 面對進入自動駕駛仿真的IT巨頭,PTV VISSIM還有優勢嗎?
面對進入自動駕駛仿真的IT巨頭,PTV VISSIM還有優勢嗎?
自動駕駛仿真的重要性不言而喻,百度、騰訊、華為、WAYMO等巨頭都已經投入研發。
傳統意義上,汽車仿真和交通仿真是分開研究的。在自動駕駛時代(或智能網聯汽車時代),由于逐步實現車輛聯網、車車通信、車路協同、萬物互聯,汽車仿真和交通仿真需要越來越多的協同和融合。
通過在擁有豐富的不同道路使用者之間交互的模擬交通流中進行訓練,自動駕駛汽車才能獲得在復雜的城市環境中處理復雜交通條件的能力。交通流仿真又分為宏觀交通仿真,微觀交通仿真等。宏觀交通仿真是模擬大規模路網運行能力和狀況的有效工具,一般比較適合應用交通管理措施評估的場景,以及自動駕駛車輛將來用于出行服務方面的研究。對于自動駕駛車輛的驗證,目前微觀交通仿真的手段用的多。微觀交通仿真的目的是描述特定的車輛行為,因此可以用來模擬連續車道和交叉路口的交通情況。微觀交通仿真對于自動駕駛尤其重要。
自動駕駛仿真產業鏈可以簡單分類如下圖:
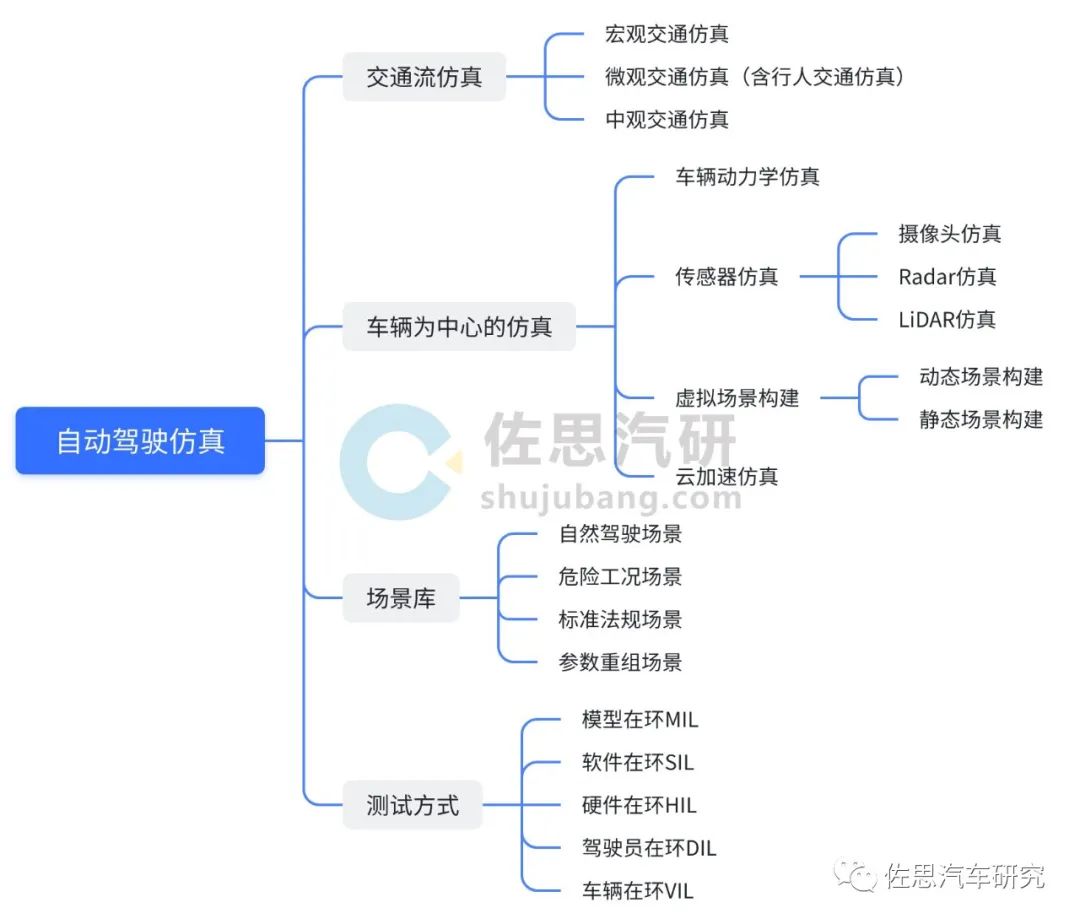
來源:佐思汽研
上圖的每個節點,都有若干的企業或機構在進行研究,從而構成龐大的產業鏈。深入分析自動駕駛仿真產業鏈,佐思汽研發現并存著兩種模式:一種是一體化仿真,另一種是聯合仿真。一體化仿真是指巨頭企業利用資金實力(自研或并購)打通產業鏈,形成盡量獨立且全面的仿真能力;而聯合仿真則是不同仿真企業之間緊密合作,通過產品對接,聯合實現仿真任務。
由于汽車和交通仿真的復雜性,傳統仿真企業基本都是獨立研發某一子系統(或軟件模塊),然后相互之間開放接口,最終以聯合仿真的模式實現某個仿真項目。如多數傳感器仿真軟件,都能實現與車輛動力學仿真軟件 CarSim、CarMaker、VeDYNA 的兼容對接。 歐洲CoExist項目也是聯合仿真的案例之一。CoExist項目由來自7個國家的15個合作方組成,包括德國PTV Group、法國VEDECOM、Renault,西門子TASS和斯圖加特大學等。
下圖是項目的工作流程:
CoExist項目的聯合仿真是在VEDECOM控制邏輯,西門子的Prescan軟件和微觀仿真軟件PTV Vissim之間實現的對接運行。其中的場地數據是在海爾蒙德市的測試道路上結合實際交通環境下采集得到,并進一步分析數據和自動駕駛的跟車行為特性。
隨著ANSYS,西門子等傳統仿真巨頭通過收購,騰訊、百度、華為等新興IT巨頭依靠龐大的資金實力,業務幾乎涵蓋了車輛及傳感器仿真,交通流仿真和場景庫建設。那么,專注于某一環節的仿真企業如何在自動駕駛發展浪潮中保持自身優勢呢?佐思汽研和擅長交通流仿真的PTV Group 中國區總經理沈暢進行了交流。
微觀交通仿真的領先者PTV集團
德國PTV集團成立于1979年,總部設在德國的卡爾斯魯厄爾市。經過40多年的發展,已經在美國、法國、瑞士、荷蘭、比利時、澳大利亞、新加坡、阿聯酋、中國等地設立了分公司。其軟件和技術在世界上被廣泛應用,全球的用戶達到5500個,分布在127個國家,在中國有超過550位客戶,客戶主要來自交通行業,如設計院、政府、交警、大學等。近兩年隨著自動駕駛的發展,開始有一些汽車相關客戶。
從2017年開始,保時捷汽車控股公司最終以3億多歐元收購了PTV集團100%的股份。PTV Group被收購了以后,仍然保持獨立運營,全球大概有900名員工,分布在五大洲,大概有28家公司。
