

1 引 言
頻移鍵控(FSK)是利用數字基帶信號控制載波的頻率來傳送信息的一種方式。“1”碼用頻率f1傳輸,“0”碼用頻率f2傳輸。FSK信號又可分為2種,一種叫離散相位FSK信號,記作DPFSK,這種信號的波形在基帶信號“0”,“1”交替時,載波相位不連續;另一種叫相位連續FSK信號,記作CPFSK,他在碼元“0”,“1”交替時相位連續。CPFSK信號由于其相位的連續性,不僅具有實現容易、適用頻帶寬、抗干擾能力強、解調無需相干載波等優點,而且避免了DPFSK信號由于在頻率轉換點上的相位不連續,而使功率譜產生很大的旁瓣分量,帶限后會引起包絡起伏的缺點,因此在數字通信領域有著廣泛應用。
在實際應用中CPFSK信號的實現有許多種途徑,例如采用頻率切換技術、動態改變諧振電路LC組件參數或者直接采用調制芯片如DDS等。如何在滿足系統功能的前提下,以較少的硬件成本完成CPFSK信號調制,具有廣泛的應用價值。本文介紹在我國磁懸浮列車車地通信系統中應用的一種CPFSK中頻調制器,其核心是基于鎖相環路的CPFSK信號調制技術。系統要求中頻頻率為280 MHz,在信道帶寬25 MHz以內,對前級編譯碼板提供的碼率為10.24 Mb∕s的數據和周期為1 ms,脈寬10~12μs的報頭脈沖信號實現調制后送至后級的38 GHz毫米波前端。
2 設計思路及系統仿真
CPFSK的基本數學原理就是用數字基帶信號去控制頻率的切換,完成對載頻信號的調制,并保持相位的連續性,從而實現數字信息的傳輸。在一個碼元時間Ts內,CPFSK信號可表示為:
當θ(t)為時間的連續函數時,已調波在所有時間上是連續的。若傳0碼時載頻為ω1,傳1碼時載頻為ω2,他們相對于未調載頻ω0的頻偏為△ω,上式又可寫為:
式中的θ(0)為初相角,取決于過去碼元的調制的結果,他的選擇要防止相位的任何不連續性。對于CPFSK信號有,βf稱為調制指數。
傳統CPFSK信號的實現途徑包括以下3種方式:
頻率轉換 采用數字基帶信號控制兩個獨立的振蕩器,通過加法器疊加實現CPFSK調制。該方式采用了部分數字電路,精度較高,但由于兩個邊頻采用獨立的高頻振蕩器生成,在頻域引入了大量的諧波成分,無法滿足相位連續的調制。
直接調頻 采用數字基帶信號直接控制LC振蕩回路的參數改變,實現CPFSK調制。該方式實現容易,相位連續,但采用了大量的仿真電路組件,頻率精度和穩定性無法保證。
調制解調芯片 采用成熟的調制解調芯片實現。該方式采用了當前通信電子技術發展的最新成果,直接利用現成硬件加以實現CPFSK調制、精度高、頻率穩定性好,但由于調制解調芯片普遍遵循了相應的CCITT通信協議標準,只能實現特定載頻、特定調制頻率上的CPFSK調制,并且硬件成本較高,無法滿足專用領域的應用。
綜上所述,該CPFSK調制器采用基于鎖相環路(PLL)方式的CPFSK調制,其原理與仿真調制相同,一方面可以保證相位的連續性,另一方面利用PLL的穩頻特性可以保證較高的頻率的穩定度,并且實現方法簡便。
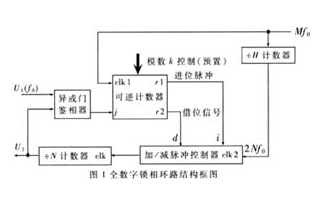
調制器原理框圖如圖1所示。
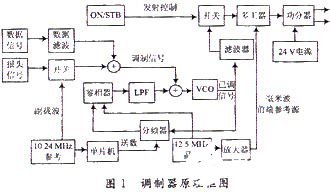
其中數據信號為10.24 MHz曼徹斯特編碼信號,為了限制中頻帶寬并減小數據信號的碼間串擾,在數據濾波部分采用升余弦濾波器,其頻率特性為:
升余弦特性所形成的基帶波形h(t),除了在本碼元抽樣時刻上不為零外,在其它碼元的抽樣點上均為零值,滿足無碼間干擾的時域條件。不僅如此,他在兩個抽樣點之間還有一個零點,并且他的“尾巴”收斂快,因此這樣的波形對于減小碼間干擾及定時提取都十分有利。
