 香港中文大學開發出“FreeBOT”球形機器人
香港中文大學開發出“FreeBOT”球形機器人
香港中文大學的研究團隊開發了“FreeBOT”球形機器人,其大小比壘球略大,可以在平面上滾動并在墻壁和斜坡上攀爬。機器人彼此粘在一起,也可以彼此分開,并共同創造各種形狀和動作。
FreeBOT模塊是一個內部裝有磁鐵的球形機器人,它由兩部分組成:磁鐵球形殼體和內部驅動機構。內部驅動機構有兩個輪子,并由兩個直流電動機通過齒輪驅動。內輪在球殼中的位置通過電機控制,并且獨立在平面上滾動。強大的內部磁體允許在鐵磁壁上垂直移動。
原型的內部結構
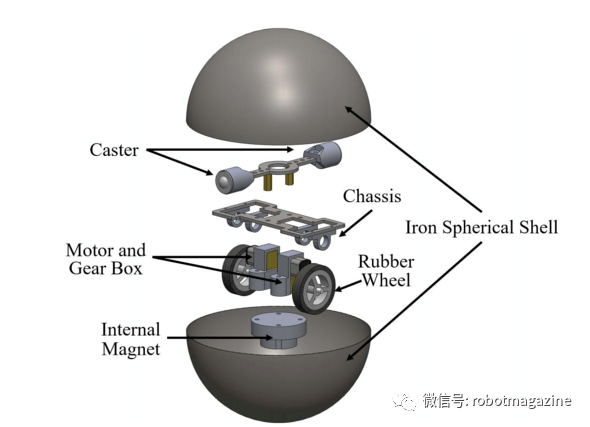
FreeBOT的分解圖
FreeBOT內部磁鐵很小,但是會產生很強的外部磁場。它集成了其他模塊,以便被磁場吸引,甚至在集成后也沿模塊移動。由于幾乎整個模塊都是接觸點,集成機器人組可以各種形狀移動。例如,兩個機器人可以一起工作以攀登非鐵磁紙板臺階,或攀登其他模塊(例如梯子)。
原文標題:一組球形協作移動的機器人“Free BOT”
文章出處:【微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28390瀏覽量
206957
原文標題:一組球形協作移動的機器人“Free BOT”
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
的快速發展,相關人才的需求也在不斷增加,通過閱讀該書可以幫助大家系統性地了解和分析當前具身智能機器人系統的發展現狀和前沿研究,為未來的研究和開發工作提供指導。此外,本書還可以為研究人員和工程師提供具體
發表于 12-20 19:17
ROSCon China 2024 | RDK第一本教材來了!地瓜機器人與古月居發布新書《ROS 2智能機器人開發實踐》
12月7日-8日,為期兩天的ROSCon China 2024在上海圓滿落幕,來自全球的ROS專家學者、開發者、企業代表齊聚一堂,共享機器人前沿技術成果。地瓜機器人攜手眾多RDK生態產品亮相,并聯手古月居共同推出首本基于RDK

ROSCon China 2024 | RDK第一本教材來了!地瓜機器人與古月居發布新書《ROS 2智能機器人開發實踐》
手古月居共同推出首本基于RDK機器人開發者套件的教材——《ROS 2智能機器人開發實踐》。該書由地平線創始人&CEO余凱博士和華東師范
發表于 12-10 10:56
?158次閱讀
普渡機器人與香港特區政府簽約成為重點企業伙伴
近日,香港特區政府引進重點企業辦公室(引進辦)舉辦第三批重點企業伙伴簽約儀式。在香港特別行政區財政司司長陳茂波見證下,普渡機器人作為全球服務機器人行業的領軍企業,正式成為
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
”軟件算法代碼+高性能關節電機,讓“人形機器人人人造”的理想真正成為現實,不管是愛好者還是科技達人,都能夠迅速搭建機器人并實現基本的行走功能,還可以通過智元機器人提供的強化學習等先進算法工具集,
發表于 10-25 15:20
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
。
ROS系統主要特點有哪些
(1) 提供豐富的機器人算法庫
機器人的各種控制以及通信離不開算法庫的支持,ROS系統提供豐富且功能強大的機器人算法庫,如坐標變換、運動控制等。機器人
發表于 07-09 11:38
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優
發表于 07-05 08:52
普渡機器人宣布將于香港成立全球研發中心與國際運營總部
6月28日,在由香港科技園公司(HKSTP)舉辦的“先進制造重點企業意向書簽署”儀式上,全球服務機器人領導者普渡機器人正式宣布將在香港成立全球研發中心與國際運營總部并將入駐

abb工業機器人的編程語言是什么
編程而設計。RAPID語言具有易學易用、功能強大、靈活性高等特點,廣泛應用于ABB工業機器人的編程和應用開發。 ABB工業機器人編程語言RAPID概述 RAPID語言簡介 RAPID是一種專門為工業
全球機器人開發領域采用NVIDIA 機器人開發和生產
比亞迪電子、西門子、泰瑞達和 Alphabet 旗下公司 Intrinsic 采用 NVIDIA Isaac 機器人平臺開發自主機械臂、人形機器人和移動機器人 ? NVIDIA 于今日
北航成功研發微尺寸仿生機器人——昆蟲機器人
據中央電視臺報道,北京航空航天大學科研團隊歷經15年,成功研發出微尺寸仿生機器——“昆蟲”機器人。這款機器人設計靈感源于蟑螂,外形如同硬幣,
香港中文大學教授、IEEE Fellow邢國良出任國科微AI首席科學家
4月22日,國科微宣布正式聘任國際頂級AI專家香港中文大學教授、IEEE??Fellow邢國良先生為國科微AI首席科學家,以進一步加強公司在AI邊緣領域的技術探索,加快AI賽道商業部署。 邢國良教授

廣和通發布基于高通高算力芯片的具身智能機器人開發平臺Fibot
3月29日,為助力機器人廠商客戶快速復現及驗證斯坦福Mobile ALOHA機器人的相關算法,廣和通發布具身智能機器人開發平臺Fibot。
從"精益思想"看機器人的開發與應用:一場科技與效率的完美融合
,為我們的機器人開發提供了一種全新的思路。 "精益思想"源自于精益生產,它強調以最少的投入,創造最大的價值。在機器人開發中,我們同樣需要運用這種思想,以最少的資源,





 工商網監
工商網監
評論