 基于S7-400 PLC實現岸橋控制系統的設計
基于S7-400 PLC實現岸橋控制系統的設計
1. 概述
由于PLC控制系統可靠,方便等特點,其已在集裝箱起重機上廣泛使用,目前已取代了早期的繼電器控制回路系統。同時由于總線系統的發展,PLC所需采集的各類開關,傳感器信號可以通過遠程I/O站實現,大大節省了電纜布線成本,也節約了故障查詢時間。本文主要闡述的就是岸橋控制系統的核心內容設計:岸橋PLC程序的設計與實現。
在這套系統中,控制系統的主要元件PLC是采用了SIEMENS公司的S7-400作為PLC主站,ET200作為遠程模塊站。整個系統通過PROFIBUS總線將PLC主站與各遠程模塊站及控制傳動機構的變頻器相連,見如下單線圖1-1所示:
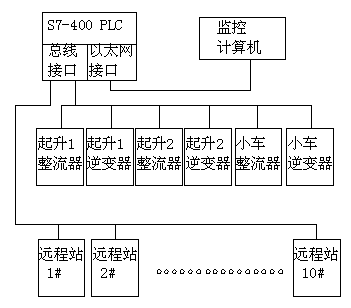
圖1-1:以PLC為核心的岸橋電氣控制系統圖
圖1-1中,S7-400 PLC是整個系統的核心所在,它有兩個PROFIBUS總線接口,一條總線連接所有傳動機構變頻器(變頻器由整流器與逆變器組成),這樣一來變頻器所需要的命令,運行狀態的反饋等信號均可以通過PROFIBUS通訊來實現。另一條總線則連接所有的I/O遠程站,實現采集信號和輸出信號,大大節約了布線。PLC同時也帶有以太網接口,可以方便的與計算機連接,這樣一來工程技術人員可以通過計算機的人機界面來監控岸橋的運行,同時該計算機也可以作為編程器,用來配置PLC硬件,修改PLC程序。
2. 岸橋PLC程序編寫
對岸橋的PLC系統來說,其需要控制的內容有岸橋的起升, 大車, 小車, 俯仰這四個主要機構的運行與輔助機構的運行,四個主要機構都有相同的運行過程,如下圖2-1所示:
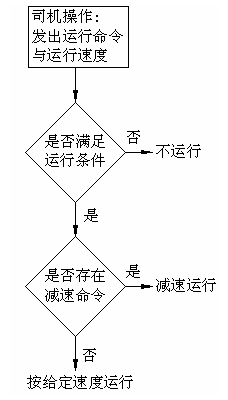
圖2-1:岸橋主要機構運行過程
因此在這過程中的“是否滿足運行條件”與“是否存在減速命令”是編寫岸橋PLC程序所必須清楚的情況,我們在這里必須通過工況分析,有了清楚的了解之后,才能正確的編寫程序。以下我們將以起升機構為例,對工況進行詳細的分析。
2.1. 岸橋起升機構工況分析
2.1.1. 岸橋起升機構的組成
起升機構的主要作用是通過鋼絲繩與吊具上的滑輪將吊具作上下的移動。當吊具吊了集裝箱之后,集裝箱就可以通過起升機構實現上下移動,比如將集裝箱從船艙或集裝箱卡車上提取。起升機構的組成除了吊具與鋼絲繩之外,還包括兩套并行連接的機械傳動裝置,每套傳動裝置的組成如圖2-2所示:有一個交流電機聯接一個減速箱。在電機與減速箱之間的主軸上裝有一個液壓推桿盤式制動器。電機非驅動側出軸安裝有測速編碼器和超速開關。在卷筒的一側出軸上裝有一個凸輪限位開關。
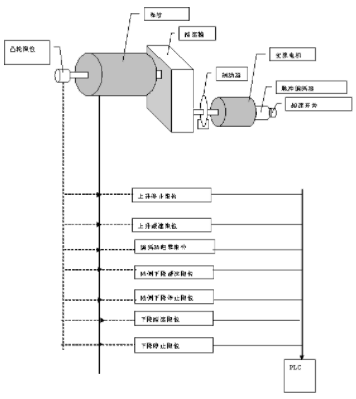
圖2-2:起升傳動機構組成
