") 基于ARTXl66的電子差速算法實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)與驗(yàn)證分析
基于ARTXl66的電子差速算法實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)與驗(yàn)證分析
引言
伴隨著日益嚴(yán)重的大氣污染和能源危機(jī),傳統(tǒng)的交通工具——汽車(chē)的發(fā)展面臨著一系列的挑戰(zhàn)。傳統(tǒng)的內(nèi)燃機(jī)汽車(chē)消耗大量的石油資源,嚴(yán)重污染環(huán)境。這些無(wú)法避免的缺點(diǎn)使人們意識(shí)到,以清潔能源為動(dòng)力的新一代汽車(chē)替代傳統(tǒng)汽車(chē)的重要性,其中的電動(dòng)汽車(chē)技術(shù)已經(jīng)成為當(dāng)今汽車(chē)領(lǐng)域的前沿課題之一。
電動(dòng)汽車(chē)具有零排放,低噪聲,輕便,操控性能好等特點(diǎn)。此外隨著電動(dòng)輪技術(shù)和現(xiàn)場(chǎng)總線技術(shù)的發(fā)展,在電動(dòng)車(chē)上更容易實(shí)現(xiàn)四輪獨(dú)立驅(qū)動(dòng)控制,進(jìn)而為剎車(chē)防抱死系統(tǒng)(ABS)、電子穩(wěn)定系統(tǒng)(ESP)等主動(dòng)安全系統(tǒng)的實(shí)現(xiàn)提供便利。
本文介紹一種基于嵌入式實(shí)時(shí)內(nèi)核ARTXl66的電子差速算法。
1 基于Ackermann轉(zhuǎn)向模型的四輪速度關(guān)系
根據(jù)汽車(chē)動(dòng)力學(xué)分析可知,車(chē)輛轉(zhuǎn)彎行駛時(shí),汽車(chē)外側(cè)車(chē)輪的行程要比內(nèi)側(cè)的長(zhǎng)。如果通過(guò)一根整軸將左右車(chē)輪連接在一起,則會(huì)由于左右車(chē)輪轉(zhuǎn)速雖相等但行程不同而引起一側(cè)車(chē)輪產(chǎn)生滑轉(zhuǎn)或滑移,不僅使輪胎過(guò)早磨損,無(wú)益地消耗功率,并且易使汽車(chē)在轉(zhuǎn)向時(shí)失去抗側(cè)滑的能力而使穩(wěn)定性變壞,操控性變差。為避免上述情況的出現(xiàn),實(shí)現(xiàn)車(chē)輛的平順轉(zhuǎn)向,一般要求所有車(chē)輪在轉(zhuǎn)向過(guò)程中都做純滾動(dòng)。對(duì)四輪獨(dú)立驅(qū)動(dòng)電動(dòng)車(chē)而言,即要求四個(gè)車(chē)輪在轉(zhuǎn)向過(guò)程中具有各自不同的轉(zhuǎn)速,并且各車(chē)輪的轉(zhuǎn)速應(yīng)滿足一定的關(guān)系。該關(guān)系為設(shè)計(jì)汽車(chē)差速系統(tǒng)的主要依據(jù)。低速情況下,這一特定關(guān)系可由Ackermann模型推導(dǎo)得出。
使用Ackermann轉(zhuǎn)向模型進(jìn)行轉(zhuǎn)向時(shí),分析四輪速度關(guān)系的假設(shè)前提條件為:
