 基于DSP芯片和BF-533EZ-KitLite評估板實現車道偏離報警系統的設計
基于DSP芯片和BF-533EZ-KitLite評估板實現車道偏離報警系統的設計
一、引言
在世界范圍內,公路交通事故導致驚人的人員傷亡和經濟損失。據統計,約有44%的汽車事故與車輛偏離正常車道行駛有關,其主要原因是駕駛員注意力不集中或者疲勞駕駛,造成車輛的無意識偏離。車道偏離報警系統(簡稱LDWS或RDWS)正是基于基本交通規則的車輛安全系統,其主要功能是輔助過度疲憊或者長時間單調駕駛的駕駛員保持車輛在車道內行駛。由于LDWS具有顯著提高車輛行駛主動安全性的潛力,得到了國內外研究人員越來越多的重視。因此該系統具有廣泛的市場潛力與應用價值。
二、系統總體設計
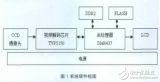
車道偏離報警系統的系統總體設計如圖1所示,主要包括軟件設計即人機界面設計和硬件設計兩大部分。人機界面為PC端上的圖形化控制臺,用于模擬汽車的制動信號和轉向信號以及車速信號等,通過串口將信號傳送給DSP,同時顯示由DSP送來的車輛偏離數據和實時道路場景。硬件部分由DSP構成,負責實時車道檢測與識別,車道偏離量的計算。
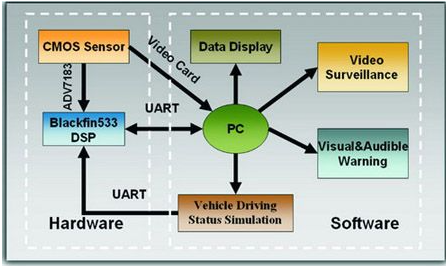
圖1系統設計
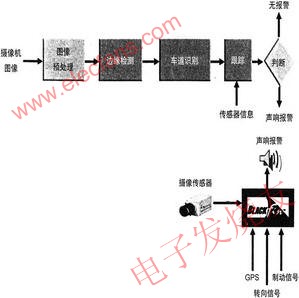
系統通過圖像傳感器獲取車道幾何結構,通過車輛運動參數傳感器獲取決策算法所必需的車輛運動參數如車速、車輛轉向狀態等,綜合分析判斷車輛偏離車道的程度。如果車輛偏離量超過設定閾值,控制臺界面上的報警燈將會閃亮,同時發出蜂鳴報警聲。
三、人機界面設計
在人機界面設計上采用VisualC++6.0開發環境和NI公司的Measurement Studio編程工具共同開發,用VC完成程序的主要功能,用Measurement Studio的精美控件完成程序的界面編程。在系統與DSP通信上我們采用微軟公司的MSSCOM控件進行編程,減小工作量,降低開發難度。軟件系統分為三個模塊:顯示模塊、控制模塊、通信模塊。顯示模塊負責將DSP發來的報警信號,車道偏移信號進行圖形化顯示,控制模塊主要向DSP發送控制命令,通信模塊負責PC與DSP間信號的交互。人機界面各模塊間的關系如圖2所示。
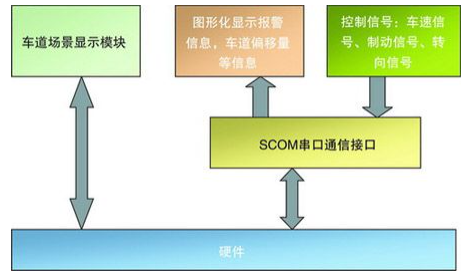
圖2人機界面設計
四、硬件設計
系統硬件主要是以DSP為核心的實時處理平臺,主要完成圖像采集、車道檢測與識別、車道偏移量計算等功能,并將計算結果傳送給控制臺界面作動態顯示。
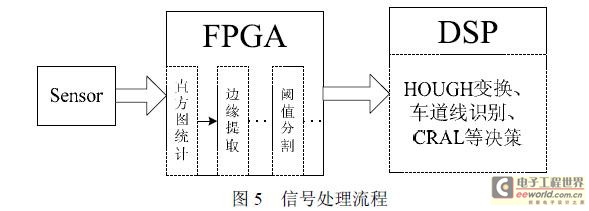
DSP硬件系統包括視頻A/D模塊、實時圖像處理模塊、視頻D/A模塊、UART通信模塊、外部儲存器模塊。視頻A/D模塊采用ADV7183視頻解碼芯片,圖像處理芯片采用ADI公司的Blackfin-533多媒體數字信號處理器,ADM3202RS-232通用異步收發器。DSP系統框圖如圖1左方虛線框所示。
在開發中我們采用ADI公司的BF-533EZ-KitLite評估板,該平臺具有良好的可操作性和豐富的外設接口,為我們降低了系統開發難度,節約了時間。