2.1.2. 岸橋起升機構的運行控制
起升機構運行過程控制如下:
l PLC采集司機發出的運行指令及速度給定指令。
l 通過PLC程序進行邏輯判斷,判斷是否滿足“運行允許”的情況。
l 如果PLC程序邏輯判斷滿足“運行允許”的情況,接下來要進行的就是起升速度的處理,其處理如下:
n 如果不存在減速運行命令,則傳動機構按司機給定的速度運行。
n 如果PLC收到減速運行信號,PLC則將速度處理為司機給定速度的10%。
l 最終,PLC需將這些運行命令,運行速度通過PROFIBUS總線傳輸給變頻器,變頻器帶動電機運行,實現起升機構的運行。
2.2. 程序編寫
2.2.1. Symbol表的編寫
在編寫PLC程序之前,對于I/O 變量, 由于其在原理圖上已定義, 我們可以先將其在SYMBOLS中輸入。
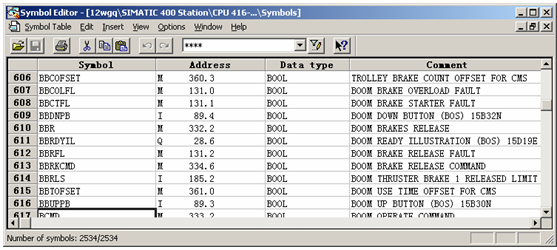
圖2-1:SYMBOLS表
2.2.2. 岸橋起升運行程序
下面我們以起升機構為例, 編寫一段岸橋起升運行程序。
步驟一:編寫“起升允許”程序。我們編寫的“起升允許”程序如下圖2-2所示:
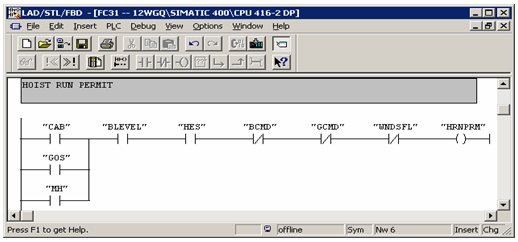
圖2-2:編寫 “起升允許”程序
步驟二:編寫“起升命令控制”程序。當起升機構滿足了“起升允許“,PLC就可以發出起升向上/下的命令。如圖2-3所示:
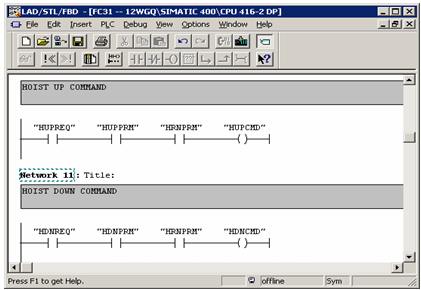
圖2-3:起升運行命令
步驟三:編寫“起升速度的控制”程序。在這段程序中:當司機在駕駛室把控制電源合上,并發出起升命令,如果有減速命令存在,則將給定值變為原來的10%,程序如下圖2-4所示。
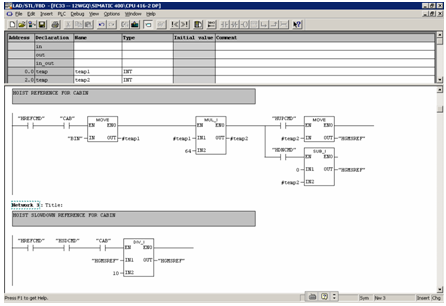
圖2-4:速度給定信號處理
步驟四:編寫“起升命令與速度控制”程序。以上的程序完成了岸橋起升運行的命令和速度給定的產生,最終我們就是要將這命令與速度給定通過PROFIBUS總線傳輸給變頻器,如圖2-6是調用了西門子公司功能塊庫中的一個PROFIBUS數據傳送功能塊PCD_SEND,用來傳送數據塊DB123中的16個字。。
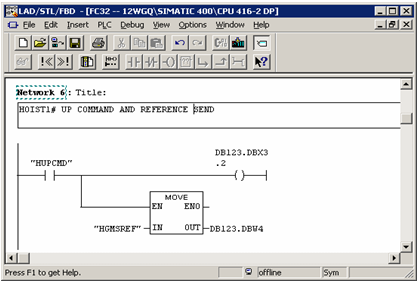
圖2-5升命令與速度控制
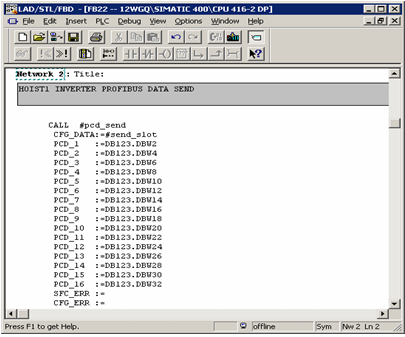
圖2-6總線數據傳輸
2.2.3. 岸橋主要機構程序對應的功能FC(Function)
以上分析了岸橋起升機構的程序編寫,與起升機構的程序類似, 岸橋的大車, 小車, 俯仰機構程序也要處理運行允許, 命令與速度給定,數據傳輸等。為了使整個項目程序結構清晰,我們將各個功能細分,如下圖3-14所示是:主要機構運行控制的功能FC,以及用于命令與速度給定傳輸的PROFIBUS總線數據傳輸功能塊FB:
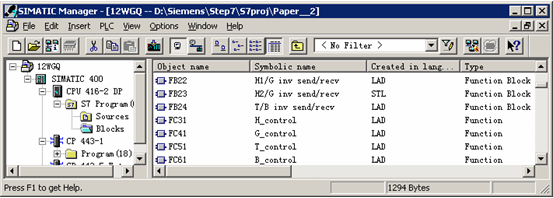
圖2-7:岸橋主要機構對應功能FC
這些功能FC的作用如下:
l FB22 起升/大車1#變頻器PROFIBUS總線數據傳輸
l FB23 起升/大車2#變頻器PROFIBUS總線數據傳輸
l FB24 小車/俯仰變頻器PROFIBUS總線數據傳輸
l FC31 起升運行控制
l FC41 大車運行控制
l FC51 小車運行控制
l FC61 俯仰運行控制
2.2.4. 岸橋輔助機構的運行程序
在岸橋上還有一些輔助機構需由PLC程序來控制。這些功能FC如下圖2-8所示:
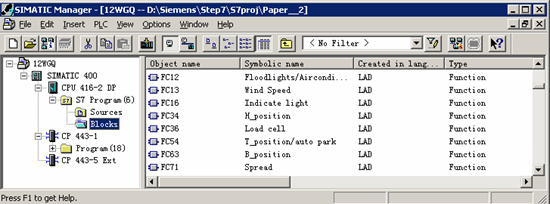
圖2-8:輔助機構控制
這些功能FC的作用如下:
l FC12 投光燈,空調的啟動,停止控制。
l FC13 風速處理:當風速達到警報值時發出信號。
l FC16 指示燈顯示:控制各個操作站的指示燈。
l FC34 起升編碼器位置處理:判斷起升上下的停止,減速位置等。
l FC36 負載重量處理:判斷負載是否超過額定。
l FC54 小車編碼器位置處理:判斷小車前后的停止,減速位置等。
l FC63 俯仰編碼器位置處理:判斷俯仰上下的停止,減速位置等。
l FC71 吊具控制:吊具在起吊集裝箱時的控制,如吊具鎖頭的開閉功能。
結合岸橋主要機構,輔助機構控制的功能FC,以及PROFIBUS總線通訊數據傳輸的功能塊FB等,完成了岸橋PLC程序的設計。
3. PLC程序的統一性問題
3.1. PLC程序統一性問題的發現
在岸橋的PLC程序編寫完成后,我們隨即在岸橋上進行了調試,由此發現了程序的統一性問題,該問題是這樣的:我們所進行的這個項目有12臺岸橋,在岸橋上,有些數據的定義需根據現場的實際情況來定義,舉一簡單的例子:
比如小車機構位置編碼器的零位數據OFFSET,對于調試的第一臺岸橋,我們可以很容易加以這樣定義:將小車機構行駛到最后面的終點位置,讀出小車在該位置時位置編碼器的讀數,以此作為小車機構位置編碼器的零位數據OFFSET。但我們在調試第二臺岸橋時發現,由于機械安裝的誤差,第二臺小車機構行駛到最后面的終點位置時,讀出的小車位置編碼器讀數與第一臺岸橋的數值不相同。也就是說,我們必須將第二臺岸橋的小車機構位置編碼器的零位數據OFFSET設置成不一樣的數據。
與此有相同問題的數據還有諸如重量傳感器的比例系數,小車自動停車時停車位置點,俯仰機構的上升終點位置等等。這些問題都產生了一個后果,調試結束后每臺岸橋都有對應的PLC程序,彼此之間不統一。
3.2. 解決PLC程序統一性問題的分析
分析這個問題,我們設想了以下解決問題的方法:
n 我們可以增加設計這樣一段解決問題的“岸橋編號識別”程序:首先讓各臺岸橋編號:比如岸橋1,岸橋2。。。。。。岸橋12,PLC程序運行“岸橋編號識別”程序來判定該岸橋的編號,如果是岸橋1,“岸橋編號識別”程序就執行將岸橋1的數據裝載到一“共用數據塊”。
“岸橋編號識別”執行完畢后,我們所需要的數據都在這“共用數據塊”中,之后PLC在程序運行時,如需要用到那些各臺岸橋有差異的數據,就可以從該“共用數據塊”中讀取所需要的數據。整個過程如圖3-1所示:
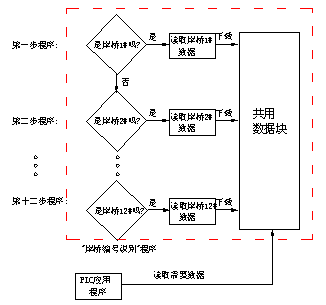
圖3-1:“岸橋編號識別”程序
3.3. PLC程序統一性問題的處理
有了以上的思路,接下來我們就著手開始解決這個PLC程序統一性問題:
l 第一步:對岸橋進行編號:
將岸橋定義為岸橋1# 至岸橋12# ,但是如果要讓PLC能夠識別這些編號,那么我們必須設置輸入信號送給PLC,我們利用了一個備用的輸入字節IB256來定義岸橋的編號,在PLC系統的硬件輸入上,我們按此定義對各臺岸橋接入高電平,每臺岸橋不同,如下圖3-2所示:
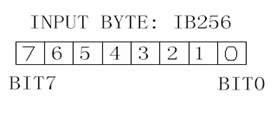
位(BIT)
岸橋編號
7
6
5
4
3
2
1
0
岸橋1#00000001
岸橋2#00000010
岸橋3#00000011
岸橋4#00000100
岸橋5#00000101
岸橋6#00000110
岸橋7#00000111
岸橋8#00001000
岸橋9#00001001
岸橋10#00001010
岸橋11#00001011
岸橋12#00001100
圖3-2:對岸橋進行編號
l 在程序中為每臺岸橋設置一個DB數據塊(DATABASE),分別為DB201~DB212,分別對應岸橋1~12的數據,如下圖3-3所示:
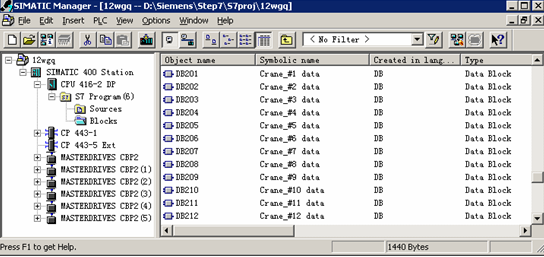
圖3-3:岸橋1~12數據塊
l 編寫“岸橋編號識別”程序:創建一功能FC74用于處理不同岸橋編號識別,然后將對應岸橋的數據塊DB20X數據傳輸給一共用數據塊DB74。如下圖3-4所示:當岸橋編號CRANEID是2的時候,將岸橋2的數據塊DB202的44個字節傳輸到共用數據塊DB74中。
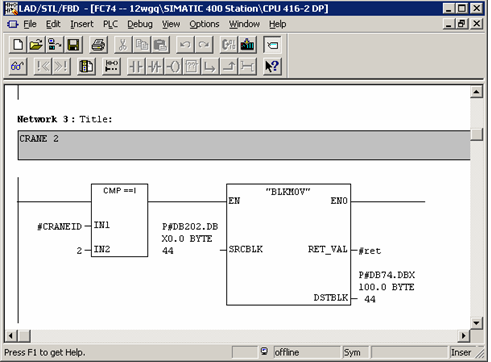
圖3-4:“岸橋編號識別”程序
l PLC讀取共用數據塊中的數據:PLC可以任意讀取共用數據塊中的數據,該數據就是對應相應岸橋的數據,如下圖3-5所示程序:
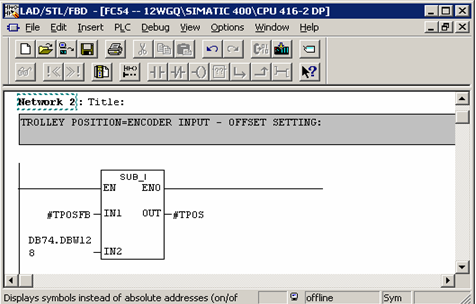
圖3-5:讀取“共用數據塊DB74”數據程序
由此,我們通過程序的修改完全解決了PLC程序統一性的問題,使該PLC程序更加完善,可靠。
4. 應用與結果分析
4.1. PLC程序在岸橋上的應用情況
4.1.1. 實際應用情況
