") 詳談面向V2C場景的ADAS數(shù)字孿生模型構(gòu)建方法
詳談面向V2C場景的ADAS數(shù)字孿生模型構(gòu)建方法
物聯(lián)網(wǎng)(IoT)的發(fā)展提出了許多新穎的技術(shù),其中的應用場景不僅限于用戶級別(例如,個人消費者或私有公司),而且還可以應用于系統(tǒng)級別(例如,商業(yè)或工業(yè)領域)。數(shù)字孿生是物聯(lián)網(wǎng)的新興代表,最近引起了越來越多的關注。數(shù)字孿生被評為2019年十大戰(zhàn)略技術(shù)趨勢之一,其中包括自動駕駛事物(例如,自動駕駛汽車),沉浸式技術(shù)(例如,虛擬現(xiàn)實和增強現(xiàn)實)以及量子計算。
*本文來自本實驗室李王睿的研究成果和學習筆記
盡管數(shù)字孿生的定義在不同的研究中有所不同,但基本思想非常相似:數(shù)字孿生是物理域中實體的數(shù)字域中的數(shù)字副本。數(shù)字孿生技術(shù)得益于物理網(wǎng)絡連接和網(wǎng)絡物理系統(tǒng)(CPS)元素,為實時監(jiān)控和與虛擬對等實體同步實時活動開辟了道路。數(shù)字孿生概念最早是在航空領域誕生的,當時美國國家航空航天局(NASA)將其作為其2010年技術(shù)路線圖的關鍵要素。在過去十年中,隨著其在不同領域的快速發(fā)展,包括航空和航天,機器人技術(shù),制造業(yè)和信息學,數(shù)字孿生在運輸領域也具有巨大潛力。自從在過去的十年中出現(xiàn)以來,數(shù)字孿生概念已經(jīng)在汽車行業(yè)中被松散地定義和采用,部分原因是它與CPS和IoT等其他技術(shù)的相似性和聯(lián)系。
在本文中,我們提出了一種使用車輛到云(V2C)通信的互聯(lián)車輛的數(shù)字孿生框架。針對高級駕駛員輔助系統(tǒng)(ADAS)開發(fā)了一種數(shù)字孿生模型,比如由云計算的參考速度顯示在車輛車載駕駛員接口(DVI)設備上,因此駕駛員可以在駕駛中更智慧地控制車輛。此外,還進行了協(xié)作式匝道并線的案例研究,其中在三輛乘用車上的真實交通中的現(xiàn)場實施驗證了所提出的數(shù)字孿生框架的有效性。
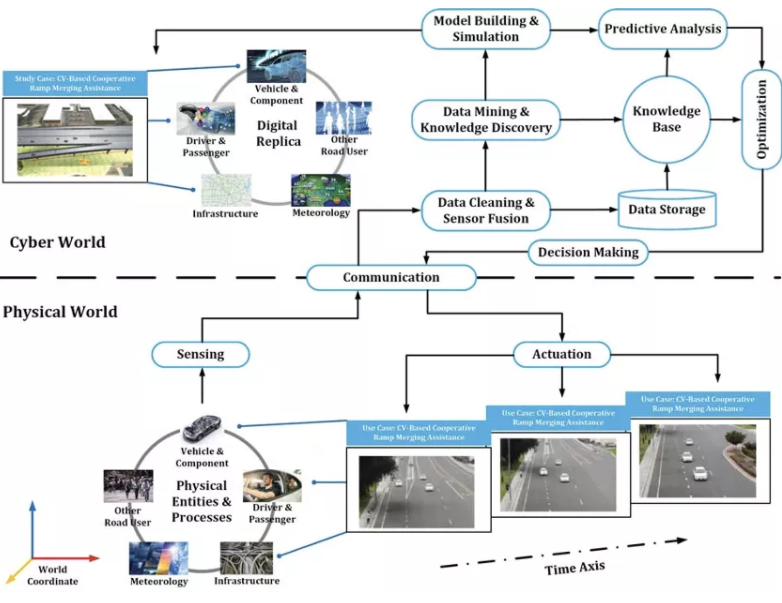
智能網(wǎng)聯(lián)汽車的數(shù)字孿生系統(tǒng)的總體框架
從上圖可以看出,我們?yōu)榫哂袃蓪涌蚣艿幕ヂ?lián)車輛開發(fā)了數(shù)字孿生系統(tǒng)。下層代表物理域,而上層代表數(shù)字域。此外,通信模塊在此系統(tǒng)框架中起著至關重要的作用,它是將兩層緊密連接在一起的紐帶。
