") 基于TMS320DM6446ZWT評(píng)估板和Linux實(shí)現(xiàn)車(chē)道偏離預(yù)警系統(tǒng)的設(shè)計(jì)
基于TMS320DM6446ZWT評(píng)估板和Linux實(shí)現(xiàn)車(chē)道偏離預(yù)警系統(tǒng)的設(shè)計(jì)
研究表明,大約15%的道路交通事故是由車(chē)輛駛離公路造成的,車(chē)道偏離預(yù)警系統(tǒng)能夠有效減少道路交通事故的發(fā)生。目前車(chē)道偏離預(yù)警系統(tǒng)采用的方法大致分為3種:1)基于車(chē)輛將到達(dá)車(chē)道邊界時(shí)間(Time to Lane Crossing,TLC)的預(yù)警算法;2)基于預(yù)測(cè)軌跡曲線偏離量不同的預(yù)警算法;3)基于平面圖像道路標(biāo)線夾角的預(yù)警算法。這幾種算法能夠?qū)崿F(xiàn)車(chē)道預(yù)警,但車(chē)輛出現(xiàn)偏離一般是由于駕駛員注意力分散或處于疲憊狀態(tài)時(shí)對(duì)車(chē)輛的控制疏忽所致,上述所做的各種假設(shè)與實(shí)際行駛過(guò)程均有偏差,如沒(méi)有考慮車(chē)輛的橫向偏轉(zhuǎn)角及駕駛員轉(zhuǎn)動(dòng)方向盤(pán)轉(zhuǎn)角在某個(gè)行駛過(guò)程中對(duì)車(chē)道偏離的影響。鑒于此,提出基于車(chē)輛橫向距離與橫向分速度進(jìn)行車(chē)輛偏離預(yù)警的方法。作為車(chē)道偏離預(yù)警系統(tǒng)的處理平臺(tái),PC機(jī)的體積、成本及功能的冗余性是其應(yīng)用在車(chē)載系統(tǒng)中難以克服的瓶頸,采用嵌入式方法對(duì)車(chē)道偏離預(yù)警系統(tǒng)的設(shè)計(jì),充分利用了嵌入式系統(tǒng)處理的實(shí)時(shí)性與體積小巧等特點(diǎn)。
1 道路圖像的處理
使用Sobel算子邊緣檢測(cè)和最大類(lèi)間方差圖像分割法將道路灰度圖像轉(zhuǎn)化為二值圖像,作為下一步處理的基礎(chǔ)。直線的矢量基元表示方法是按照某種準(zhǔn)則將矢量基元(ELS)合并連接來(lái)表示直線。如行基元、列基元和45°基元。行基元是道路圖像中同一行上的連續(xù)邊緣點(diǎn)的集合;列基元是道路圖像中同一列上的連續(xù)邊緣點(diǎn)的集合;45°基元是道路圖像中在傾角為45°。或135°的掃描線上連續(xù)邊緣點(diǎn)的集合。其優(yōu)點(diǎn)是計(jì)算耗費(fèi)的時(shí)間與變量存儲(chǔ)需要的空間較少。
Hough變換是利用投票機(jī)制參照?qǐng)D像全局特性對(duì)目標(biāo)直線輪廓進(jìn)行直接檢測(cè)。其優(yōu)點(diǎn)是對(duì)直線斷裂、局部遮擋等缺陷不敏感,對(duì)隨機(jī)噪聲具有魯棒性,特別適用于直線道路的識(shí)別。利用直線的矢量基元減少Hough變換中參數(shù)的量化范圍,能夠節(jié)省Hough變換的時(shí)間和空間消耗,同時(shí)彌補(bǔ)矢量基元表示直線的局部性和噪聲敏感性等不足,較好識(shí)別道路標(biāo)識(shí)線。
2 行駛車(chē)輛位置的確定
2.1 道路關(guān)鍵信息的重建
