 關于定時器的基礎知識與基本原理及編輯代碼分析
關于定時器的基礎知識與基本原理及編輯代碼分析
單片機開發中,電機的控制與定時器有著密不可分的關系,無論是直流電機,步進電機還是舵機,都會用到定時器,比如最常用的有刷直流電機,會使用定時器產生PWM波來調節轉速,通過定時器的正交編碼器接口來測量轉速等。
本篇先介紹定時器的基礎知識,然后對照這些知識介紹一下定時器輸出PWM的基本原理,以及編程實現與代碼分析。
首先來看一下定時器的基礎介紹。
11 定時器基礎知識
1.1 定時器種類
以STM32F4為例,一共有14個定時器:
高級定時器(TIM1、TIM8)
通用定時器(TIM2~TIM5,TIM9~TIM14)
TIM2~TIM5(通用定時器里功能較多的)
TIM9/TIM12
TIM10/TIM11和TIM13/TIM14
基本定時器 (TIM6、TIM7)

1.2 各種定時器的特性
1.2.1 高級定時器與通用定時器
這里列舉高級定時器的特性,在此基礎上,對比添加其與通用定時器的不同之處:
16 位遞增、遞減、遞增/遞減自動重載計數器(TIM2 和 TIM5為32位)
16 位可編程預分頻器,用于對計數器時鐘頻率進行分頻(即運行時修改),分頻系數介于 1 到 65536 之間。
多達 4 個獨立通道(TIM9/TIM12有2個,TIM10/TIM11,TIM13/TIM14只有1個),可用于:
輸入捕獲
輸出比較
PWM 生成(邊沿和中心對齊模式)(高級定時器和TIM2~TIM5特有,其它是只有邊沿對齊模式)
單脈沖模式輸出
帶可編程死區的互補輸出(高級定時器特有)。
使用外部信號控制定時器且可實現多個定時器互連的同步電路(TIM10/TIM11,TIM13/TIM14沒有)。
重復計數器,用于僅在給定數目的計數器周期后更新定時器寄存器(高級定時器特有)。
用于將定時器的輸出信號置于復位狀態或已知狀態的斷路輸入(高級定時器特有)。
發生如下事件時生成中斷/DMA 請求:
更新:計數器上溢/下溢、計數器初始化(通過軟件或內部/外部觸發)
觸發事件(計數器啟動、停止、初始化或通過內部/外部觸發計數)(TIM10/TIM11和TIM13/TIM14沒有此功能)
輸入捕獲
輸出比較
斷路輸入(高級定時器特有)
支持定位用增量(正交)編碼器和霍爾傳感器電路(高級定時器和TIM2~TIM5特有)。
外部時鐘觸發輸入或逐周期電流管理(高級定時器和TIM2~TIM5特有)。
1.2.2 基本定時器
基本定時器 (TIM6、TIM7)的功能比較單一,所具有的功能如下:
16 位自動重載遞增計數器
只能定時,沒有外部 IO
16 位可編程預分頻器,用于對計數器時鐘頻率進行分頻(即運行時修改),分頻系數介于 1 和 65536 之間