數(shù)字孿生框架的物理層隨時間在世界坐標上定義,可能包含所有物理實體及其相互作用,包括車輛和零部件,駕駛員和乘客,道路基礎設施,氣象學,其他道路使用者等。該層中的兩個關鍵模塊是傳感器和執(zhí)行器。傳感器可以檢測物理實體的動態(tài)狀態(tài),操作過程中的變化或事件發(fā)生(例如車速,駕駛員的視線和交通燈狀態(tài)),并以不同的解決方案匯總測量結(jié)果。信息通過通信模塊傳輸?shù)綌?shù)字域,以進行進一步處理。
另一方面,(再次通過通信模塊)接收到來自數(shù)字域的處理結(jié)果,并將其用作物理域中實體或過程的駕駛指示。物理域中的智能網(wǎng)聯(lián)車輛可以是部分或完全自動化的(即聯(lián)網(wǎng)和自動化的車輛),也可以由具有某些ADAS功能的人類駕駛員來駕駛。數(shù)字域發(fā)送的駕駛指示將建議智能網(wǎng)聯(lián)車輛的自動控制器或人工駕駛員進行協(xié)作/智能操作,進而在安全性,機動性和環(huán)境可持續(xù)性方面受益于運輸系統(tǒng)。
數(shù)字孿生框架內(nèi)的數(shù)字域處理了此兩層框架中的所有計算工作。它不僅包含物理域的摘要(即物理實體和過程的數(shù)字副本),而且還執(zhí)行一些關鍵功能。首先,對來自物理域的感知數(shù)據(jù)進行清理(例如異常檢測和刪除,丟失數(shù)據(jù)歸因)并進行融合(包括時間同步)。然后,預處理的數(shù)據(jù)可以存儲在數(shù)據(jù)庫中(例如,用于數(shù)字可追溯性)或發(fā)送到數(shù)據(jù)挖掘和知識發(fā)現(xiàn)模塊以進行進一步探索
使用先進的計算技術(shù)(例如機器學習),從數(shù)據(jù)挖掘和知識發(fā)現(xiàn)模塊中提取的信息可用于為知識庫做出貢獻或構(gòu)建物理域的模型。出于可視化目的,可以將模擬工具(例如車輛模擬器,駕駛模擬器和交通模擬器)集成到建模模塊中。知識庫位于數(shù)字域的中心,建立在歷史信息之上,并隨著新信息的涌入而不斷更新。可以提取知識以進行預測分析(與建模/仿真工具結(jié)合使用)并找到最佳信息支持決策過程的策略。混合動作(通過通信模塊)傳輸回物理域中的執(zhí)行器,以提高整體系統(tǒng)性能。
基于V2C的ADAS架構(gòu)
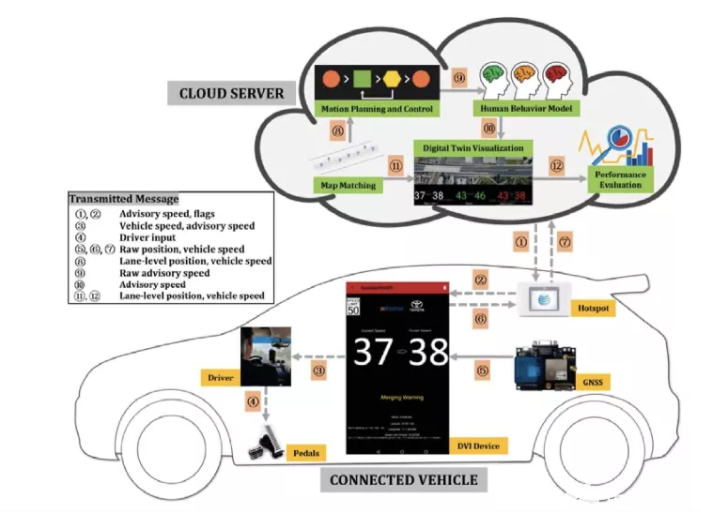
在本節(jié)中,我們在數(shù)字孿生框架內(nèi)開發(fā)了基于V2C通信的ADAS,其目的是為駕駛員提供參考速度信息。下圖中顯示了專門用于此ADAS的系統(tǒng)架構(gòu)圖。下面將討論此基于V2C的ADAS中不同組件的特征。
物理域
在現(xiàn)實世界中,聯(lián)網(wǎng)車輛由蜂窩熱點(可選),全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS),DVI設備和人類駕駛員組成。由于計算得出的速度指南是通過V2C通信從數(shù)字域發(fā)送的,因此在物理域中不需要車載計算機。