圖像傳感器固定在車(chē)輛前端頂部,攝像頭距地面高度為h。建立空間坐標(biāo)系如下:世界坐標(biāo)系XYZ與攝像機(jī)坐標(biāo)系xyz。動(dòng)態(tài)的世界坐標(biāo)系隨車(chē)輛一起運(yùn)動(dòng),以攝像機(jī)鏡頭中心在地面的垂直投影點(diǎn)為原點(diǎn),地面的垂直線向上為Z軸正向,車(chē)身縱軸線方向?yàn)閄軸,正向?yàn)槠?chē)前進(jìn)的反方向;攝像機(jī)坐標(biāo)系統(tǒng)以光軸為z軸,鏡頭中心為坐標(biāo)原點(diǎn),攝像機(jī)坐標(biāo)xy平面與像平面平行;表征圖像內(nèi)部各點(diǎn)位置的像平面坐標(biāo)系統(tǒng)的u軸、v軸與x軸、y軸平行,原點(diǎn)位于圖像中心既攝像機(jī)光軸與圖像的交點(diǎn)。所有坐標(biāo)系滿足右手規(guī)則。
平面圖像上某點(diǎn)(u,v)經(jīng)過(guò)逆透視投影變換后獲取其在空間點(diǎn)(X,Y,Z)的位置信息,由此重建道路關(guān)鍵信息
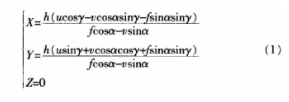
式中,f為攝像機(jī)的有效焦距,γ表示攝像機(jī)x坐標(biāo)軸相對(duì)于X軸的夾角稱(chēng)為掃視角,α表示攝像機(jī)光軸(z軸)相對(duì)于垂直方向(Z軸)的夾角稱(chēng)為傾斜角。
2.2 車(chē)輛在當(dāng)前道路中橫向距離及橫向偏轉(zhuǎn)角的確定
利用改進(jìn)的Hough變換識(shí)別道路標(biāo)識(shí)線后,通過(guò)圖像平面的道路標(biāo)線直線方程和式(1),得到左、右道路標(biāo)識(shí)線在世界坐標(biāo)系內(nèi)的直線方程
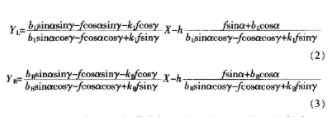
式中,kL與kR為左、右道路標(biāo)識(shí)線在平面圖像上的斜率,bL和bR為左、右道路標(biāo)識(shí)線在v軸上的截距。結(jié)合圖像傳感器的安裝高度以及鏡頭焦距等參數(shù),可以獲得車(chē)輛距道路標(biāo)識(shí)線的橫向距離及橫向偏轉(zhuǎn)角,如圖l所示。
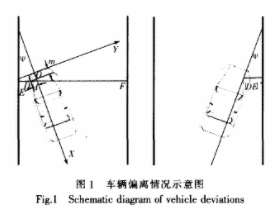
圖l中,點(diǎn)0代表攝像機(jī)鏡頭中心在路面的垂直投影點(diǎn),點(diǎn)D代表車(chē)輛的左前輪,點(diǎn)D與CCD攝像機(jī)鏡頭中心在汽車(chē)縱向平面及橫向平面的距離分別為m,d,汽車(chē)縱向平面與道路標(biāo)識(shí)線的夾角ψ稱(chēng)為橫向偏轉(zhuǎn)角。
車(chē)輛在車(chē)道中的位置采用左前車(chē)輪距左標(biāo)線的橫向距離|DE|或左前車(chē)輪距右標(biāo)線的橫向距離|DF|表示。或者采用右前車(chē)輪距右標(biāo)線的橫向距離|DE|’或右前車(chē)輪距右標(biāo)線的橫向距離|DF|’表示,則根據(jù)三角幾何關(guān)系推導(dǎo)出的計(jì)算公式
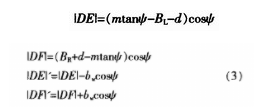
式中,bw為車(chē)輛輪距,BL、BR為左、右道路標(biāo)線在Y軸上的截距,其值決定于道路標(biāo)識(shí)線的空間方程。橫向偏轉(zhuǎn)角ψ表示汽車(chē)行駛過(guò)程相對(duì)于道路標(biāo)識(shí)線的偏離方向,通過(guò)道路標(biāo)識(shí)線空間方程計(jì)算得出,滿足tanψ=-KL,KL為左道路標(biāo)線的斜率。
3 車(chē)道偏離預(yù)警
3.1 預(yù)警算法的建立