用于觸發 DAC 的同步電路
發生如下更新事件時會生成中斷/DMA 請求:計數器上溢
1.3 定時器使用配置
使用定時器,一般需要配置如下:
時基:也就是計數器的計數時鐘
自動重裝載值:每次計數的最大值
輸出通道:當需要使用定時器輸出某種波形時(如PWM)
輸入通道:當需要使用定時器接收某種波形時(如電機編碼器信號)
先來看一下定時器的原理框圖,對定時器的內部原理有一個整體直觀的感受:
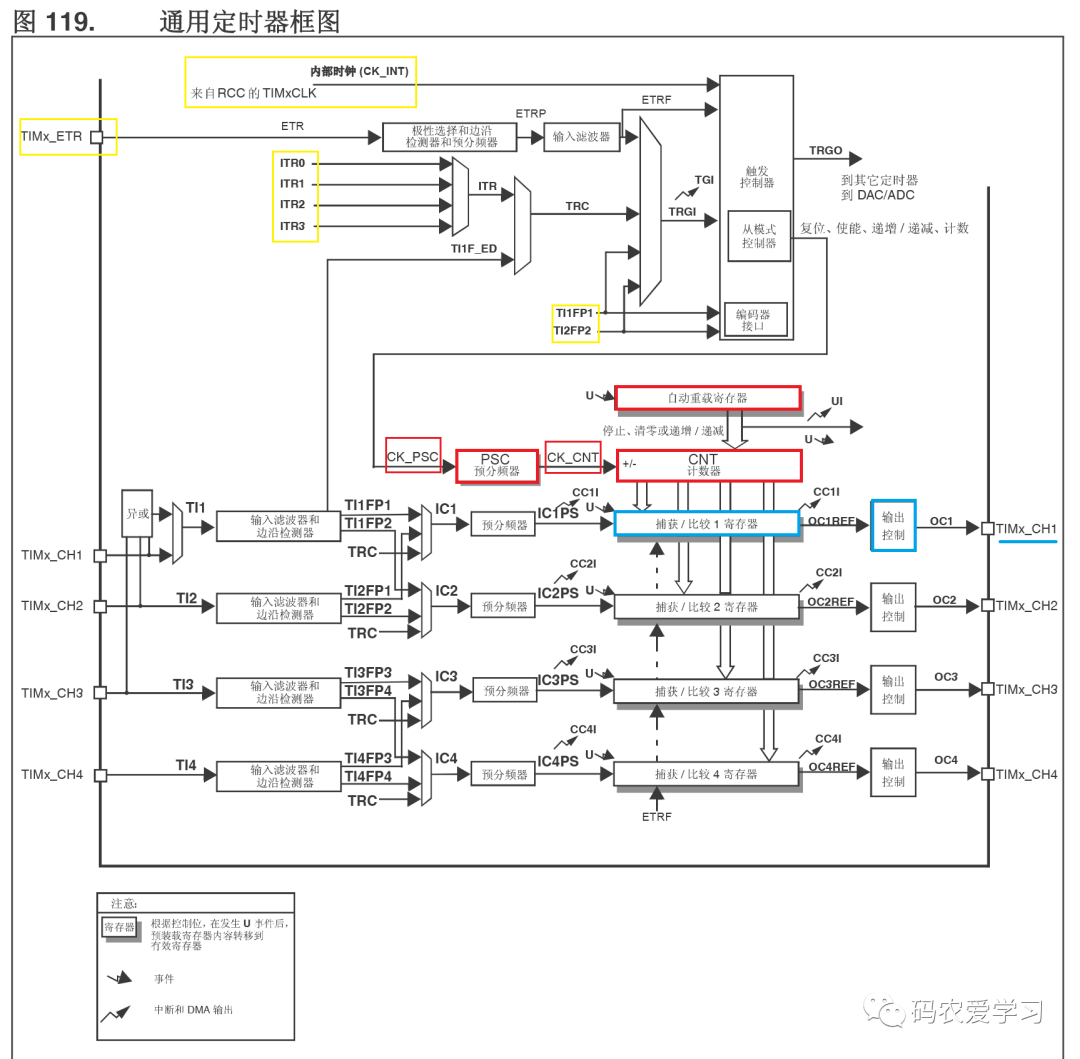
1.3.1 時鐘源
從上圖可以看出,計數器的時鐘源可以為:
由RCC的內部時鐘分頻得到
由定時器的TIMx_ETR引腳得到
由其他定時器通過TRGO輸出得到
一般使用RCC的內部時鐘CK_INT,也即定時器時鐘TIMxCLK,經APB1或APB2預分頻器后分頻提供。
關于定時器時鐘源的具體細節,可以來看一下STM32F4的時鐘樹:
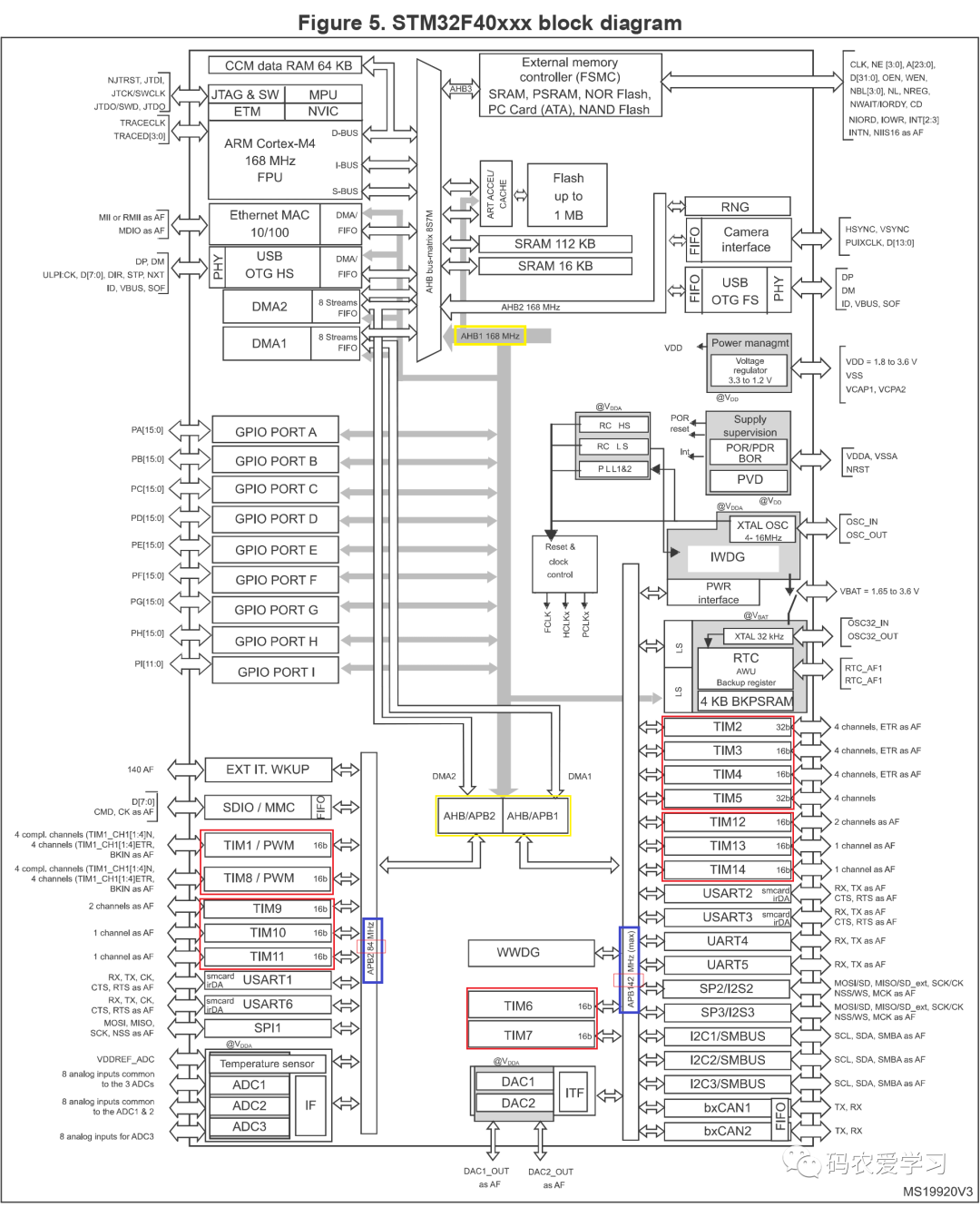
從STM32F4的內部時鐘樹可知:
高級定時器timer1, timer8以及通用定時器timer9, timer10, timer11的時鐘來源是APB2總線(84MHZ)
通用定時器timer2~timer5,通用定時器timer12~timer14以及基本定時器timer6,timer7的時鐘來源是APB1總線(42MHZ)
另外:
當APB1和APB2分頻數為1的時候,各定時器的時鐘就是對應的APB1或APB2的時鐘;
如果APB1和APB2分頻數不為1,那么各定時器的時鐘就是對應的APB1或APB2的時鐘的2倍;
由于庫函數中 APB1 預分頻的系數默認是 2,所以,所以TIM1、TIM8~TIM11的時鐘為APB2時鐘的兩倍即168MHz,TIM2~TIM7、TIM12~TIM14的時鐘為APB1的時鐘的兩倍即84MHz。
1.3.2 計數器時鐘
由于定時器時鐘的提供的可以頻率較高,計數器不需要這么高的頻率來計數,所以會進行降頻,使用一個合適的低頻時鐘來計數。
定時器時鐘經過PSC 預分頻器之后,即 CK_CNT,用來驅動計數器計數。PSC 是一個16 位的預分頻器,可以對定時器時鐘TIMxCLK 進行 1~65536 之間的任何一個數進行分頻。
具體計算方式為:CK_CNT=TIMxCLK/(PSC+1)。
比如,使用STM32F4的通用定時器2(TIM2CLK為APB1的時鐘的兩倍即84MHz),PSC設置為83,則計數時鐘為84MHz/(83+1)=1MHz,即1ms計一個數。
1.3.3 計數器
計數器 CNT 是一個 16 位的計數器,只能往上計數,最大計數值為 65535。當計數達到自動重裝載寄存器的時候產生更新事件,并清零從頭開始計數。