VISSIM是 PTV 公司提供的一款世界領先的微觀交通流仿真軟件。VISSIM可以方便的構建各種復雜的交通環境,包括大型環島,停車場等,也可以在一個仿真場景中模擬包括機動車,卡車,有軌交通和行人的交互行為。 VISSIM的仿真可以達到很高的精度,包括微觀的個體跟馳行為和變道行為,以及群體的合作和沖突。自1992年進入市場以來,VISSIM 已經成為最流行的交通流仿真軟件之一,其投入的深入研發力量和世界范圍內的大批用戶保證了VISSIM 在同類軟件中處于領先地位。
PTV VISSIM在自動駕駛領域支持聯合仿真,聯合仿真可以是車輛通訊軟件跟VISSIM進行對接,也可以是車輛調度軟件、車輛感知軟件、汽車動力學軟件和VISSIM對接。無人駕駛算法通過接入 VISSIM的方式,使用模擬的高動態交通環境進行仿真測試。
近十年來, VISSIM軟件在全球研究自動駕駛技術的汽車廠商里得到了廣泛的應用,尤其是在日本汽車企業中。近年,隨著中國汽車企業、互聯網企業以及出行科技公司在自動駕駛領域研究的深入, VISSIM在自動駕駛方面的應用也在逐漸擴大。 根據智能交通前沿科技《微觀交通仿真軟件分析比較》文章中的分析, VISSIM具備明顯競爭優勢。因此, VISSIM我國應用廣泛, VISSIM已成為國內最流行的微觀交通仿真軟件,也成為國內仿真平臺必選的仿真核心軟件。
相對于其他自動駕駛仿真系統,PTV的軟件具有如下領先優勢:
01
整合小汽車、公交車、貨車、自行車、電動車、摩托車和行人等交通參與者
在現實生活里的交通世界是復雜多樣的,道路上交通參與者種類眾多,有小汽車、公共汽車、貨車、自行車、電動車、摩托車和行人這些不同的交通工具或交通方式。VISSIM 軟件里可以放在同一個工具里進行整合仿真,每個仿真步長,車和車之間,車和人之間都有相互關系。
VISSIM模擬一個城市交叉口的場景
02
支持路網自建和導入,支持V2X仿真
路網、控制和車輛是 VISSIM 軟件里涉及到的 3 大核心組成部分。 對于路網,VISSIM 支持手動創建路網,支持從 PTV 系列軟件中的宏觀軟件 PTV VISUM 和交通工程軟件 PTV VISTRO 中導入路網,也支持通過 Opendrive 格式導入已有的路網。
尤其是支持 Opendrive 格式的路網的導入,對于車企用戶是非常有用和高效的。例如通過 Prescan、Carmaker 搭建的路網,可以讀入 VISSIM 中,不需要重復創建一遍路網。
VISSIM 特有的路段和路段連接器的路網結構形式,可以非常詳盡地模擬復雜交叉口的車流轉向。 VISSIM 不僅擅長模擬車輛的交通流,也非常擅長模擬路口的控制方式,包括限速標志、讓行標志、停止標志、減速帶、交叉口信號控制方案、可變信息板等。
對于車路協同的仿真,對于模擬V2X,VISSIM有很多應用案例,下圖是德國卡爾斯魯厄理工大學(KIT)進行Pre-Drive C2X項目的車車通訊的仿真結果截圖。
德國卡爾斯魯厄理工大學(KIT)的Pre-Drive C2X項目的結果截圖
03
軟件的功能性多樣,開放程度好
VISSIM 的開放程度非常好,所以軟件可用在多樣的場景里,比如機場、停車場、交通樞紐、貨運倉庫、MAAS 的上下客車站等等。目前VISSIM 可以對接眾多流行仿真軟件(如下圖所示)。