1)蜂窩熱點:此模塊提供對DVI設備的蜂窩訪問,因此可以在此數(shù)字孿生模型中進行V2C通信。Wi-Fi熱點可能配備有4G LTE(可能是5G)sim卡,并具有“共享熱點”功能。但是,如果DVI設備(例如手機或平板電腦)已經(jīng)配備了SIM卡,則此蜂窩熱點不是必需的。
2)GNSS:車輛上裝有此模塊,用于測量其實時原始位置(緯度和經(jīng)度)和速度信息,并通過微型USB電纜將其發(fā)送到DVI設備。
3)DVI設備:此模塊向駕駛員顯示建議信息(通過V2C通訊)以進行協(xié)作/智能操作。在DVI上顯示的信息(圖中顯示了一個示例)可能包括當前速度(左側(cè)數(shù)字),參考速度(右側(cè)數(shù)字)和其他一些其他消息(例如,語言指導,緯度和經(jīng)度,IP地址) 。
4)駕駛員:配備的車輛的駕駛員可以通過踩下加速/制動踏板,根據(jù)DVI來調(diào)整車速。由于駕駛員不可能完美地保持參考速度,因此在云服務器上運行了人類行為模型來預測加速/制動錯誤并實時補償指導以提高系統(tǒng)性能。
數(shù)字域
該基于V2C的ADAS的所有計算都在云服務器上進行,在云服務器中,在數(shù)字域中創(chuàng)建物理實體(例如,車輛,駕駛員,道路)和相關功能模塊的數(shù)字副本。以下列出了ADAS的主要數(shù)字模塊的細分:
1)地圖匹配:對于地圖匹配模塊,云服務器上提供了測試場的預制地圖,其中包含諸如道路類型,道路長度,道路ID和方向,道路速度限制,合并區(qū)域和影響區(qū)。地圖匹配模塊的主要功能是位置同步和地理圍欄。為了進行位置同步,可以通過建議的地圖匹配算法將從GNSS接收到的車輛坐標(即經(jīng)度,緯度和高度)與預先構(gòu)建的地圖進行匹配,以更新其在數(shù)字域中的當前位置。對于地理圍欄,定義標志以檢查每個時間戳中車輛的位置和狀況,因此可以相應地執(zhí)行相關的操作。
2)駕駛計劃和運動控制:此模塊生成本車輛的參考速度。該模塊的輸入是所有相關車輛的速度和車道高度位置,其中駕駛計劃器生成本車輛的預計駕駛軌跡,而運動控制器計算參考速度以實現(xiàn)該期望軌跡。
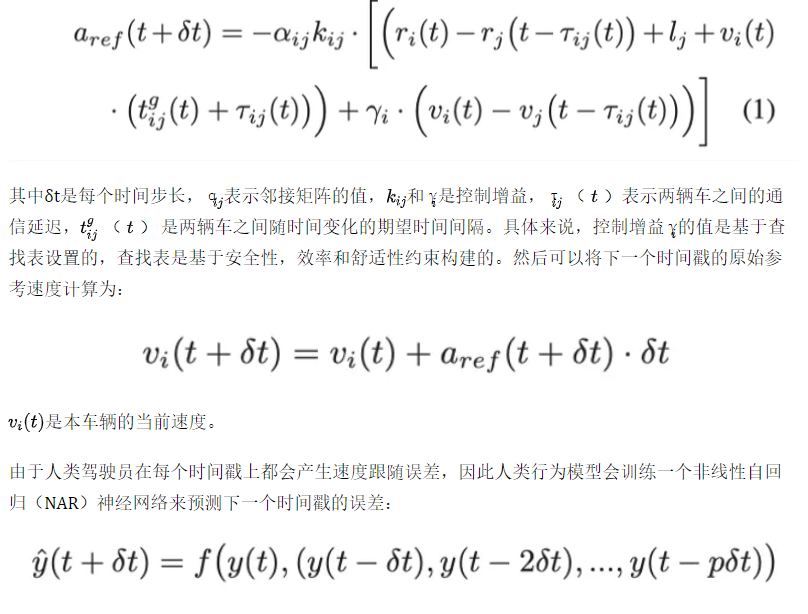
3)人為行為模型:此模塊預測駕駛員產(chǎn)生的速度跟隨錯誤,并實時補償原始參考速度。該模型的輸出是發(fā)送到物理域的參考速度,該速度已經(jīng)考慮了駕駛員產(chǎn)生的速度誤差。
4)數(shù)字孿生可視化:此模塊演示了數(shù)字域中車輛的數(shù)字復制。它從人類行為模型接收參考速度,并從地圖匹配模塊接收位置和車輛速度。該界面根據(jù)GNSS模塊測量的位置在預制地圖上顯示所有車輛的實時運動。它還顯示一些附加信息,例如服務器IP地址,車輛的緯度和經(jīng)度和所配備車輛中DVI的簡化版本。