1.3.4 自動重裝載寄存器
自動重裝載寄存器 ARR 是一個 16 位的寄存器,這里面裝著計數器能計數的最大數值。當計數到這個值的時候,如果使能了中斷的,定時器就產生溢出中斷。
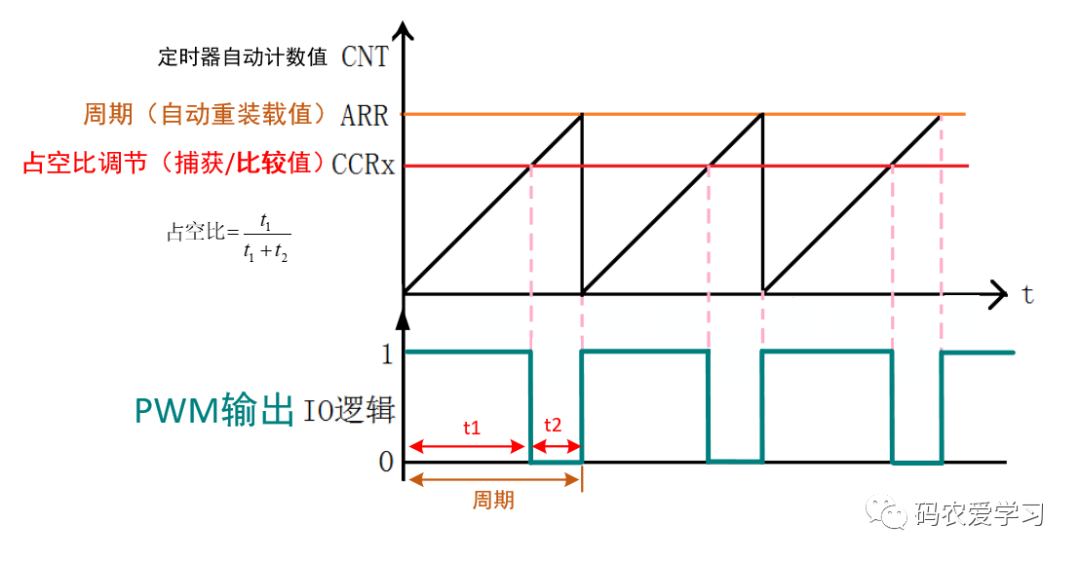
2定時器輸出PWM原理
如下圖是PWM輸出的原理示意圖:
假設定時器工作模式設置為向上計數 PWM模式,且當 CNT《CCRx 時,輸出 1,當 CNT》=CCRx 時輸出 0,則:
當 CNT 值小于 CCRx 的時候, IO 輸出高電平 (1)
當 CNT 值大于等于 CCRx 的時候,IO 輸出低電平 (0)
當 CNT 達到 ARR 值的時候,重新歸零,然后重新向上計數,依次循環。
因此,改變 CCRx 的值,就可以改變 PWM 輸出的占空比,改變 ARR 的值,就可以改變 PWM 輸出的周期(頻率),這就是利用定時器輸出PWM 的基本原理。
3定時器常用的寄存器
使用定時器來輸出PWM時,需要對其寄存器進行相應的設置。定時器的寄存器有好多個,這里先介紹幾個與輸出PWM相關的幾個寄存器,其它是寄存器以后用到時再介紹。
3.1 控制寄存器CR1
控制寄存器,就是來設置定時的工作模式:

位 15:10 保留,必須保持復位值。
位 9:8 CKD:時鐘分頻 (Clock division)此位域指示定時器時鐘 (CK_INT) 頻率與數字濾波器所使用的采樣時鐘(ETR、TIx)之間的分頻比,
位 7 ARPE:自動重載預裝載使能 (Auto-reload preload enable)
0:TIMx_ARR 寄存器不進行緩沖
1:TIMx_ARR 寄存器進行緩沖
位 6:5 CMS:中心對齊模式選擇 (Center-aligned mode selection),包括1種邊沿對齊模式與3種中心對齊模式
位 4 DIR:計數器方向 (Direction),0為遞增計數,1為遞減計數。
注:當定時器配置為中心對齊模式或編碼器模式時,該位為只讀狀態。
位 3 OPM:單脈沖模式 (One-pulse mode)
位 2 URS:更新請求源 (Update request source)
此位由軟件置 1 和清零,用以選擇 UEV 事件源。
位 1 UDIS:更新禁止 (Update disable)此位由軟件置 1 和清零,用以使能/禁止 UEV 事件生成。
位 0 CEN:計數器使能 (Counter enable),0為禁止計數器,1為使能計數器
只有事先通過軟件將 CEN 位置 1,才可以使用外部時鐘、門控模式和編碼器模式。而觸發模式可通過硬件自動將 CEN 位置 1。在單脈沖模式下,當發生更新事件時會自動將 CEN 位清零。
3.2 捕獲/比較模式寄存器CCMR1
