
三相異步電動機具有結構簡單、價格低廉、維護方便、運行可靠等許多優點,因而獲得了廣泛應用。但在采用較簡單的方法調速時,性能遠不如直流電動機。隨著科學技術的發展,特別是半導體制造技術的長足進步,以變頻調速和串級調速為代表的復雜調速技術控制電路因性能不斷提升、成本不斷下降而獲得了廣泛的應用。
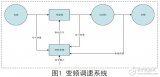
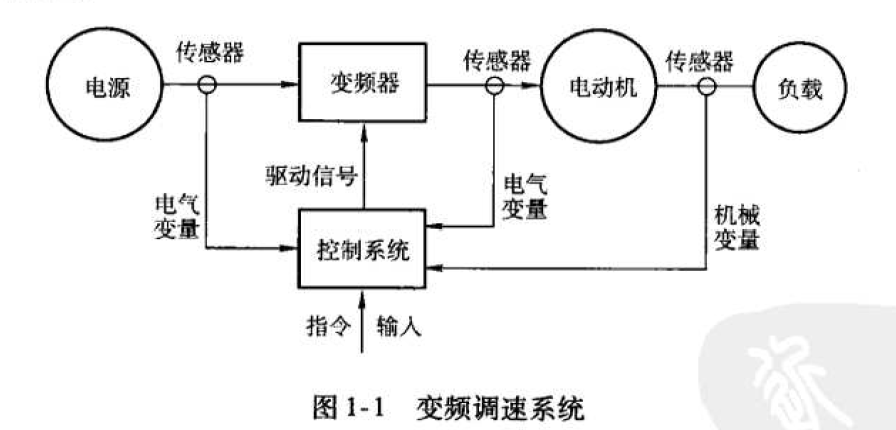
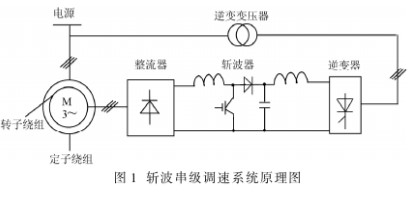
繞線式異步電動機多采用串級調速方法, 由于這種調速方法可以將串入附加電動勢而增加的轉差功率回饋到電網或電動機軸上,克服了以往轉子回路需要串電阻的缺點,提高了調速的經濟性,具有節能作用,可以使系統獲得較高的運行效率。圖1是斬波串級調速原理圖,它在轉子直流回路中加入了直流斬波器,通過調節斬波器的占空比實現電機轉子轉速的無級調速。斬波串級調速技術具有獨特的優勢,特別在高壓大中型電動機節能應用方面前景光明。

對于串級調速系統中逆變控制器多采用SPWM控制技術,而SVPWM控制技術是一種優化了的PWM控制技術,和傳統的SPWM相比,SVPWM 具有直流利用率高(比傳統的SPWM提高了約15%)、諧波少、控制簡單、易于實現數字化等優點。而且電壓空間矢量的不同調制方法在不同程度上可以緩解開關頻率與開關損耗之間的矛盾。正是由于SVPWM控制技術的這些優點,使得本課題的研究具有重要的意義。
1 SVPWM脈寬調制原理及實現
1.1 SVPWM基本原理
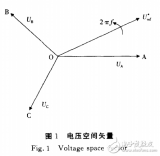
空間電壓矢量脈寬調制(SVPWM)是以三相對稱正弦波電壓供電時交流電動機產生的理想圓形磁鏈軌跡為基準,用逆變器不同的開關模式產生的實際磁通去逼近基準磁鏈圓,并由他們比較的結果決定逆變器的開關狀態,形成PWM波形,從而達到較高的控制性能。根據三相逆變器的工作原理可以知道,逆變橋共有23=8種狀態,若將逆變器的8種狀態用電壓空間矢量來表示,則形成8個基本的電壓空間矢量,其中6個非零矢量,2個零矢量,每兩個電壓矢量在空間相隔60°,如圖1所示。SVPWM技術的目的是通過與基本的空間矢量對應的開關狀態的組合,得到一個等效的空間旋轉電壓矢量Vref(通常稱為參考電壓矢量,其理想軌跡是一個圓)。圖2中所示六邊形內切圓表示SVPWM欠調制方式下參考電壓的極限值。
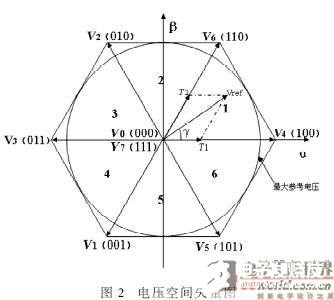
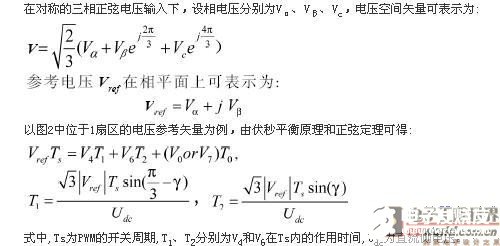
同樣,可根據參考電壓矢量的幅值和相角求取其他扇區的任一基本矢量的作用時間。在參考電壓矢量作用下,可以獲得幅值近似恒定、頂點沿圓形軌跡運動、平均速度可調的矢量。通過調控Vref的頻率、幅值和相位,即可實現逆變器輸出電壓頻率、幅值和相位的控制。
1.2 SVPWM算法
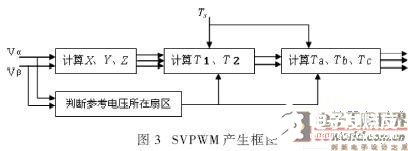
SVPWM算法實質是通過控制逆變器不同的開關模式,使逆變器瞬時輸出的三相脈沖電壓構成的電壓空間矢量與所期望輸出的三相對稱正弦波電壓構成的電壓空間矢量相等效。SVPWM信號的實時調制需要參考電壓矢量的二維靜止坐標系α軸和β軸的分量、以及PWM周期Ts作為輸入,其產生框圖如圖3所示。