5)能效評估:能效評估模塊實時分析數(shù)據(jù)。可以在云服務器上分析速度,加速度,能耗,標準污染物排放和許多其他感興趣的性能指標,并將其結(jié)果發(fā)送回物理域或顯示在DVI上。
案例研究:協(xié)作式匝道并線
為了證明根據(jù)ADAS的數(shù)字孿生框架在現(xiàn)實世界中的有效性,我們進行了協(xié)作式匝道并線的案例研究。所提出的方法如圖所示,其中每個合并的車輛都假定已啟用V2C通信并由駕駛員駕駛。任何兩個車輛之間的合并操作都被簡化為一個跟車問題,在先前的研究中,我們采用了“虛擬車輛”的想法:將在另一條合并車道上創(chuàng)建真實車輛的虛擬車輛,共享與真實車輛相同的縱向速度和距離。
基于當前速度和合并距離,可以由云服務器上的駕駛計劃器計算合并時間的估計值。然后可以通過對所有估計的合并時間值進行排序來確定所有相關車輛的合并順序。從圖中可以看出,虛擬車輛被投影在另一個合并車道上,因此其后續(xù)車輛(具有一個較大的序列ID號)可以基于云服務器上的運動控制器進行跟車操作。
基于我們先前的研究,運動控制器采用了基于查表的共識算法。基本上,本車輛i從云服務器檢索其(虛擬)領先車輛j(j = i?1)的信息,包括其長度,縱向速度和橫向合并距離。然后,共識算法將這些輸入以及來自本車輛i的車輛動力學數(shù)據(jù),并通過以下算法計算本車輛i的參考加速度:
這項研究的未來主要方向是將該數(shù)字孿生模型應用于其他車輛用例,例如并非所有車輛都具有V2C連接的混合交通場景,并驗證所提出的數(shù)字孿生框架的有效性。此外,與其他通信方法相比,需要在此數(shù)字孿生框架內(nèi)提出和實現(xiàn)更多服務模塊,以最大程度地發(fā)揮V2C通信的優(yōu)勢。
fqj
-
服務器
+關注
關注
12文章
9129瀏覽量
85348 -
數(shù)字孿生
+關注
關注
4文章
1319瀏覽量
12243
發(fā)布評論請先 登錄
相關推薦
數(shù)字孿生場景構(gòu)建的主要應用行業(yè)
數(shù)字孿生:賦能多行業(yè)場景構(gòu)建的創(chuàng)新應用
如何選擇合適的數(shù)字孿生開發(fā)平臺?這幾點要注意
數(shù)字孿生三維可視化場景如何搭建?
工業(yè)產(chǎn)線機械臂數(shù)字孿生 流程工業(yè)應用

數(shù)字孿生:概述、應用場景與意義
基于數(shù)字孿生的智慧城市
數(shù)字孿生!溫江企業(yè)為全國240余個場景植入“智慧大腦”
數(shù)字孿生場景構(gòu)建的未來發(fā)展

數(shù)字孿生場景構(gòu)建行業(yè)應用和優(yōu)勢

數(shù)字孿生場景構(gòu)建的技術(shù)和優(yōu)勢






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論