顯示電路完成人機交互功能,對電梯門機的執行過程進行設定;計算控制電路根據設定參數和外部輸入的信號,依照一定的控制規律,完成計算及控制邏輯輸出;而驅動和保護電路接受計算控制電路的控制邏輯,根據此邏輯控制執行機構的動作,同時監控自身及執行機構的狀態,在發生故障時保護電路動作,以保護元器件安全。下面簡要介紹計算控制電路和執行機構。

1.1 計算控制電路
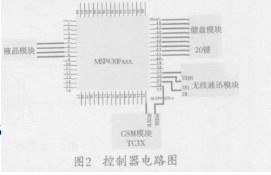
計算控制電路由MSP430F149作為控制電路的處理單元,外加各種信號調整電路和參數掉電保持電路組成。主要包括:參數掉電保持電路;電機轉速反饋和運行方向辨別電路;電流采集反饋電路;位置反饋及開關譯碼電路;電平轉換電路。
電機轉速反饋和運行方向辨別電路 該電路采用光電碼盤來測量電機速度,采用光柵辨向法辨別電機運行方向。實現的方法是將2個光電傳感器相差90°。相位安裝,使他們產生相差90°。相位的A,B相脈沖波,經整形后送到辨向電路中。
位置反饋及開關譯碼電路 電路如圖2所示。A,B,C三相位置是由3個互差120°電角度的光電傳感器送出的方波信號,經過LM324整形后,送人MSP430F149進行最優電流導通角處理,處理后輸出的3個互差120°電角度的方波信號送到GAL16V8進行開關譯碼。GAL16V8同時將譯出的控制導通信號與PWM調制信號、故障排鎖信號、電機正反轉信號一起譯碼,實現電機轉速、方向控制和故障保護功能。

1.2 執行機構
電梯門機開關執行機構由稀土永磁無刷直流電動機組成。電機是雙余度繞組釤鈷永磁方波電機(300V,200W,600r/min),采用集中整距繞組,氣隙磁場分布為方波。轉子位置傳感器為光電位置傳感器,實時檢測電機轉子相對定子繞組的位置,輸出3個寬180°電角、相位差120°電角的矩形波。根據其三路信號組合的不同,確定當前轉子位置及應導通的電樞繞組。
2 系統的軟件設計
系統的主要軟件有:系統初始化程序,人機交互程序,數據存取程序,系統監測程序,電機控制和驅動程序等。
2.1 系統初始化
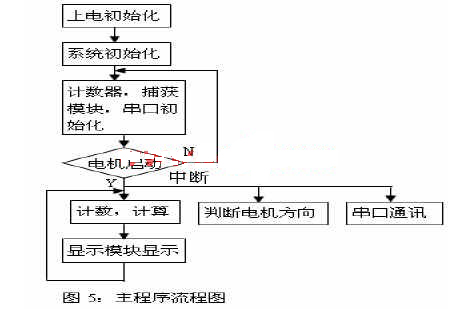
系統初始化包括MSP430F149單片機和外圍器件的初始化、系統全局變量的定義和賦初值。初始化完成后,程序進入主循環體,根據預設的參數或者根據操作者的輸入進行電機控制和調節。初始化流程如圖3所示。設置定時器時,定時器A用于程序循環中的定時查詢、A/D的定時采樣、速度的定時獲取。定時器B用于產生PWM波,以及設定的4個加減速時間。在默認情況下,LED顯示的是電機的轉速信息,只有在操作者干預時,才顯示電流、加減速時間等信息。初始程序的最后將定時器A、定時器B、各個I/O口及看門狗的中斷打開,之后在死循環中對單片機B送往單片機A(MSP430F149)的速度信號進行反復查詢。

2.2 系統監測程序
程序隨時監測的信號有:外部的位置開關信號、IPM給出的報警號、復位請求信號、電梯門遇堵信號、開門信號及關門信號。這些信號均由外部中斷口輸入。位置開關信號告訴系統電梯門的極限位置;IPM的報警信號在IPM探索到過流、過熱時自動發出;電梯門遇堵信號是在程序在進行關門操作時遇到外力作用后發出的;開門及關門信號直接決定電機的運行方向,開門動作還受控于電梯門遇堵信號。
2.3 電機的控制和驅動
電機控制和驅動程序主要完成電機運行速度曲線的處理、最優電流開通角的即時計算。程序在調速時,將所得電機實際轉速與默認數據進行比較,然后對實際轉速進行調節。為了減弱轉矩脈動,需要對轉子位置信號進行一定角度的偏移處理,系統中,經過對電機電流信號的計算,使用了3°角的最優電流開通角。電機的轉子位置信號引起MSP430F149的中斷,在中斷處理程序中,MSP430F149先根據送人的電機實際轉速信號計算出3°角所需時間,然后按照電機運行方向信號,對位置信號進行超前或者滯后處理。退出中斷后,Timer-B依照計算結果,輸出新的三相位置信號給GALl6V8譯碼器,由GALl6V8輸出開關信號,控制逆變器的工作狀態,從而控制電機的運行速度。程序流程圖如圖4所示。

3 結 語
通過設計和調試,系統實現了基本的性能指標。在系統設計過程中,由于注重了通用化、模塊化設計,使得所用的軟件硬件均可以稍加擴展,用于大多數無刷直流電機的控制系統中,成為通用型的變頻器。
責任編輯:gt
-
單片機
+關注
關注
6035文章
44554瀏覽量
634653 -
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
光電傳感器
+關注
關注
9文章
683瀏覽量
41905
發布評論請先 登錄
相關推薦
基于MSP430F149單片機的SDRAM控制程序設計
基于MSP430F149單片機的光電編碼器位置檢測系統設計
基于MSP430單片機F149的GSM電子門匙設計
MSP430F149單片機實現溫控儀

以MSP430F149單片機為控制核心的的點光源跟蹤系統設計
使用MSP430F149單片機控制步進電機的C語言程序免費下載

MSP430F149單片機-IAP升級

基于雙MSP430F149單片機的車輛監控系統車載移動終端設計





 工商網監
工商網監
評論