這些通道可用于輸入(捕獲模式)或輸出(比較模式)模式。通道方向通過配置相應的 CCxS 位進行定義。此寄存器的所有其它位在輸入模式和輸出模式下的功能均不同。對于任一給定位
OCxx 用于說明通道配置為輸出時該位對應的功能
ICxx 則用于說明通道配置為輸入時 該位對應的功能
因此,必須注意同一個位在輸入階段和輸出階段具有不同的含義。

這里僅先介紹輸出模式下的功能:
位 15 OC2CE:輸出比較 2 清零使能 (Output compare 3 clear enable)
位 14:12 OC2M[2:0]:輸出比較 2 模式 (Output compare 2 mode)
位 11 OC2PE:輸出比較 2 預裝載使能 (Output compare 2 preload enable)
位 10 OC2FE:輸出比較 2 快速使能 (Output compare 2 fast enable)
位 9:8 CC2S[1:0]:捕獲/比較 2 選擇 (Capture/Compare 2 selection)參考下面的CC1S通道1
位 7 OC1CE:輸出比較 1 清零使能 (Output compare 3 clear enable)
OC1CE:輸出比較 1 清零使能 (Output Compare 1 Clear Enable)
0:OC1Ref 不受 ETRF 輸入影響
1:ETRF 輸入上檢測到高電平時, OC1Ref 立即清零。
位 6:4 OC1M:輸出比較 1 模式 (Output compare 1 mode)一共可配置位7種模式,這里僅介紹2種:
110:PWM 模式 1––在遞增計數模式下,只要 TIMx_CNT《TIMx_CCR1,通道 1 便為有效狀態,否則為無效狀態。在遞減計數模式下,只要 TIMx_CNT》TIMx_CCR1,通道 1 便為無效狀態 (OC1REF=0),否則為有效狀態 (OC1REF=1)。
111:PPWM 模式 2––在遞增計數模式下,只要 TIMx_CNT《TIMx_CCR1,通道 1 便為無效狀態,否則為有效狀態。在遞減計數模式下,只要 TIMx_CNT》TIMx_CCR1,通道 1 便為有效狀態,否則為無效狀態。
位 3 OC1PE:輸出比較 1 預裝載使能 (Output compare 1 preload enable)
0:禁止與 TIMx_CCR1 相關的預裝載寄存器。可隨時向 TIMx_CCR1 寫入數據,寫入后將立即使用新值。
1:使能與 TIMx_CCR1 相關的預裝載寄存器。可讀/寫訪問預裝載寄存器。TIMx_CCR1 預裝載值在每次生成更新事件時都會裝載到活動寄存器中。
位 2 OC1FE:輸出比較 1 快速使能 (Output compare 1 fast enable)