VISSIM可以對接的仿真軟件舉例
VISSIM 可以仿真城市道路上的交通,也可以仿真停車場的靜態交通運行,以及樞紐上人車之間的互動關系,因此,可以為自動駕駛仿真測試提供更加豐富全面的場景選擇,不是只局限于道路駕駛的場景。 通過 COM 接口,可以結合檢測器,設置一些變化的管理規則、變化的路徑指令,可以模擬基于條件改變路徑或者速度等的交通場景。
VISSIM多場景里的應用舉例
04
提供大量隨機的選擇可能性,充分反映交通運行的真實性
交通運行本身包含了很多的隨機性,今天這條道路上同一時段運行的車輛分布和明天這條道路上同一時段運行的車輛分布不完全相同。為此,VISSIM 軟件本身提供了大量的隨機因素可以反映到軟件的仿真運行里:
比如車輛輸入的泊松分布(就是在一定的時間內,車輛進入路網有著隨機性,不是統一一起進入的);
車輛類型在比例范圍內的隨機出現;
速度和加速度選擇是從一個區間內隨機選擇;
停留時間是從一個區間內隨機選擇等等。
近年來,針對自動駕駛客戶的研究需要,VISSIM 軟件還為車企特別開發了在路網里隨機生成一些駕駛錯誤的現象,錯誤出現的比例由用戶設定,至于錯誤行為出現在哪條路段的哪個地方,VISSIM 可以隨機生成,比如一些駕駛員誤判交通標志和信號控制方案的現象、駕駛員超速的現象、行駛時偏離中心線的現象、注意力不集中的現象。 以上提到的這些隨機的選擇可能性,可以提供給用戶豐富的手段,來搭建各種甚至是極端的需要測試的交通流測試環境,而這些極端的場景恰恰在真實的世界里是不能隨意測試的。
VISSIM里可以模擬駕駛失誤的幾種場景
05
支持機動車和非機動車混行模擬的交通流仿真軟件
車輛在道路上的駕駛行為一般分為三種:跟車行為,變道行為,橫向超車行為。
在真實世界里,車輛在行駛過程中,前、后車有跟車行為,在行駛中前、后兩輛車之間的距離是在動態調整的,由后一輛車的司機隨時修正的。德國 Wiedemann 教授提出 Car following 跟馳模型,把跟車行為又細分為自由、逼近、跟隨、剎車四種狀態。
橫向超車行為是指在中國很多城市,普遍存在小汽車和自行車、助動車在同一車道超車的現象,需要在交通仿真工具里體現出來。與其他的交通流仿真軟件相比,VISSIM 是目前唯一可以實現這個功能的軟件。
對于三種駕駛行為,VISSIM 提供了對應的 Car following 跟車模型、變道模型和橫向超車行為模型,在軟件里可以模擬駕駛行為。通過對應的駕駛行為編輯窗口,用戶可以修改參數來輸入符合當地交通駕駛狀況的距離等參數。
VISSIM里的駕駛行為模型介紹圖
06
支持自動駕駛列隊跟馳(Platooning)
高速公路上的自動駕駛車隊,將是落地較快的一種自動駕駛應用場景。為此,VISSIM 在軟件里新添了“車隊”這個編輯對象,用戶可以設置車隊允許自動編隊的條件閾值,以及車隊允許自動解散的條件閾值,從而模擬加入車隊、編隊行駛、離開車隊三種運行狀態。
對于車輛加入編隊,VISSIM 軟件僅允許有著相同駕駛行為的車輛加入車隊;
對于編隊行駛,在仿真時候,VISSIM 定義在車隊內部,所有的車輛不能換道,同時每輛車保持相同的車距,僅提供有限的加速度變化;
如果遇到紅綠燈,車隊來不及完全通過的狀況下,車隊會自行拆散;
一旦車隊里的車輛準備離開車隊的時候(比如在高速公路里需要進入匝道,離開高速公路的時候),在 VISSIM 的交通仿真里,該車輛會提前增加與前車和與后車的跟車距離后,自行離開車隊。