①剛性車(chē)體;
②車(chē)輪作純滾動(dòng),即不考慮已發(fā)生滑移、滑轉(zhuǎn);
③行駛時(shí)所有輪胎都未離開(kāi)地面;
④輪胎側(cè)向變形與側(cè)向力成正比。
該轉(zhuǎn)向模型如圖1所示。
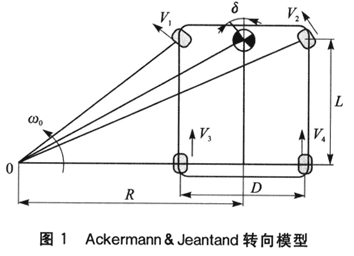
其中,軸距L和兩側(cè)軸線距離D是常數(shù)值,δ是方向盤(pán)的轉(zhuǎn)角,ω0為車(chē)?yán)@轉(zhuǎn)向瞬心的角速度,V1、V2、V3、V4是4個(gè)轉(zhuǎn)動(dòng)輪的速度。由圖1可得:
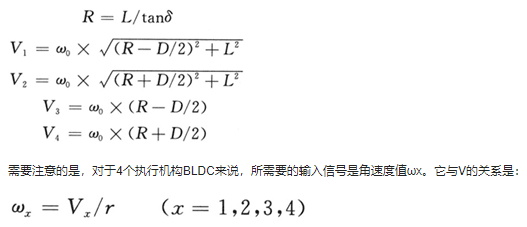
r是輪子的半徑。
在本實(shí)驗(yàn)系統(tǒng)中,將加速手把的轉(zhuǎn)速設(shè)定值ωr(參考角速度)定義為與最大速輪的轉(zhuǎn)速,即左轉(zhuǎn)時(shí),右前輪角速度為ωr;右轉(zhuǎn)時(shí),左前輪角速度為ωr(也可另行定義)。
很顯然,如果在程序中直接套用上面的公式,則運(yùn)算量將非常大,運(yùn)算時(shí)間也會(huì)很長(zhǎng);但可以看出,只要方向盤(pán)的轉(zhuǎn)角δ定,則4個(gè)輪子的轉(zhuǎn)速與參考角速度的比值 ω1/ωr、ω2/ωr、ω3/ωr、ω4/ωr是唯一確定的。所以在程序運(yùn)行當(dāng)中,完全可以預(yù)先將0。到最大轉(zhuǎn)向角問(wèn)分成若干等份,再將不同的δ值對(duì)應(yīng)的4個(gè)速度比率列成表格,用查表與內(nèi)插值的方法簡(jiǎn)化運(yùn)算的過(guò)程。
值得一提的是,上述的算法可以在Matlab/Simulink中搭建模型,它將使表格的查詢與線性內(nèi)插值的處理變得十分方便。整個(gè)算法模型完成之后,還可以利用Matlab的自動(dòng)代碼生成功能,直接生成C語(yǔ)言代碼,嵌入到控制系統(tǒng)當(dāng)中去,這極大地縮短了系統(tǒng)開(kāi)發(fā)的時(shí)間。
2 XCl64CS微處理器
對(duì)于四輪驅(qū)動(dòng)電動(dòng)車(chē)的控制應(yīng)用,要求微處理器提供系統(tǒng)安全和故障保險(xiǎn)機(jī)制,以及有效的措施以降低器件的功耗,并且具有強(qiáng)大的運(yùn)算能力與穩(wěn)定性能,同時(shí)保證系統(tǒng)具有足夠用于整車(chē)系統(tǒng)進(jìn)一步改進(jìn)與升級(jí)所需的資源。為此,選用了Infineon公司的高性能16位微控制器XCl64CS。
XCl64內(nèi)核結(jié)構(gòu)結(jié)合了RISC和CISC處理器的優(yōu)點(diǎn),這種強(qiáng)大的計(jì)算和控制能力通過(guò)MAC單元的DSP功能實(shí)現(xiàn)。XCl64把功能強(qiáng)勁的CPU內(nèi)核和一整套強(qiáng)大的外設(shè)單元集成于一塊芯片上,并有效連接。同時(shí),在XCl64上應(yīng)用的LXBus是眾多總線中的一條,是外部總線接口的內(nèi)部代表。這個(gè)總線為 XCl64的衍生產(chǎn)品集成附加的特殊應(yīng)用外設(shè)提供標(biāo)準(zhǔn)途徑。