此位用于加快觸發輸入事件對 CC 輸出的影響(僅當通道配置為 PWM1 或 PWM2 模式時,OCFE 才會起作用)。
0:即使觸發開啟,CC1 也將根據計數器和 CCR1 值正常工作。觸發輸入出現邊沿時,激活CC1 輸出的最短延遲時間為 5 個時鐘周期。
1:觸發輸入上出現有效邊沿相當于 CC1 輸出上的比較匹配。隨后,無論比較結果如何,OC 都設置為比較電平。采樣觸發輸入和激活 CC1 輸出的延遲時間縮短為 3 個時鐘周期。
位 1:0 CC1S[1:0]:捕獲/比較 1 選擇 (Capture/Compare 1 selection)
此位域定義通道方向(輸入/輸出)以及所使用的輸入。
00:CC1 通道配置為輸出。
01:CC1 通道配置為輸入,IC1 映射到 TI1 上。
10:CC1 通道配置為輸入,IC1 映射到 TI2 上。
11:CC1 通道配置為輸入,IC1 映射到 TRC 上。此模式僅在通過 TS 位(TIMx_SMCR 寄存器)選擇內部觸發輸入時有效
注:僅當通道關閉時(TIMx_CCER 中的 CC1E = 0),才可向 CC1S 位寫入數據。
3.3 計數器CNT
計數器的功能很單一,就是計數:

位 15:0 CNT[15:0]:計數器值 (Counter value)
3.4 預分頻器PSC
預分頻器的功能也很單一,就是分頻:

位 15:0 PSC[15:0]:預分頻器值 (Prescaler value)
計數器時鐘頻率 CK_CNT 等于 fCK_PSC / (PSC[15:0] + 1)。
PSC 包含在每次發生更新事件時要裝載到實際預分頻器寄存器的值。
3.5 自動重裝載寄存器ARR
自動重裝載寄存器的功能也很單一,就是保存一個數,在計數滿的時候,重新開始計數

位 15:0 ARR[15:0]:自動重載值 (Auto-reload value)
ARR 為要裝載到實際自動重載寄存器的值。
當自動重載值為空時,計數器不工作。
3.6 捕獲/比較寄存器CCR
自動重裝載寄存器的功能也很單一,也是保存一個數,用于與當前的CNT進行比較,注意 TIM2 和 TIM5是32位計數。
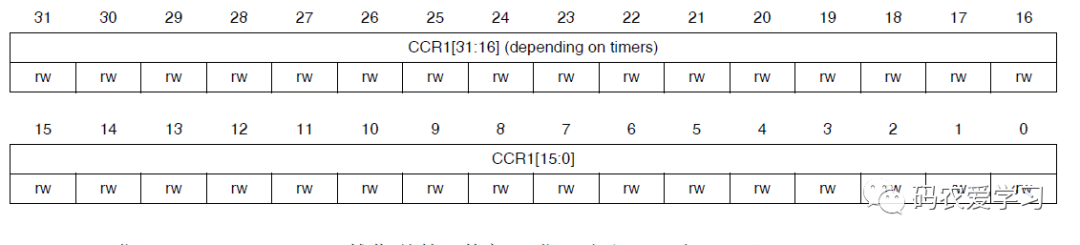
以CCR1寄存器(一共有CCR1~CCR4這4個通道)為例:
位31:16 CCR1[31:16]:捕獲/比較 1 的高 16 位(對于 TIM2 和 TIM5)。
位15:0 CCR1[15:0]:捕獲/比較 1 的低 16 位 (Low Capture/Compare 1 value)
