 基于BP神經網絡的數據處理和分析方法實現定向導航系統檢測儀的設計
基于BP神經網絡的數據處理和分析方法實現定向導航系統檢測儀的設計
1、引言
車載定位定向導航系統是指裝載在輪式及履帶式車輛上,能自主地為車輛提供方位基準和位置信息的一種裝置。
本文所述的車載定位定向導航系統由尋北儀、方位保持儀、里程計、高程計等組成,其中,尋北儀和方位保持儀是極其重要的部分,它們的錯誤或失效直接影響系統的定向、定位精度,甚至會造成嚴重后果,因此對其進行準確的故障檢測和診斷顯得尤為重要。
目前,該系統采用傳統的故障檢測模式,通過硬件和軟件方式比較各模塊相關信號的實際值與參考值之差,若超出允許范圍,則認為出現異常或故障,其準確性和可控性較差。此外,該系統在性能檢測和故障診斷方面還存在以下兩點不足:一是受體積和重量等因素的制約,系統設計時沒有預留與外部檢測儀器(如示波器、萬用表等)的接口,因此,無法進行野外環境下的檢修;二是系統無法保存并顯示內部慣性器件各個時期工作狀態的數據,而這些數據對系統的使用、管理和維護具有極其重要的意義。
2、基本思想
獲取定位定向導航系統中慣性器件運行時的狀態數據是對其進行性能分析和故障診斷的前提條件,由于導航系統本身沒有預留檢測接口,常規的檢測儀器顯然無能為力。但我們注意到導航系統內部不但有專用的A/D模塊、V/F(電壓/頻率)轉換模塊和計算機模塊等負責采集慣性器件信號,而且還預留了一個RS-232串行通信端口,在此啟發下我們設計了一種檢測裝置--檢測儀,它能在保持導航系統硬件結構不變、性能指標不受影響的前提下,實現對導航系統的性能測試和故障診斷等功能。
為此,我們只需簡單地對導航系統軟件做一些增補,使之在原來單一的定位定向導航狀態工作模式基礎上增添了待檢測狀態的工作模式。檢測儀通過RS-232串行口以串行通信的方式與導航系統進行通信以獲取系統內部由A/D模塊和V/F模塊采集到的數據,采用基于BP神經網絡的數據處理和分析方法,使得對導航系統的性能檢測和故障診斷變得準確、便捷。
檢測儀的工作流程如圖1所示。當導航系統處于待檢測狀態時,檢測儀通過串行端口向導航系統發送各種檢測命令,導航系統隨即進入相應的檢測狀態并把檢測數據傳送給檢測儀,由檢測儀完成數據處理和系統性能分析,檢測結束后系統自動恢復到導航狀態。檢測過程中,導航計算機通過中斷控制方式接收命令、采集數據和發送數據。操作人員通過檢測儀發出各種檢測命令后,檢測過程由計算機自動完成,無需人工干預。

3、硬件配置
作為專用的檢測設備,要求檢測儀在車載定位定向導航系統需要檢測、維修的任何時間和地點都能夠方便地與導航系統對接并進行性能測試和故障診斷。因此檢測儀必須具有體積小、重量輕、功耗低、可靠性高、便于攜帶等特點,能在各種惡劣環境特別是野外環境下使用。根據以上要求,檢測儀選用了嵌入式計算機PC/104模塊。整個檢測儀的硬件配置如圖2所示。