3 實(shí)時(shí)操作系統(tǒng)內(nèi)核ARTXl66
由于電子差速器只是中央控制系統(tǒng)功能的一部分,為了提高整車(chē)控制系統(tǒng)的實(shí)時(shí)性與可靠性,同時(shí)便于系統(tǒng)進(jìn)一步的擴(kuò)展(例如電池管理系統(tǒng)、車(chē)燈管理系統(tǒng)),在控制器中采用了嵌入式實(shí)時(shí)操作系統(tǒng)。
實(shí)時(shí)操作是基于并行任務(wù)(進(jìn)程)的思想,將應(yīng)用分解成若干個(gè)獨(dú)立的任務(wù),并將各任務(wù)要做的事、任務(wù)問(wèn)的關(guān)系向?qū)崟r(shí)多任務(wù)內(nèi)核交代清楚,讓實(shí)時(shí)多任務(wù)內(nèi)核去管理這些任務(wù)。
實(shí)驗(yàn)系統(tǒng)中采用的ARTXl66實(shí)時(shí)內(nèi)核是由Keil公司發(fā)布的,一個(gè)易于在英飛凌XCl6x系列微處理器上使用的多任務(wù)實(shí)時(shí)操作系統(tǒng)。它允許建立最多達(dá) 255個(gè)任務(wù),任務(wù)間的切換主要通過(guò)Round-Robin循環(huán)的模式進(jìn)行。這是一種準(zhǔn)并行的方式,將CPU時(shí)間劃分成時(shí)間片,每個(gè)時(shí)間片內(nèi)運(yùn)行一個(gè)任務(wù),由實(shí)時(shí)內(nèi)核按照任務(wù)號(hào)依次將控制權(quán)傳遞給準(zhǔn)備好的任務(wù)。由于時(shí)間片很短,所以看起來(lái)任務(wù)像是同時(shí)在運(yùn)行。
如果Round-Robin循環(huán)模式被用戶禁用,則任務(wù)與任務(wù)間的切換必須通過(guò)調(diào)用os-tsK-pass()函數(shù)來(lái)完成,它將立刻切換到下一個(gè)準(zhǔn)備好的任務(wù)。除此之外,還可以通過(guò)給任務(wù)分配不同的優(yōu)先級(jí),按優(yōu)先級(jí)搶占調(diào)度的時(shí)序運(yùn)行。
在ARTXl66實(shí)時(shí)內(nèi)核中,任務(wù)或進(jìn)程間的通信主要采用了以下4種方法:
①事件標(biāo)記。它主要用于任務(wù)間的同步,每個(gè)任務(wù)分配有多達(dá)16個(gè)事件標(biāo)記,任務(wù)的繼續(xù)(或喚醒)可以選擇等待所有的事件標(biāo)記或是只等待其中的一個(gè)或幾個(gè)。事件標(biāo)記也可以通過(guò)外部中斷程序進(jìn)行設(shè)定,從而與外部事件進(jìn)行同步。
②信號(hào)量。它是載有虛擬令牌的二進(jìn)制信號(hào)量,用于解決多個(gè)任務(wù)占用公共資源的情況。在同一時(shí)間內(nèi),該令牌只能交給一個(gè)任務(wù),避免了任務(wù)間的干擾。沒(méi)有令牌的任務(wù)將處于睡眠狀態(tài),只有在得到令牌之后,該任務(wù)才會(huì)被喚醒。另外,為了防止進(jìn)入錯(cuò)誤狀態(tài),可以為等待令牌設(shè)置一個(gè)時(shí)限。
