 目標檢測模型和Objectness的基礎知識
目標檢測模型和Objectness的基礎知識
導讀
在本文中,我們將討論目標檢測模型和Objectness的基礎知識。
什么是物體檢測模型?
物體檢測模型本質上,正如其名稱所示,檢測物體。這意味著給定一個圖像,它可以告訴你物體在哪里,以及這個物體是什么。例如,在上面的圖像中,我們有許多物體,并且使用物體檢測模型,我們已經檢測出不同的物體在圖像中的位置。
這類模型有很多應用。舉幾個例子,物體檢測在以下方面很有用:
自動駕駛汽車,可以檢測到乘客、其他車輛、紅綠燈和停車標志。
安保,模型可以探測到公共區域的槍支或炸彈,并向附近的警察報警。
總的來說,這類模型非常有用,在過去幾年里,機器學習社區已經對它們進行了大量的研究。
物體檢測中區域建議的介紹
首先,讓我們了解一下物體檢測模型是如何工作的。首先,我們必須給出一個物體的建議位置。我們把這個建議的位置稱為我們感興趣的區域,通常顯示在一個邊界框(也稱為圖像窗口)中。根據物體檢測模型的類型,我們可以通過許多不同的方式來實現這一點。
樸素方法:我們將圖像分割成多個部分,并對每個部分進行分類。這種方法效率低下是因為必須對每個生成的窗口應用分類網絡(CNN),導致計算時間長。
滑動窗口方法:我們預先確定好窗口比例(或“錨”),然后滑過圖像。對于每個窗口,我們處理它并繼續滑動。與樸素方法類似,這種方法生成的窗口較多,處理時間也比較長。
選擇性搜索:使用顏色相似度,紋理相似度,和一些其他的圖像細節,我們可以用算法將圖像分割成區域。雖然選擇性搜索算法本身是耗時的,但這使得分類網絡的應用需求較少。
區域建議網絡:我們創建一個單獨的網絡來確定圖像中感興趣的區域。這使得我們的模型工作得更快,但也使得我們最終模型的準確性依賴于多個網絡。
上面列出的這些不同選項之間有一些區別,但一般來說,當我們加快網絡的處理時間時,我們往往會犧牲模型的準確性。
區域建議機制的主要問題是,如果建議的區域不包含物體,那么你的分類網絡也會去分類這個區域,并給出一個錯誤的標記。
那么,什么是Objectness?
Objectness本質上是物體存在于感興趣區域內的概率的度量。如果我們Objectness很高,這意味著圖像窗口可能包含一個物體。這允許我們快速地刪除不包含任何物體的圖像窗口。
如果一幅圖像具有較高的Objectness,我們期望它具有:
在整個圖像中具有唯一性
物體周圍有嚴格的邊界
與周圍環境的外觀不同
例如,在上面的圖像中,我們期望紅色框具有較低的Objectness,藍色框具有中等的Objectness,綠色框具有較高的Objectness。這是因為綠色的框“緊密”地圍繞著我們的物體,而藍色的框則很松散,而紅色的框根本不包含任何物體。
我們如何度量Objectness?
有大量的參數影響圖像窗口的objectness。
多尺度顯著性:這本質上是對圖像窗口的外觀獨特性的度量。與整個圖像相比,框中唯一性像素的密度越高,該值就越高。
顏色對比度:框內像素與建議圖像窗口周圍區域的顏色對比度越大,該值越大。
邊緣密度:我們定義邊緣為物體的邊界,這個值是圖像窗口邊界附近的邊緣的度量值。一個有趣的算法可以找到這些邊緣:https://cv-tricks.com/opencv-dnn/edge-detection-hed/。
超像素跨越:我們定義超像素是幾乎相同顏色的像素團。如果該值很高,則框內的所有超像素只包含在其邊界內。
超像素區域以不同顏色顯示。請注意,框內的超像素大部分不會泄漏到圖像窗口之外。因此,這個“超素跨界”值將會很高。
以上參數值越高,objectness越高。試著將上述參數與我們前面列出的具有高objectness的圖像的期望聯系起來。
責任編輯:lq
-
圖像分割
+關注
關注
4文章
182瀏覽量
17995 -
檢測模型
+關注
關注
0文章
17瀏覽量
7306 -
機器學習
+關注
關注
66文章
8406瀏覽量
132565
原文標題:理解物體檢測中的Objectness
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
AI模型部署邊緣設備的奇妙之旅:目標檢測模型
華為-射頻基礎知識培訓
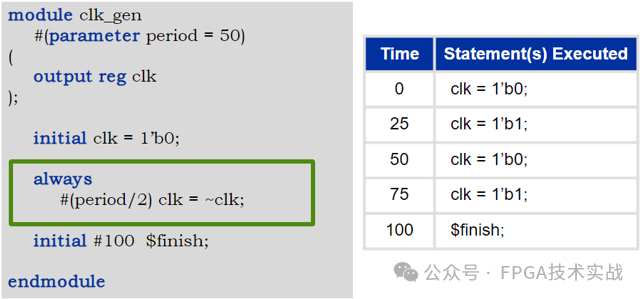
Verilog HDL的基礎知識

全新的半導體基礎知識






 工商網監
工商網監
評論