如果通道 CC1 配置為輸出:CCR1 是捕獲/比較寄存器 1 的預裝載值。如果沒有通過 TIMx_CCMR寄存器中的OC1PE 位來使能預裝載功能,寫入的數值會被直接傳輸至當前寄存器中。否則只在發生更新事件時生效(拷貝到實際起作用的捕獲/ 比較寄存器1)。實際捕獲/比較寄存器中包含要與計數器 TIMx_CNT進行比較并在 OC1 輸出上發出信號的值。
如果通道 CC1 配置為輸入:CCR1 為上一個輸入捕獲 1 事件 (IC1) 發生時的計數器值。
44代碼實現與分析
上面介紹了定時器的基礎知識與PWM的輸出原理,下面就來實際看一下,如何編寫對應的代碼(以STM32F407為例)。
4.1 定時器初始化
定時器的初始化,因為需要用到對應的引腳輸出PWM,因此要先初始化GPIO引腳,然后,還要初始化定時器的時基(計數的時鐘)以及輸出通道(用于配置PWM的輸出模式)。
4.1.1 復用引腳初始化
這里用到的是定時器3,根據STM32F407的數據手冊“3 Pinouts and pin description”中的“Table 9. Alternate function mapping”復用引腳說明表,可以看到定時器3通道1對應的引腳位A6:
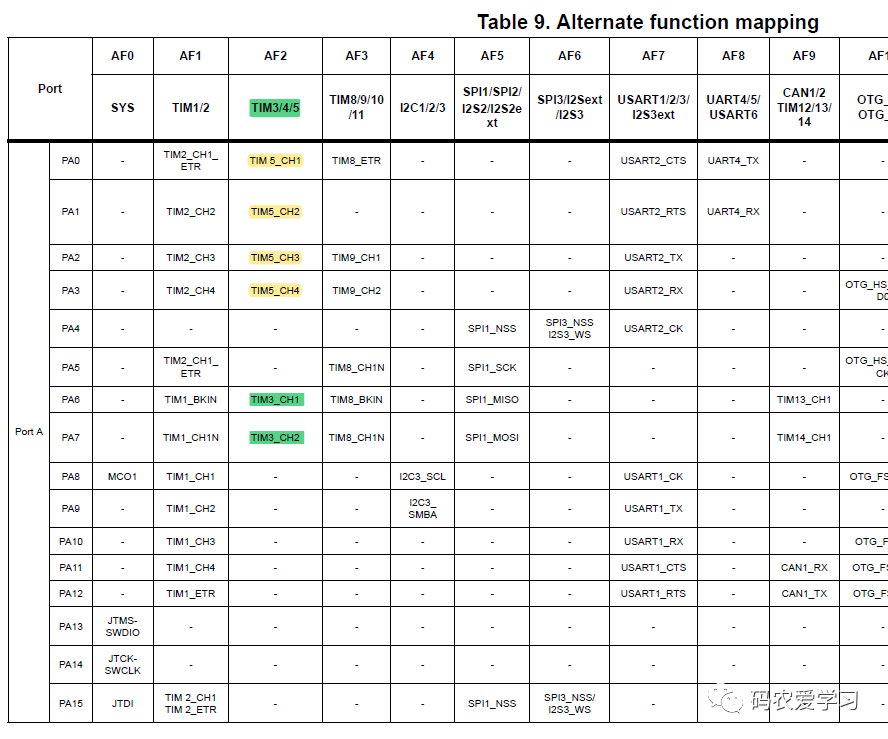
因此程序中對A6引腳可以這樣配置,注意一定要配置引腳的復用功能:
GPIO_InitTypeDef GPIO_InitStructure; /*引腳配置 結構體*/
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能PORTA時鐘GPIO_PinAFConfig(GPIOA,GPIO_PinSource6,GPIO_AF_TIM3); /*GPIOA6復用為定時器3*/
/*復用引腳配置*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIOA6GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; /*復用功能*/GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA6
4.1.2 時基初始化
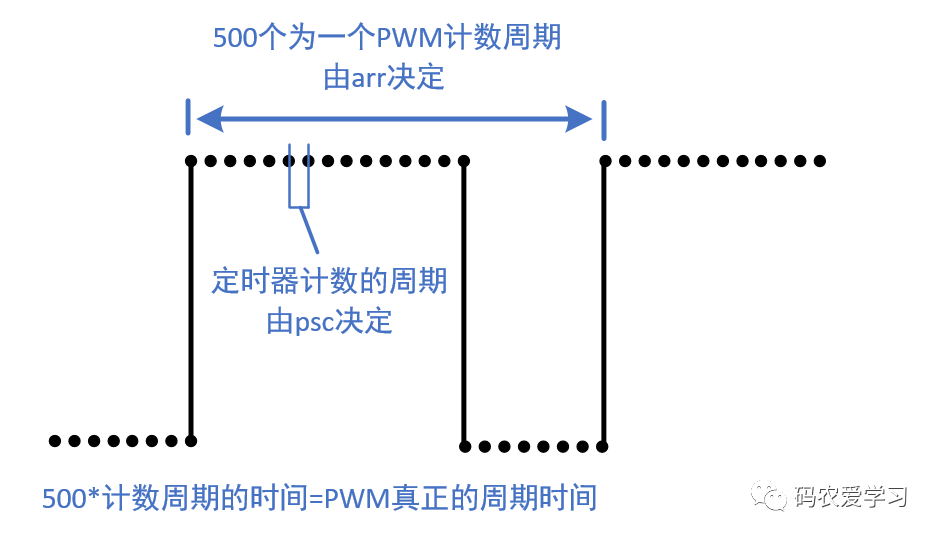
時基初始化,主要是配置定時器的計數頻率(psc)和自動重裝置值(每次計數的周期,arr),比如TIM3_PWM_Init(500-1,84-1);
(關于psc與arr的知識點,可以再回顧一下上面1.3節的知識)
這里將arr的值設置為500,即計數器每計夠500個數就會重新從0開始計數,這個500再乘以計數器計數的周期,就是PWM真正的周期,那計數器計數的頻率是多少呢(頻率的倒數為周期)?