用報頭信號作為開關的控制信號,實現對10.24 MHz的副載波(來自于前級的數據基帶板的參考輸出,以便與數據有同步關系)進行幅度鍵控(ASK),將鍵控輸出與數據信號合成后送到VCO調諧端。選用10.24 MHz這個頻率做副載波,從頻譜上看10.24 MHz恰好為數據信號頻譜的一個零點,這樣可以有效避免報頭和數據信號的互相干擾,利于解調。此外10.24 MHz還作為單片機的外接參考。
合成的調制信號加到VCO的調諧端,對于鎖在一個點頻上的鎖相環而言,調制信號可認為是一種干擾,因此PLL的環路濾波器必須抑制掉調制信號對載頻的干擾。從鎖相環誤差傳遞函數的角度來分析,由于鎖相環的誤差傳遞函數He(jω)具有高通特性,因此必須設計合適的環路濾波器,讓調制信號的最低頻率ωm處于鎖相環誤差傳遞函數的通帶以內,從而實現頻率調制。這種方案在調制頻率ωm很低,進人He(jω)的阻帶之后,調制頻偏是很小的,這是這類方案的一個顯著的缺點。但由于送入該調制器的數據信號為10.24 Mb∕s的曼徹斯特編碼信號,調制頻率下限不可能很低,從而避免了上述缺點的影響。
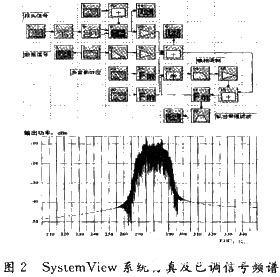
圖2是用SystemView對整個調制器進行系統仿真的框圖和得到的已調信號的頻譜。
3 實際電路
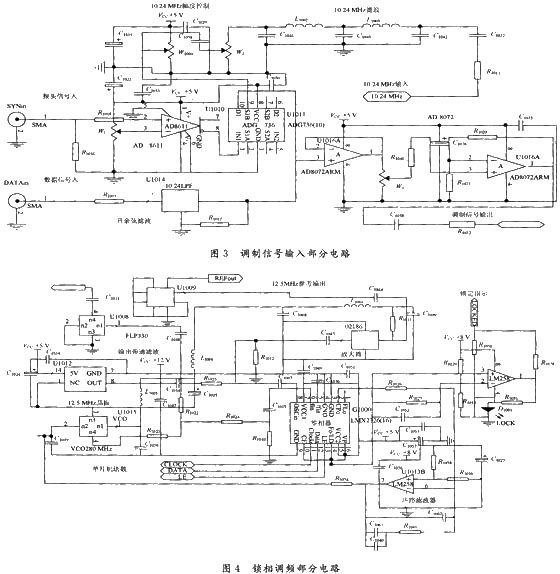
調制信號輸入部分如圖3所示,報頭信號輸入經比較器AD8611整形后作為開關ADG736的控制信號,電位器W1用于調節比較器的參考電壓,以適應不同幅度的報頭輸入。編譯碼送來的10.24 MHz數據信號經過低通濾波并由電位器W2控制幅度后送入ADG736。ASK輸出和經升余弦濾波后的數據信號一起送到放大器AD8072放大后送至VCO的調諧端,電位器W3用于控制合成信號的幅度,從而控制調制器的調制度,使已調信號帶寬控制在系統要求的25 MHz以內。
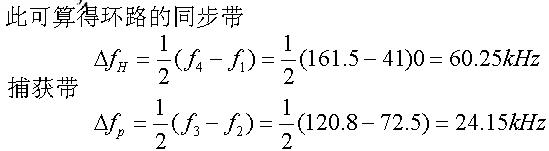
鎖相環部分如圖4所示,經過前面的分析,鎖相環的環路濾波器帶寬應低于調制信號的最低頻率。
由于磁懸浮列車行進過程中的振動可能會引起輸出頻率的抖動,因此環路帶寬又必須足夠寬使鎖定時間足夠快。綜合上述考慮,環路帶寬設計成50 kHz左右,鑒相頻率由單片機過程控制可選500 kHz,625 kHz,1 250 kHz,2 500 kHz四種,以便通過調試過程得出一個最優值。鑒相器芯片選取帶Charge Pump的LMX2316,其為32∕33雙模預分頻,外接晶振5~100 MHz,最大鑒相頻率10 MHz,射頻輸入工作頻率0.1~2.8 GHz。由于ChargePump電流較小因此環路濾波器采用有源濾波器標準反饋結構(standard feedback approach)以獲取較低的雜散。使用NSC的“WEBBECH”工具,可以方便快捷地完成鎖相環的設計和仿真。此外12.5 MHz的晶振輸出經放大器SNA586放大后送至多任務器,為后級的毫米波前端提供參考信號。系統提供的發射控制信號用于實現各發射站間的信號切換,以避免越站干擾。
最終完成的實際電路如圖5所示。調制器中頻為280 MHz,已調信號帶寬25 MHz(可調),最大數據速率可達15 Mb∕s(死循環誤碼率10-9)。目前該中頻調制器已在磁浮試驗線車地通信系統的地面基站和車載移動站中投入使用,性能良好。

責任編輯:gt
-
鎖相環
+關注
關注
35文章
594瀏覽量
88477 -
調制器
+關注
關注
3文章
893瀏覽量
46043
發布評論請先 登錄
高頻鎖相環路LMX2430電子資料
鎖相環路是什么?有何特點
用鎖相環路實現任意頻率變換技術
基于FPGA的全數字鎖相環路的設計
鎖相環路跟蹤特性的測量方法
鎖相環在調制和解調中的應用及概念解析

采用Spartan2系列FPGA器件實現全數字鎖相環路的設計和仿真驗證
鎖相環路的工作原理






 工商網監
工商網監

評論