我們將該PLC程序應用于外高橋四期集裝箱碼頭前六臺岸橋設備(整個項目共十二臺)六臺岸橋開始投入使用并成功地使用至今,根據碼頭工程部工程師的反映,該程序運行得非常可靠,從未出現過由于程序原因造成的故障,而且整個程序運行速度快,思路清晰,易于理解,變量名通俗易記,對岸橋的監控,故障查詢方便。同時,由碼頭合資方馬士基船務公司聘請的外方咨詢公司對該程序也進行了鑒定并予以肯定。
4.2. 與其他岸橋PLC程序的比較
在本程序的開發設計和實現中,我們也參考比較了GE,ABB等一些著名電控供應商的岸橋PLC程序:相比而言,我們的PLC程序有如下優點:
l 合理地采用主程序調用子程序的結構,這樣的好處是:
n 整個程序思路清晰:各個主要機構的控制,各個輔助機構的控制,都有相應的子程序,即功能FC來實現。最終這些功能FC在主程序OB1中調用。
n 對岸橋的監控方便,快捷:用戶如果想查找到監控的某一裝置,比如需查看指示燈,那只要找到“指示燈”這一功能FC,將其打開,不用花很多時間就能找到,大大縮短了查找時間。
l 整個程序的變量名采用縮寫,通俗易懂,加上變量附帶的注釋,方便了碼頭工程人員對程序的掌握,而且工程人員很容易記住一些常用的變量名,如起升上升允許的變量命是HUPPRM是HOIST UP PERMIT的縮寫,在熟悉了變量名后,可利用PLC軟件SIMATIC MANAGER自帶的查找功能(GO TO LOCATION),很快找到該變量對應的程序行,進一步縮短查找時間。
l 程序的編寫采用PLC特有的“梯形圖”語言,十分直觀。“梯形圖”語言是一種類型繼電器圖紙表示方法的語言,對電氣工程技術人員來說具有親切感,看程序就象查看原理圖一樣,更容易理解。
l 整個程序簡潔,實用,使用嵌套少。在程序編寫思想上較多地考慮利于用戶監控, 查找與理解,而不是單純從我們怎樣編寫方便的角度出發。
責任編輯:gt
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753080 -
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
plc
+關注
關注
5010文章
13271瀏覽量
463067
發布評論請先 登錄
相關推薦
基于S7-400的污水處理自動控制系統的設計方案
S7-400在發酵啤酒過程系統中的應用
基于S7-400 PLC的控制系統在污水處理中的應用
SIMATIC S7-400
基于S7-400的功能及接線圖
S7-400硬件安裝及連接
S7-400聯網及尋址
使用S7-200PLC控制系統實現A3000的實驗和測試培訓教程
西門子S7-300和S7-400及S7-1200與S7-1500PLC的編程語言比較表
天拓分享:西門子plc S7-300/400系列的PLC通訊





 工商網監
工商網監
評論