這里將psc的值設置為84-1,即TIM3的輸入頻率為84MHz再將頻率降低1/84,即使用1MHz的頻率計數(1s能計1,000,000個數,也即1us計1個數),那么PWM的真正周期就是500*1us=500us(0.5ms),通過改變占空比的值(ccr),就可以調節PWM的輸出占空比。
時基初始化配置如下:
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; /*時基 結構體*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //TIM3時鐘使能
/*時基初始化*/TIM_TimeBaseStructure.TIM_Period=arr; /*ARR 自動重裝載值(周期),例如500*/TIM_TimeBaseStructure.TIM_Prescaler=psc; /*PSC 定時器分頻,例如84*/TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; /*時鐘分割*/TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; /*向上計數模式*/TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure); /*初始化定時器3*/
最后一句的時基初始化,起始就是對定時的寄存器進行配置,該函數的內部實現如下:
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct){ uint16_t tmpcr1 = 0; tmpcr1 = TIMx-》CR1;
if((TIMx == TIM1) || (TIMx == TIM8)|| /*高級定時器TIM和TIM8*/ (TIMx == TIM2) || (TIMx == TIM3)||(TIMx == TIM4) || (TIMx == TIM5)) /*通用定時器中的TIM2~TIM5*/ { /* 設置為計數器模式 */ tmpcr1 &= (uint16_t)(~(TIM_CR1_DIR | TIM_CR1_CMS)); tmpcr1 |= (uint32_t)TIM_TimeBaseInitStruct-》TIM_CounterMode; } if((TIMx != TIM6) && (TIMx != TIM7)) /*基本定時器TIM6和TIM7無此功能*/ { /* 設置時鐘分頻 */ tmpcr1 &= (uint16_t)(~TIM_CR1_CKD); tmpcr1 |= (uint32_t)TIM_TimeBaseInitStruct-》TIM_ClockDivision; }
/* 配置CR1寄存器 */ TIMx-》CR1 = tmpcr1;
/* 配置ARR寄存器,設置自動重轉載值 */ TIMx-》ARR = TIM_TimeBaseInitStruct-》TIM_Period ; /* 配置PSC寄存器,設置預分頻值 */ TIMx-》PSC = TIM_TimeBaseInitStruct-》TIM_Prescaler; if ((TIMx == TIM1) || (TIMx == TIM8)) /*高級定時器TIM和TIM8*/ { /* 配置RCR寄存器,設置重復計數值 */ TIMx-》RCR = TIM_TimeBaseInitStruct-》TIM_RepetitionCounter; }
/* 生成一個更新事件來立即重新加載預分頻器和重復計數器(僅針對高級定時器TIM1和TIM8)值 */ TIMx-》EGR = TIM_PSCReloadMode_Immediate; }
4.1.3 輸出通道初始化
輸出通道初始化,主要是配置輸出的一些參數,這里主要關注TIM_OCMode(模式)與TIM_OCPolarity(極性),這兩個參數是配合使用的:
PWM模式1
向上計數時,一旦TIMx_CNT《TIMx_CCR1時通道1為有效電平,否則為無效電平;
向下計數時,一旦TIMx_CNT》TIMx_CCR1時通道1為無效電平,否則為有效電平。
PWM模式2
向上計數時,一旦TIMx_CNT《TIMx_CCR1時通道1為無效電平,否則為有效電平;
向下計數時,一旦TIMx_CNT》TIMx_CCR1時通道1為有效電平,否則為無效電平。
這里的有效電平又是什么意思呢?怎么算有效電平?它就是通過極性來配置的:
輸出High模式:有效電平為高電平
輸出Low模式:有效電平為低電平
對比著再來看這張圖:
當CNT的計數值小于CCR時,即t1這個時間段,輸出有效電平(TIM_OCMode_PWM1模式),而有效電平是高電平(極性為TIM_OCPolarity_High),所以PWM的IO邏輯在t1這個時間段輸出了高電平。
輸出通道的配置如下:
TIM_OCInitTypeDef TIM_OCInitStructure; /*輸出通道 結構體*//*輸出通道初始化,初始化TIM3 Channel1 PWM模式*/ TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; /*選擇定時器模式:TIM脈沖寬度調制模式1*/TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; /*輸出極性:TIM輸出比較極性高*/TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根據指定的參數初始化外設TIM3 OC1