③互斥鎖。它用于鎖定共同資源,只允許一個(gè)任務(wù)占用,其他任務(wù)是封鎖的,直到互斥鎖被釋放。
④郵箱。它主要用于任務(wù)之間信息的交換。
4 電子差速系統(tǒng)及其控制流程
電子差速系統(tǒng)是一種基于CAN總線的分布式四輪電子差速系統(tǒng)。它由1個(gè)中央控制器、4個(gè)電動(dòng)輪控制器及CAN總線網(wǎng)絡(luò)3個(gè)部分組成。
該分布式系統(tǒng)的電子差速實(shí)時(shí)控制過(guò)程為:中央控制器通過(guò)A/D采樣獲得來(lái)自轉(zhuǎn)向傳感器的車(chē)輛轉(zhuǎn)向角度信號(hào)以及來(lái)自手柄轉(zhuǎn)把中的車(chē)速設(shè)定信號(hào),經(jīng)過(guò)整車(chē)差速算法,分別獲得4個(gè)車(chē)輪當(dāng)前各自應(yīng)有的轉(zhuǎn)速,并將這一結(jié)果作為當(dāng)前時(shí)刻對(duì)應(yīng)車(chē)輪的轉(zhuǎn)速控制設(shè)定值,通過(guò)CAN總線發(fā)送給相應(yīng)的電動(dòng)輪控制器;4個(gè)車(chē)輪控制器以從CAN總線收到的轉(zhuǎn)速設(shè)定值為控制目標(biāo),使用電動(dòng)轉(zhuǎn)速控制算法對(duì)各自的電動(dòng)輪進(jìn)行控制,使各個(gè)電動(dòng)輪的實(shí)際轉(zhuǎn)速實(shí)時(shí)滿足整車(chē)差速算法的要求,進(jìn)而實(shí)現(xiàn)電動(dòng)車(chē)輛的平順轉(zhuǎn)向。
5 電子差速算法仿真平臺(tái)及實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
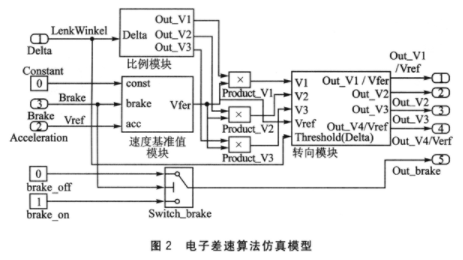
5.1 電子差速算法本體的仿真模型
圖2中,速度基準(zhǔn)值模塊通過(guò)加速信號(hào)等確定Vref(Vref=ωr×r)。Vref為速度基準(zhǔn)值,即轉(zhuǎn)向時(shí)前軸外側(cè)輪的轉(zhuǎn)速值。此輪為4個(gè)輪子中轉(zhuǎn)速最大的輪。比例模塊通過(guò)查表確定各個(gè)輪速與Vref的比例值,轉(zhuǎn)向模塊確定轉(zhuǎn)彎的方向。
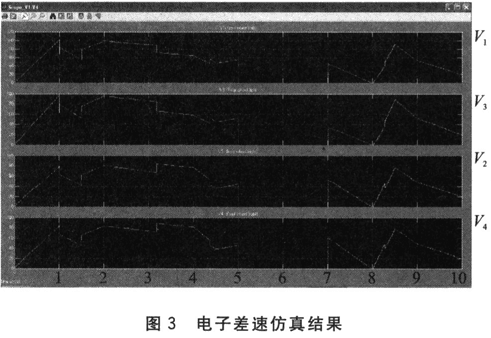
5.2 電子差速算法仿真結(jié)果
在轉(zhuǎn)向、加速、剎車(chē)3種信號(hào)作用下,4個(gè)輪子的轉(zhuǎn)速如圖3所示,從中可以清楚地看出電子差速的效果。在時(shí)間為1時(shí),由于減速,V1、V2、V3、V4同時(shí)減小,同時(shí)由于轉(zhuǎn)向發(fā)生變化,在電子差速作用下,V1、V3瞬時(shí)增大,而V2和V4瞬時(shí)減小,且變化數(shù)值不同。在3和4之間,4和5之間,8和9之間轉(zhuǎn)向也發(fā)生變化,電子差速起作用,V1、V3瞬時(shí)增大或減小,而V2和V4瞬時(shí)減小或增大,且變化數(shù)值不同。在5和7之間由于剎車(chē),各輪速度為O。