通過(guò)車(chē)輛距道路標(biāo)識(shí)線的橫向距離和橫向速度估算車(chē)輛到達(dá)道路標(biāo)線的時(shí)間,當(dāng)時(shí)間小于設(shè)定閾值時(shí)啟動(dòng)車(chē)道偏離預(yù)警。車(chē)輛的橫向速度可以通過(guò)橫向距離的變化得到,由于計(jì)算車(chē)輛距道路標(biāo)線的橫向距離的采樣周期較短(O.1 s),在該段時(shí)間內(nèi)認(rèn)為車(chē)輛做橫向勻速運(yùn)動(dòng)。車(chē)輛的橫向分速度也可以由車(chē)速傳感器獲得的速度信號(hào)和橫向偏轉(zhuǎn)角確定,為減少測(cè)量誤差的影響采用二者的平均值作為橫向速度的取值。
車(chē)輛在車(chē)道中的橫向位置用前車(chē)輪距道路標(biāo)線的距離表示,車(chē)輛向左偏轉(zhuǎn)時(shí),用左前車(chē)輪距左道路標(biāo)線的距離|DE|表示;車(chē)輛向右偏轉(zhuǎn)時(shí),用右前車(chē)輪距右道路標(biāo)線的距離|DE|’表示,如圖1所示。車(chē)輛在車(chē)道中的行駛方向用車(chē)輛縱向平面相對(duì)于道路標(biāo)識(shí)線的偏轉(zhuǎn)角ψ表示,車(chē)輛偏向左方時(shí),ψ為正值;車(chē)輛偏向右方時(shí),ψ為負(fù)值。
車(chē)道偏離預(yù)警主要作用于駕駛員由于注意力分散或疏忽造成的無(wú)意偏離,當(dāng)車(chē)輛的轉(zhuǎn)向燈信號(hào)開(kāi)啟時(shí),說(shuō)明駕駛員有意圖轉(zhuǎn)向,此時(shí)屏蔽系統(tǒng)的偏離車(chē)道預(yù)警功能。當(dāng)本車(chē)距道路標(biāo)識(shí)線的橫向距離與橫向車(chē)速的比值小于規(guī)定的時(shí)間時(shí),認(rèn)為車(chē)輛即將偏離車(chē)道行駛,需要報(bào)警。系統(tǒng)的預(yù)警算法如下:車(chē)輛位置參數(shù)滿足式(4)并且ψ>0時(shí),為車(chē)道偏離預(yù)警時(shí)刻,方向偏向左。
式中,v、vl2表示由速度傳感器獲得的瞬時(shí)速度及其橫向分量,vl為瞬時(shí)橫向速度,vl1為用橫向距離計(jì)算的橫向速度。|DE|i,|DE|‘in分別代表第i幀的車(chē)輛橫向位置,|DE|i-1,|DE|’i-1h分別代表第i-1幀的車(chē)輛橫向位置,bw代表車(chē)輛輪距,△t表示采樣時(shí)間間隔,Tc是車(chē)輛偏離車(chē)道預(yù)警的時(shí)間閾值,這里取0.9 s。
3.2 系統(tǒng)軟件設(shè)計(jì)
車(chē)輛偏離預(yù)警系統(tǒng)的實(shí)時(shí)性要求處理器有較快的運(yùn)行速度和超強(qiáng)的實(shí)時(shí)調(diào)度能力,研究中選用基于DSP和ARM9雙核的TMS320DM6446ZWT片上系統(tǒng)(SoC)的評(píng)估板作為系統(tǒng)的硬件平臺(tái);選用Linux系統(tǒng)作為嵌入式操作系統(tǒng)。
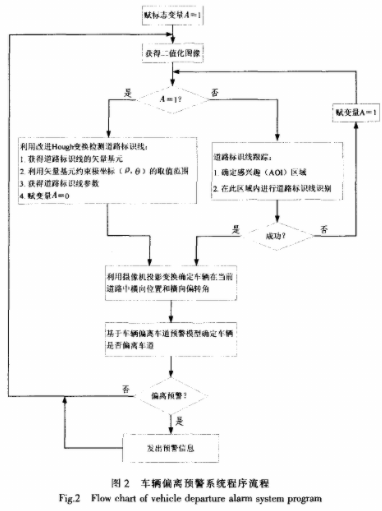