PC/104計算機模塊是檢測儀的核心部分,由于檢測儀在檢測過程中不但要實時完成大量數據的收發任務,還要實時對獲得的各種數據進行復雜的處理、分析和存儲,因此要求其有盡可能高的性能。我們選用的PC/104計算機模塊具有一個內置浮點運算協處理器的高速嵌入式Pentium CPU、兩個16C550等同高速串行口,能夠快速可靠地進行RS-232串行通信,迅速準確地完成所賦予的各項功能。
電源模塊的作用是向PC/104計算機模塊和液晶顯示屏提供+5V和+12V電源。為便于和其它計算機交換數據,檢測儀還留有一個以太網口。
4、軟件設計
檢測儀的軟件基于Windows平臺的Visual Basic 6.0、Visual C++ 6.0、Matlab6.5和Access 2000設計完成。Visual Basic提供了功能強大且使用方便的串行通信控件“MSComm”,在開發Windows應用程序的編程語言中具有獨特的優勢,但在數據處理等方面功能較弱,Visual C++ 6.0、Matlab6.5可彌補其不足。在數據庫操作方面,檢測軟件使用了Visual Basic提供的數據接口ActiveX數據訪問對象(Data Access Object,DAO)來管理數據庫。DAO支持對Access數據庫的簡捷方便的訪問,是一種便于使用的應用程序接口。
4.1通信協議
檢測儀和導航系統之間的傳輸波特率為9600位/秒,傳輸幀格式為:1位起始位,8位數據位,1位停止位,1位偶校驗位,共11位數據。雙方進行通信時只需將預傳送數據的開頭加上一個起始判別字節即可。 檢測儀和導航系統之間的通信流程為:檢測儀發送檢測命令--導航計算機發回相關數據。
4.2功能模塊的設計
為了便于開發、調試、升級和維護,軟件采用了模塊化的設計思想,整個軟件主要由四個窗體和六個標準模塊組成。窗體包括展示窗體、功能選擇窗體、導航窗體和檢測窗體;標準模塊 是檢測儀完成各項任務的功能模塊,包括CRC校驗碼計算模塊、通信模塊、坐標變換模塊、數據拆分模塊、數據庫管理模塊和檢測數據處理模塊等。CRC校驗碼計算模塊用于生成串行通信校驗碼;通信模塊的作用是利用Visual Basic中串行通信控件“MSComm”的“input”和“output”屬性和“OnComm”事件完成數據的收發任務;坐標變換模塊負責把54坐標轉換為地心經緯度坐標;數據拆分模塊可把整型數據拆分為字節型數據,以便于通過串口發送;數據庫管理模塊根據需要把檢測的數據保存在數據庫中;檢測數據處理模塊為整個軟件的核心,根據檢測數據的類型給出相應的處理結果。
4.3檢測數據的處理
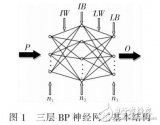
為準確判斷導航系統的工作狀態,我們設計了基于BP神經網絡的故障診斷方法,作用函數選取S型函數 。由于尋北儀中陀螺儀和加速度計正常工作時的信號均為周期信號,故這些信號可采用同一網絡進行性能檢測和故障診斷。檢測時取得一個周期的信號,首先經過低通數字濾波器以減少、消除檢測數據中干擾和噪聲的影響,然后進行歸一化處理。經過對試驗數據的多次仿真試驗,我們提取到其故障特征信號為峰值(MAX)、峭度(KUR)、標準差(STD)這三個量作為網絡的輸入。網絡采用離線訓練、在線使用的方式。
神經網絡的結構如圖3所示,其中隱含層神經元個數、各個神經元上的權值和閾值均由大量試驗樣本數據訓練得到。考慮到神經元的作用函數選為S型函數,故選取網絡的輸出訓練樣本為0.9(有故障)或0.1(無故障)。神經網絡學習算法采用自適應學習率梯度下降反向傳播算法,且參數每一步更新不僅考慮當前的梯度方向,而且還考慮前一時刻的梯度方向,從而降低了網絡性能對參數調整的敏感性,有效地抑制了訓練結果出現局部極小問題。對一個訓練好的BP網絡來說,根據網絡的輸出(out)即可判斷相應的慣性部件是否工作正常。測試結果表明,采用基于BP神經網絡的故障判別方法適合于車載定位定向導航系統慣性器件的故障診斷,準確率高。
5、結論
檢測儀的研制成功,解決了車載定位定向導航系統在野外環境下無法進行性能測試和故障診斷的難題。它不但能快速準確地獲取導航系統慣性器件的狀態信息數據并完成系統的性能分析和故障診斷,還能保證導航系統的正常工作且性能指標不受影響,其工作原理為已有裝備的性能檢測和故障診斷提供了一種新思路。
責任編輯:gt
-
萬用表
+關注
關注
88文章
2071瀏覽量
127614 -
示波器
+關注
關注
113文章
6240瀏覽量
184799 -
神經網絡
+關注
關注
42文章
4771瀏覽量
100719
發布評論請先 登錄
相關推薦
labview BP神經網絡的實現
基于BP神經網絡的手勢識別系統
如何設計BP神經網絡圖像壓縮算法?
怎么解決人工神經網絡并行數據處理的問題
基于BP神經網絡的PID控制

BP神經網絡風速預測方法
BP神經網絡概述






 工商網監
工商網監
評論