 不知道如何正確選擇工業相機?看這篇就夠了
不知道如何正確選擇工業相機?看這篇就夠了
如何選擇合適的工業相機
01你需要黑白相機還是彩色相機?
一張圖像是由一個個像素點陣列構成的,每個像素點都代表著一個數值,這個數值稱為像素值,它的含義為像素點的顏色強度。
彩色圖像 黑白圖像
a清晰度的區別
彩色相機芯片傳感器和黑白相機芯片傳感器在結構上沒有太大的區別,而黑白相機一般是在單色像素上加上濾色片,只允許一種顏色的光通過光感芯片,從而得到“黑白”的顏色。在彩色相機中,需要算法處理多通道的顏色分量,使得彩色圖像中像素邊緣精度丟失,所以彩色相機的的實際分辨率要比黑白相機的分辨率要低。
b靈敏度的區別
在相機芯片傳感器中每一個像素前面都有濾色片,這將導致像素接收的光量減少幾倍,另外,因為人眼只能看到可見光,為了使色彩信息接近人眼的習慣,一般需在感光芯片前再加一個紅外截至濾光片,又進一步減少像素接收的光量,這些問題將導致彩色感光芯片的靈敏度比同類黑白感光芯片的靈敏度低很多。
綜上所述
只有在需要檢測顏色信息的場合,如醫學電子目鏡,彩色印刷品檢測等場合,才需要使用彩色相機,其他的如文字識別,尺寸測量等,一般選用黑白相機。有一些檢測場合不需要檢測顏色信息,但因為檢測物體是彩色的,而且目標和背景的灰度級接近,這時,如果使用黑白相機,則對比度不強烈,而使用彩色相機,可以通過設置不同的 RGB 增益,起到增強對比度的效果。這時,會選擇彩色相機。
02你需要多大的圖像分辨率?
在檢測區域一定的前提下,相機的分辨率越高,檢測的精度也就越高,當然,檢測精度還和檢測算法有關系。如面積、形狀、尺寸、位置等的測量時,優先考慮面陣相機。如被測視野為細長的帶狀,類似滾筒上的檢測或者需要極大的視野或極高的精度時,考慮使用線陣相機。
a面陣相機案例說明
我們暫且假定算法的精度是一個像素,如果您的要求是這樣的:
需要檢測的某個方向的尺寸為 X。
希望檢測的精度為△X。
那么我們需要的分辨率就是: X / △X。
如,檢測一個長度寸約為10mm 的工件,精度為0.01mm,則圖像寬度需要 10/0.01=1000像素。
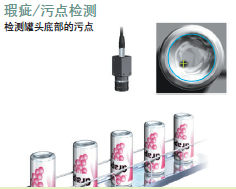
假設檢測一個物體的表面劃痕,要求拍攝的物體大小為10*8mm,要求的檢測精度是0.01mm。首先假設我們要拍攝的視野范圍在12*10mm,那么相機的最低分辨率應該選擇在:(12/0.01)*(10/0.01)=1200*1000,約為120萬像素的相機,也就是說一個像素對應一個檢測的缺陷的話,那么最低分辨率必須不少于120萬像素,但市面上常見的是130萬像素的相機,因此一般而言是選用130萬像素的相機。但實際問題是,如果一個像素對應一個缺陷的話,那么這樣的系統一定會極不穩定,因為隨便的一個干擾像素點都可能被誤認為缺陷,所以我們為了提高系統的精準度和穩定性,最好取缺陷的面積在3到4個像素以上,這樣我們選擇的相機也就在130萬乘3以上,即最低不能少于300萬像素,通常采用300萬像素的相機為最佳。
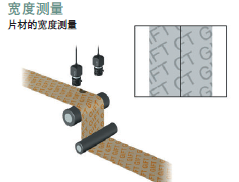
b線陣相機案例說明
1.計算分辯率:幅寬除以最小檢測精度得出每行需要的像素
2.選定相機:幅寬除以像素數得出實際檢測精度。
3.每秒運動速度長度除以精度得出每秒掃描行數。
例如如幅寬為1600毫米、精度1毫米、運動速22000mm/s
相機:1600/1=1600像素
最少2000像素,選定為2k相機
1600/2048=0.8實際精度
22000mm/0.8mm=27.5KHz
應選定相機為2048像素28kHz相機
03你需要多高的輸出幀率?
根據要檢測的速度,選擇相機的幀率一定要大于或等于檢測速度,等于的情況就是你處理圖像的時間一定要快,一定要在相機的曝光和傳輸的時間內完成。
a應用場合舉例說明
1.實時監控或觀察:輸出幀率 > 25fps
2.自動檢測:輸出幀率 > 每秒鐘檢測工件的個數
3.高速記錄和檢測場合需要 200 fps 甚至更高的輸出幀率
相機的幀頻一般和兩個因素有關,一是相機使用的感光芯片的輸出幀頻,而是相機能夠傳輸的幀頻,一般,相機選用的接口都是能將感光芯片產生的圖象完整的傳輸到主機的,但一些低成本的相機或做的不好的相機也有可能不能將感光芯片產生的圖象完整的傳輸到主機,就是通常所謂的丟幀。
b幀頻與行頻