系統(tǒng)首先接收?qǐng)D像傳感器傳送過(guò)來(lái)的圖像,將彩色圖像轉(zhuǎn)化為待處理的灰度圖像,利用中值濾波、Sobel算子邊緣檢測(cè)、自適應(yīng)閾值分割等圖象處理的方法,消除噪聲并平滑圖像,經(jīng)過(guò)邊緣檢測(cè)和圖像分割獲得二值化圖像。在二值化圖像和灰度圖像基礎(chǔ)上根據(jù)攝像機(jī)標(biāo)定參數(shù),通過(guò)模式識(shí)別對(duì)道路及道路標(biāo)識(shí)線進(jìn)行辨認(rèn),確定道路標(biāo)線在整幅圖像中的直線方程及本車(chē)在道路中的位置。依據(jù)車(chē)道偏離預(yù)警模型檢查車(chē)輛是否在車(chē)道中正常行駛,是否偏離車(chē)道,并根據(jù)判斷結(jié)果發(fā)出預(yù)警信息。軟件流程圖如圖2所示。
3.3 預(yù)警實(shí)驗(yàn)
實(shí)驗(yàn)車(chē)輛選用五菱之光6400C3加長(zhǎng)版微型車(chē),在高速公路及城市道路等結(jié)構(gòu)化道路上進(jìn)行道路標(biāo)識(shí)線識(shí)別及車(chē)輛偏離預(yù)警試驗(yàn)。系統(tǒng)能夠可靠地識(shí)別道路標(biāo)識(shí)線,滿足后續(xù)處理的需要,當(dāng)車(chē)輛偏離車(chē)道時(shí),該系統(tǒng)能夠準(zhǔn)確及時(shí)預(yù)警。例如系統(tǒng)某次報(bào)警發(fā)生時(shí)刻,車(chē)輛距道路標(biāo)線距離為406 mm,橫向偏轉(zhuǎn)角為14.0°±2°,車(chē)速為85 km/h。
4 結(jié)束語(yǔ)
該設(shè)計(jì)是以嵌入式系統(tǒng)為平臺(tái),以圖像傳感器獲取的道路信息為基礎(chǔ),提出基于車(chē)輛橫向位置與橫向分速度的車(chē)輛偏離車(chē)道預(yù)警模型,并進(jìn)行了實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)表明,該方法能夠準(zhǔn)確分析車(chē)輛在車(chē)道中的位置信息,正確判斷車(chē)輛的行駛狀態(tài),當(dāng)車(chē)輛偏離車(chē)道時(shí)及時(shí)給予報(bào)警。
責(zé)任編輯:gt
-
處理器
+關(guān)注
關(guān)注
68文章
19286瀏覽量
229853 -
dsp
+關(guān)注
關(guān)注
553文章
7998瀏覽量
348942 -
Linux
+關(guān)注
關(guān)注
87文章
11304瀏覽量
209523
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
設(shè)計(jì)用于TMS320C203評(píng)估的TMS320C203 DSP開(kāi)發(fā)板

TMS320DM6446上的Motion JPEG演示
使用TMS320DM6446 DVSDK測(cè)量視頻質(zhì)量
從TMS320DM35x遷移到TMS320DM36x器件
從TMS320DM6446遷移到TMS320DM6467
TMS320DM642至TMS320DM6437遷移指南
使用XDC工具創(chuàng)建TMS320DM6446音頻編碼示例
從TMS320DM6467遷移到TMS320DM6467T
從TMS320DM365遷移到TMS320DM368
從TMS320DM6446 594MHz遷移到810MHz
從TMS320DM642遷移至TMS320DM648/DM6437
使用TPS650061為TMS320DM335和TMS320DM355供電
SM320DM6446片上數(shù)字媒體系統(tǒng)數(shù)據(jù)表
TMS320DM6446片上數(shù)字媒體系統(tǒng)數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論