07
除了VISSIM ,PTV還有更全面的產品線支持
PTV集團一直專注于做交通軟件和物流軟件,產品組合涵蓋了廣泛的軟件解決方案,如:Visum多模式出行規劃和宏觀交通模擬軟件;Vistro進行交通影響分析,優化信號燈時間;Optima實時管理整體交通路網;Viswalk模擬和仿真行人行為;MaaS Modeller計算用戶“出行服務”商業案例的運行效果。 隨著自動駕駛技術的發展,PTV軟件組合也不斷拓展,以應用于自動駕駛的諸多場景。
08
PTV產品和IT巨頭的仿真平臺是合作關系
目前有很多IT企業進入仿真領域,通常利用算法來虛擬交通流數據。這種虛擬交通數據是用特定的、定義明確的障礙物和交通信號人工創建的,與真實的交通狀況相比,這些數據的真實性和復雜性不高。PTV具有大量來自于真實交通流的數據、模型及算法,可以彌補他們的不足。實際上,PTV產品已經被多家IT巨頭的仿真平臺采用。
對于自動駕駛來說,解決自動駕駛車輛和其他道路使用者之間的交互仍然是一個挑戰。現有的仿真器較少考慮雙方的相互作用。舉例來說,在Apollo仿真平臺中實現了兩種類型的非車輛交通參與者:行人和騎行者。然而,這些非車輛代理的行為是預先定義的,因此它們不能實時地對車輛做出反應。雖然在CARLA 中引入了動態行人,但是車輛與行人之間的交互是以一種簡單的預先指定的方式進行處理:行人在移動之前會查看附近是否有車輛,然后在沒有進一步檢查的情況下繼續移動,這種交互模式還過于簡單,需要再深入研究。
為了逼近真實交通場景,自動駕駛仿真需要給大量參與車輛和其他道路使用者提供交互能力時,算力成為瓶頸,尤其是在進行大規模仿真時。要解決這些挑戰,PTV將與產業鏈各環節合作伙伴一起,共同推動自動駕駛仿真技術的發展,加快自動駕駛的落地進程。
參考文獻:
1. 51VR等:《中國自動駕駛仿真技術研究報告(2019)》;
2. 中國電動汽車百人會等:《中國自動駕駛仿真藍皮書(2020)》;
3. 智能交通前沿科技:《交通流仿真綜述》《微觀交通仿真軟件分析比較》
4. 汽車之家:肖瑩《目前仿真測試在自動駕駛領域的發展如何》
5. 焉知自動駕駛:居菲《歐洲自動駕駛仿真項目CoExist介紹》
6. 焉知自動駕駛:沈暢《VISSIM 交通流仿真軟件,自動駕駛技術的訓練場》
編輯:jq
-
IT
+關注
關注
2文章
862瀏覽量
63504 -
PTV
+關注
關注
0文章
2瀏覽量
6694 -
自動駕駛
+關注
關注
784文章
13787瀏覽量
166407
原文標題:面對進入自動駕駛仿真的IT巨頭,PTV VISSIM的優勢何在?
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一文聊聊自動駕駛測試技術的挑戰與創新



自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術



自動駕駛無圖方案真的可行嗎?
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛仿真測試實踐:高精地圖仿真


未來已來,多傳感器融合感知是自動駕駛破局的關鍵
大眾汽車和Mobileye加強自動駕駛合作
Waymo自愿召回444輛自動駕駛汽車 L4的自動駕駛還有很多路要走






 工商網監
工商網監
評論