幀頻是和分辨率相關的,因為“幀頻×分辨率=帶寬”。比如,分辨率為1280×1024 的相機,也就是 1.25M,每秒 28 幀,則帶寬就是 35M。包括感光芯片、傳輸接口等,都有一定的帶寬瓶頸,所以,要看一款相機的幀頻是否能滿足要求,必須看是在多大分辨率下幀頻多高。
對于線陣來說,因為只有一行,所以,一般不叫幀頻,叫行頻。即,每秒多少行。如果認為線陣一行就是一幀的話,這和幀頻其實是一個概念。線陣里還有一個像素時鐘的概念。就是每秒能有多少個像素輸出。這和行頻、幀頻有大概的對應關系。如,像素時鐘是 40M,則一秒有 40M 個像素輸出,一行有 2048 個像素,則行頻就是 40M/2048=20K。對于面陣來說,道理是一樣的,但面陣很少提及像素時鐘這個概念。
04你需要CCD相機還是CMOS相機?
按感光芯片的結構分,可以分為 CCD 和 CMOS 兩種。具體的又有很多種,這里我們列舉幾種比較常見的:
全幀 CCD
幀轉移 CCD
逐行掃描行間轉移 CCD
隔行掃描行間轉移 CCD
3T CMOS滾動快門或卷簾快門
4T CMOS串行全幀快門
5T CMOS并行全幀快門
線陣 CCD
以上結構中,在工業檢測領域應用最多的是逐行掃描行間轉移 CCD、隔行掃描行間轉移CCD、3T CMOS 滾動快門或卷簾快門和 4T CMOS 串行全幀快門。
a選型原則
拍攝的物體是否運動,如果拍攝的物體是運動的,則不能選用卷簾快門的CMOS 相機和隔行掃描行間轉移CCD,可以選用全幀快門CMOS 相機,或者是行間轉移 CCD。一般,只能拍靜止物體的相機價格相對低一些,而且,由于結構簡單,性能會比較不錯,所以,在只需要拍攝靜止物體的場合,選擇卷簾快門的 CMOS 相機會是不錯的選擇。
bCCD與CMOS區別
CCD 和 CMOS 是兩種不同的成像芯片結構,很難說哪種更好一些。常見的芯片中,由于 CMOS 的集成度比較高,功耗小,適合在手機、QQ 攝像頭中使用,所以,CMOS 目前的發展方向是像素尺寸比較小、低成本,高性價比。這也使大家有一個感覺,就是 CMOS的價格和性能都比較低,其實這是不準確的,CCD 也有低端和高端的,CMOS 也是一樣,所以,很難說 CMOS 就是比 CCD 差。這只是兩種不同的工藝。
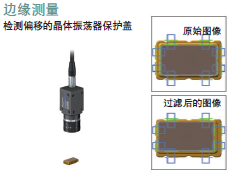
05你需要如何設置相機最短的曝光時間?
如果您需要抓拍運動物體,是不是選用適合抓拍運動物體的相機,如轉移型 CCD,或全幀快門 CMOS 相機就可以了呢?答案是否定的,您還需要設置合適的曝光時間,因為相機在抓拍運動的物體時會由于積分效應不可避免的會產生不同程度運動模糊。
a應用案例說明
要想拍到清晰的高速運動物體,準則就是,在曝光時間△T內,物體成的像在感光面上移動的距離不超過一個像素。例如:對 10mm 的物體,要求分辨精度到 10um,那么需要 1000像素的分辨率,即每一個像素對應物體的物空間長度是 100um,依據準則,曝光時間△T 內物體運動的距離應該不超過 100um,假設物體運動的物體為 V=5m/s,那么有:
V×Texp < 100um;?
Texp < 20us ;?
一個簡單的計算曝光時間的公式是:
Texp < 視野寬度/(圖像寬度×物體該方向移動速度)?
或 Texp < 視野高度/(圖像高度×物體該方向移動速度)
不過,曝光時間太短,如果相機的靈敏度不是很高,圖象就會太暗。不過在工業檢測場但是,有些場合,比如,交通上的高速道路抓拍,因為無法加光源,而車的運動速度又比較快,所以,這時就需要對相機的靈敏度提出很高的要求了。
編輯:jq
-
CMOS
+關注
關注
58文章
5710瀏覽量
235424 -
CCD
+關注
關注
32文章
880瀏覽量
142226 -
工業相機
+關注
關注
5文章
322瀏覽量
23623 -
感光芯片
+關注
關注
0文章
10瀏覽量
10160
原文標題:如何正確選擇工業相機?
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
工業相機的幀率是不是越高越好

關于陶瓷電路板你不知道的事
又一電工不知道,施耐德變頻器怎么復位,如果不告訴你,你知道怎么復位嗎?

工業相機該選擇哪種圖像采集卡?

Dragonfly S 5MP工業相機 機器視覺應用的新選擇






 工商網監
工商網監
評論