1.3 SVPWM的實現
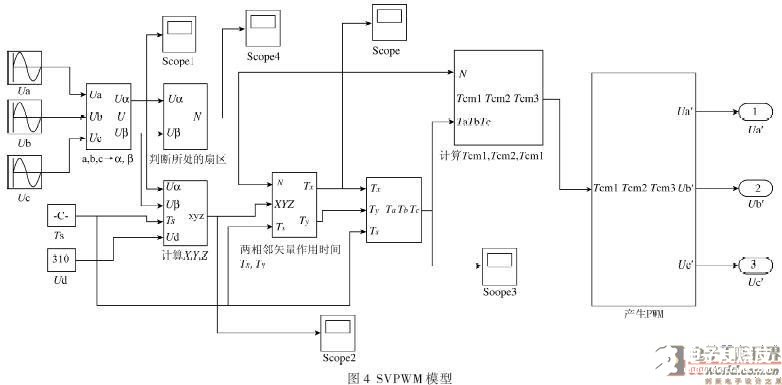
MATLAB/Simulink為了讓用戶能夠迅速創建所需要的系統模型,提供了用以實現各種基本功能的大量標準模塊,并根據其功能的不同將它們歸類在不同的模塊庫中。利用這些模塊庫可以實現前面所分析的SVPWM算法。
SVPWM的模型框圖如圖4所示。其中包括扇區判斷、X, Y, Z的計算、T1,T2的計算、Tcm1,Tcm2,Tcm3的計算以及SVPWM產生等子模塊。
2 串級調速系統仿真模型的建立
由圖1可見,斬波串級調速系統的主電路由三相對稱交流電壓源、三相繞線式異步電動機、整流橋、平波電抗器、斬波單元、逆變器、逆變變壓器等部分組成。為了研究和分析SVPWM算法在串級調速系統中應用的可行性,利用MATLAB/SIMULINK中的Powersystem和Simulink模塊庫,為此系統建立了仿真模型, 由電機測量模塊可以直接檢測出電機的各輸出物理量。仿真結果如圖5所示。
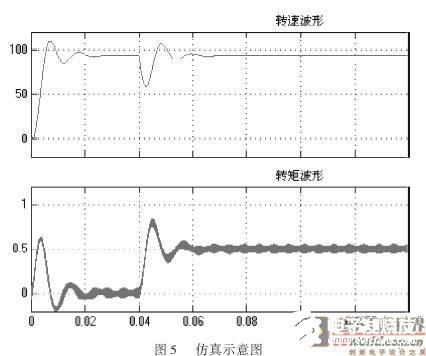
本文根據空間電壓矢量PWM技術的基本原理,對SVPWM算法進行了詳細闡述,并用MATLAB7.1的SIMULINK對SVPWM算法進行了仿真,得到較為理想的結果,最后建立了基于SVPWM算法的串級調速系統仿真模型,結果表明該算法在串級調速系統中的可行性,為優化串級調速系統的數字化設計打下了良好的基礎。
責任編輯:gt
-
控制器
+關注
關注
113文章
16759瀏覽量
181746 -
PWM
+關注
關注
114文章
5274瀏覽量
216783 -
電動機
+關注
關注
75文章
4140瀏覽量
97788
發布評論請先 登錄
相關推薦
基于SVPWM算法的變頻調速系統設計方案
變頻調速SVPWM技術的調制原理,分類,算法與應用及實例的詳細概述
基于SVPWM算法的串級調速系統仿真模型的研究分析





 工商網監
工商網監

評論