5.3 電子差速算法實(shí)驗(yàn)平臺(tái)的設(shè)計(jì)
該實(shí)物實(shí)驗(yàn)系統(tǒng)的結(jié)構(gòu)主要包括:1臺(tái)作為監(jiān)控設(shè)備的PC機(jī)及1輛自行構(gòu)建的具有4個(gè)電動(dòng)輪的低成本電動(dòng)車(chē)實(shí)物模型。這兩個(gè)部分通過(guò)一個(gè)自制的簡(jiǎn)易 CAN/USB網(wǎng)關(guān)相連,構(gòu)成了整個(gè)系統(tǒng)的主體。
PC機(jī)作為該實(shí)驗(yàn)系統(tǒng)中重要的人機(jī)接口之一,用于監(jiān)視及評(píng)價(jià)整個(gè)系統(tǒng)的運(yùn)行狀況。通過(guò)對(duì)電動(dòng)車(chē)實(shí)物模型上CAN總線消息的在線監(jiān)聽(tīng),PC機(jī)可以在不干擾電動(dòng)車(chē)運(yùn)行的前提下實(shí)時(shí)獲得電動(dòng)車(chē)中央控制器、各個(gè)電動(dòng)輪驅(qū)動(dòng)控制器的運(yùn)行情況;還可在PC機(jī)上對(duì)獲得的數(shù)據(jù)進(jìn)行曲線繪制,并且可將接收到的大量有效數(shù)據(jù)保存在PC機(jī)的硬盤(pán)中,為更為復(fù)雜的離線分析提供可能。
CAN/USB網(wǎng)關(guān)是連接本實(shí)驗(yàn)系統(tǒng)中上位PC機(jī)與電動(dòng)車(chē)實(shí)物模型的橋梁,是實(shí)現(xiàn)現(xiàn)場(chǎng)數(shù)據(jù)采集的重要設(shè)備。該網(wǎng)關(guān)完成了CAN總線與USB線的物理接口及協(xié)議轉(zhuǎn)換,具有雙向通信及一定的數(shù)據(jù)緩沖能力;支持USB2.O高速傳輸協(xié)議,通過(guò)編程可以支持傳輸速度最高達(dá)1 Mb/s的CAN總線通信。
5.4 電子差速算法實(shí)驗(yàn)平臺(tái)的試驗(yàn)結(jié)果
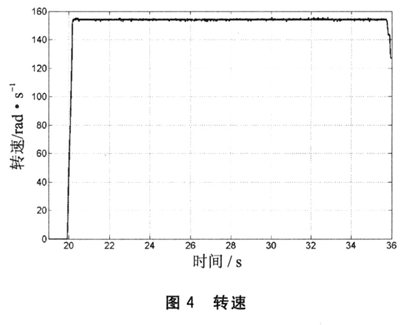
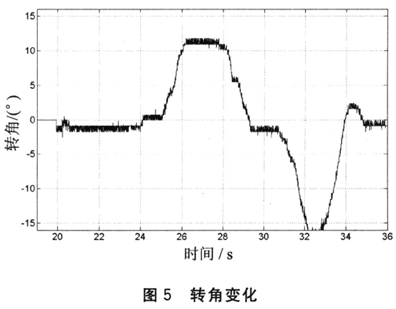
在不考慮加速度信號(hào)的影響下,轉(zhuǎn)角發(fā)生變化時(shí),利用該平臺(tái)得出各輪速度變化。轉(zhuǎn)速設(shè)定如圖4所示,轉(zhuǎn)角變化如圖5所示。
隨著轉(zhuǎn)角的變化,各個(gè)輪子速度變化如圖6所示。
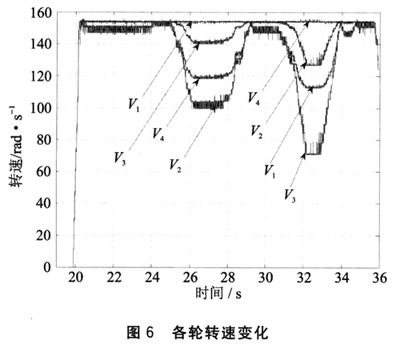