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); /*使能TIM3在CCR1上的預裝載寄存器*/TIM_ARRPreloadConfig(TIM3,ENABLE);/*ARPE使能:使能控制寄存器CR的第8位:ARPR, Auto-reload preload enable*/TIM_Cmd(TIM3, ENABLE); /*使能TIM3:使能控制寄存器CR的第0位:CEN, counter enable*/
關于配置CCMR1、CCER寄存器
CCMR1:
CCER:

TIM_OC1Init函數對應于輸入通道的初始化,其實就是操作CCMR1、CCER等寄存器:
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct){ uint16_t tmpccmrx = 0, tmpccer = 0, tmpcr2 = 0; TIMx-》CCER &= (uint16_t)~TIM_CCER_CC1E;/* 關閉通道1: 復位CC1E位 */ tmpccer = TIMx-》CCER;/* 獲取 TIMx CCER 寄存器的值 */ tmpcr2 = TIMx-》CR2; /* 獲取 TIMx CR2 寄存器的值 */
tmpccmrx = TIMx-》CCMR1;/* 獲取TIMx CCMR1 寄存器的值 */ tmpccmrx &= (uint16_t)~TIM_CCMR1_OC1M; /* 復位輸出比較模式OC1M位 */ tmpccmrx &= (uint16_t)~TIM_CCMR1_CC1S; tmpccmrx |= TIM_OCInitStruct-》TIM_OCMode;/* 設置為輸出比較模式 */ tmpccer &= (uint16_t)~TIM_CCER_CC1P; /* 復位輸出極性CC1P */ tmpccer |= TIM_OCInitStruct-》TIM_OCPolarity; /* 設置輸出極性 */ tmpccer |= TIM_OCInitStruct-》TIM_OutputState; /* 設置輸出狀態 */ if((TIMx == TIM1) || (TIMx == TIM8)) /*高級定時器的特殊配置*/ { //省略。。。 } TIMx-》CR2 = tmpcr2; /* 寫數據到TIMx的CR2寄存器 */ TIMx-》CCMR1 = tmpccmrx; /* 寫數據到TIMx的CCMR1寄存器 */ TIMx-》CCR1 = TIM_OCInitStruct-》TIM_Pulse;/* 設置CCR1寄存器 */ TIMx-》CCER = tmpccer; /* 寫數據到TIMx的CCER寄存器 */}
4.2 動態改變占空比
占空比是通過修改CCR寄存器的值進行修改的,如果定時器初始化時只設置了1次CCR的值,那么會輸出恒定占空比的PWM波;如果在定時器運行的時候,動態修改CCR的值,則可以實現PWM占空比的動態調整。
如下程序,實現了每隔10ms對占空比進行一次修改,每次將高電平計數值增加5,當增大道500(占空比100%)時,再逐漸減小到0(占空比0%),不斷循環。
u16 led0pwmval=0; u8 dir=1;TIM3_PWM_Init(500-1,84-1); //84M/84=1Mhz的計數頻率,重裝載值500,所以PWM頻率為 1M/500=2Khz. while(1) //實現比較值從0-500遞增,到500后從500-0遞減,循環{ delay_ms(10);
if(dir) { led0pwmval+=5; //dir==1 led0pwmval遞增 } else { led0pwmval-=5; //dir==0 led0pwmval遞減 } if(led0pwmval》500) { dir=0; //led0pwmval到達500后,方向為遞減 } if(led0pwmval==0) { dir=1; //led0pwmval遞減到0后,方向改為遞增 }
TIM_SetCompare1(TIM3,led0pwmval); /*CCR 修改比較值(占空比)*/}
5 測試效果
將程序下載到板子,我用的一塊STM32F407的板,A6引腳上接了一個LED燈,實際效果的LED逐漸變亮,再逐漸變暗,依次循環。
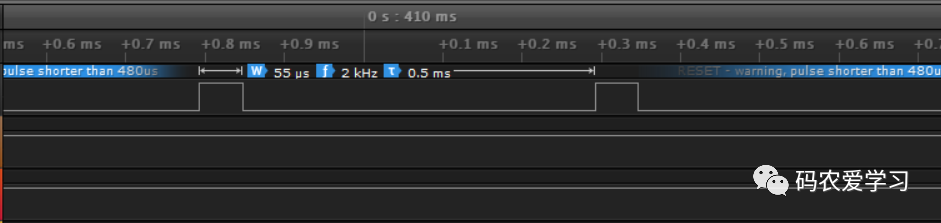
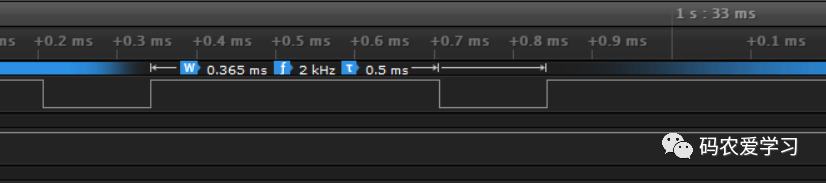
再通過邏輯分析儀來查看實際的輸出波形,如下圖,測得的pwm周期0.5ms(頻率2kHz),與軟件中設定的一致。
在某一時刻,脈寬55us。
在另一時刻,脈寬0.365ms,即實現了PWM脈寬的動態調整。
編輯:lyn
-
電機控制
+關注
關注
3536文章
1881瀏覽量
268924 -
定時器
+關注
關注
23文章
3251瀏覽量
114980 -
代碼
+關注
關注
30文章
4798瀏覽量
68714
發布評論請先 登錄
相關推薦
定時器的工作方式介紹
與定時器相關的寄存器有哪些類型
神經網絡的基本原理
相同的代碼,不同的工程出現定時器搶占的現象怎么解決?
如何實現一個軟件定時器?
s7200定時器的五種故障介紹
?PLC保持型通電延時定時器TONR

?PLC定時器介紹

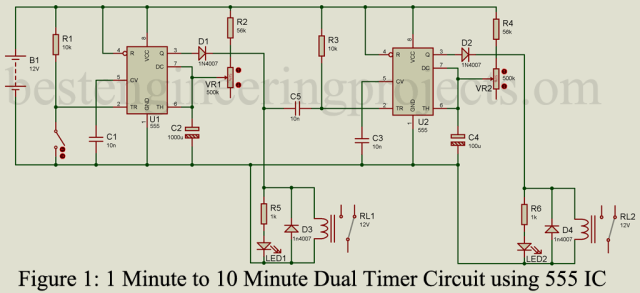
使用555定時器的可調雙定時器電路
定時器原理能控制馬達嗎為什么
555定時器的基本功能 555定時器的工作原理及其應用

AWTK 開源串口屏開發(6) - 定時器的用法






 工商網監
工商網監
評論