從圖6中可以看出,轉(zhuǎn)角各個(gè)變化過(guò)程中對(duì)應(yīng)各輪速度的變化。當(dāng)轉(zhuǎn)角由O增大到最大值時(shí)(向右轉(zhuǎn)向),V1為前軸外側(cè)輪,速度最大,即V1為 Vref(Vs),此時(shí)的目標(biāo)車(chē)速Vs(V1)為轉(zhuǎn)角為O時(shí)的車(chē)速,故V1保持不變,V2、V2、V4根據(jù)電子差速算法相應(yīng)的減小;當(dāng)轉(zhuǎn)角為最大值時(shí),V2、V3、V4減小的趨勢(shì)停止,隨后轉(zhuǎn)角由最大值減小到0時(shí),V2、V3、V4增大到與V1相同。當(dāng)轉(zhuǎn)角由0減小到最小值時(shí)(向左轉(zhuǎn)向),V4為前軸外側(cè)輪,速度最大,即V4為Vref(Vs),此時(shí)的目標(biāo)車(chē)速Vs(V4)為轉(zhuǎn)角為O時(shí)的車(chē)速,故V4保持不變,V1、V2、V3根據(jù)電子差速算法相應(yīng)的減小;當(dāng)轉(zhuǎn)角為最小值時(shí),V1、V2、V3減小的趨勢(shì)停止,隨后轉(zhuǎn)角由最小值增大到O時(shí),V1、U2、V3增大到與V4相同。
6 結(jié) 論
系統(tǒng)中的電子差速算法是以車(chē)輪轉(zhuǎn)速為控制目標(biāo),此算法較為簡(jiǎn)單。但也存在著一定的問(wèn)題,它只較適合于低轉(zhuǎn)速小轉(zhuǎn)角或直線行駛的情況;在轉(zhuǎn)速和轉(zhuǎn)角都較大時(shí),此時(shí)車(chē)體運(yùn)動(dòng)的離心力產(chǎn)生的側(cè)翻力矩起決定性的作用,可能會(huì)發(fā)生滑轉(zhuǎn),在泥濘等復(fù)雜路況下也難以適用。由于試驗(yàn)的條件所限,無(wú)法采用適合于復(fù)雜路面情況的,基于滑移率或是基于驅(qū)動(dòng)輪附著力的電子差速算法。
責(zé)任編輯:gt
-
電動(dòng)車(chē)
+關(guān)注
關(guān)注
73文章
3007瀏覽量
114048 -
嵌入式
+關(guān)注
關(guān)注
5082文章
19111瀏覽量
304844 -
能源
+關(guān)注
關(guān)注
3文章
1652瀏覽量
43476
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
人臉檢測(cè)算法及新的快速算法
尋找一個(gè)現(xiàn)成的PMSM控制算法驗(yàn)證平臺(tái)?
求一種基于嵌入式實(shí)時(shí)內(nèi)核ARTXl66的電子差速算法
步進(jìn)電機(jī)梯形加減速算法的原理是什么
步進(jìn)電機(jī)梯形勻加速算法是什么
***的步進(jìn)電機(jī)調(diào)速算法~ 精選資料推薦
分享一種超級(jí)實(shí)用的步進(jìn)電機(jī)調(diào)速算法
一種求解電大平臺(tái)天線互耦的時(shí)域積分方程快速算法
基于H.264 的子帶DCT快速算法
改進(jìn)的基于橢圓曲線的簽名驗(yàn)證快速算法
數(shù)控系統(tǒng)線性加減速算法分析與實(shí)現(xiàn)
基于查表的無(wú)乘法DCT快速算法 Jpeg壓縮算法中的DCT快速算法







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論