在DSP端,圖像經CMOS攝像頭轉換成視頻信號送入ADV7183視頻編碼器,我們從解碼視頻流中的亮度分量獲得灰度圖像序列,首先進行圖像預處理,由3×3的高斯模板對圖像進行濾波,濾除部分隨機噪聲,然后進行車道標志檢測。由于結構化道路上的車道標識線與路面背景具有較強的對比度,車道邊緣較明顯,因此利用邊緣檢測算法能夠較好地檢測出車道邊緣。目前較好的邊緣檢測算法是Canny法,檢測的車道邊緣準確,線條較細,但是計算量大。Sobel算法相對于Canny法的線條較粗,但計算量較小,便于實時系統應用。因此,系統采用了Sobel法,然后采用Ostu法對邊緣增強的圖像序列進行二值化,該算法能夠自動確定分割閾值,使前景與背景兩類的方差最大。
經過分割后的二值圖像中包含了車道標識線,但還含有很多雜散線條,因此要對車道線進行識別,將其從雜散線條中提取出來。基于對道路的先驗知識,三維場景中的直線投影到二維平面上亦為直線,而實際道路中出現直道的概率遠大于彎道出現的概率,所以我們采用了簡化的道路模型,即直線車道模型。檢測直線的常用方法是Hough變換,由于標準Hough變換計算量太大,不能在DSP上實現,我們將圖像按重要性分為三個區域如圖3所示。
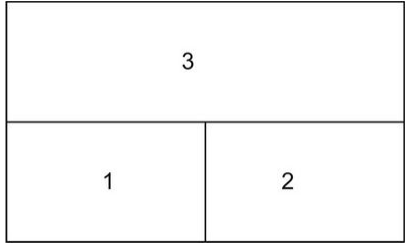
圖3圖像區域示意圖
我們只在區域1和區域2做Hough變換,區域3不做處理,并增大了Hough變換的角度搜索步長,進一步減小計算量。區域1中檢測到斜率在(0,90)度、長度為30像素以上的直線段判定為左車道,在區域2中檢測到的斜率在(0,-90)度、長度為30像素以上的直線段為右車道。
當車道檢測出來以后,需要根據車道信息判斷車輛在車道中的位置,因此車道偏離決策算法也是車道偏離報警系統的關鍵,它主要是確定一個合適的預警量向駕駛員提供報警,能夠保證及時和準確報警,同時不會對駕駛員造成過多的干擾。目前常用的偏離決策算法都需要對相機進行標定(如TLC方法),增加了系統的復雜性,并給安裝帶來不便。本系統采用的車道夾角法,不需要對相機進行標定,安裝時 保持相機與車輛平行即可。如果車輛的左右車道夾角之和超過某一設定閾值,則認為車輛偏離正常車道,系統根據當前行使狀況綜合判斷駕駛員是否無意識偏離了行車道,并發出報警,提醒駕駛員糾正行車路線。圖4為車道偏離算法流程圖。
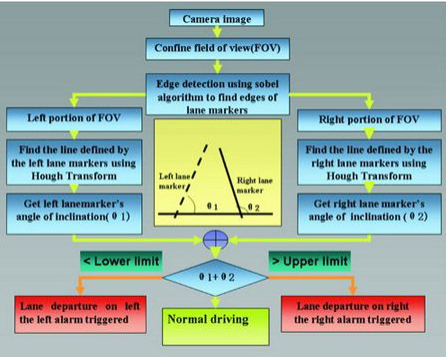
圖4車道偏離算法流程圖
五、仿真結果與分析
圖5(a)為車輛位于車道中心附近行駛,(b)為車輛位于車道偏左行駛,(c)為車輛位于車道偏右行駛,(d)(e)(f)分別為(c)(b)(c)所示行使狀態下的控制臺顯示界面。如(d)所示,當車輛位于車道中心附近行使時,車道偏移量的值在0值附近擺動,表示車輛并未發生偏離,此時偏離報警燈也未點亮。如(e)所示,當車輛無意識行駛到車道左邊時,車道偏移量在-20到-30之間擺動,此時左偏報警燈閃亮,同時發出較低頻率的蜂鳴報警聲,表示車輛向左偏離。當車輛偏向右邊車道時如(c)所示;偏移量的值在20到30之間變化,右偏報警燈閃亮,并發出較高頻率的蜂鳴報警聲,如圖(f)所示。
車輛在虛線道路上行駛的情況如圖6所示,(b)表示車道偏離量在0值附近變化,說明車輛沒有發生偏離,(c)為車輛左偏時的偏離量的值,其值在-20附近變化 ,(d)為車輛右偏時的偏離量值,其值在-20到-30之間變化。
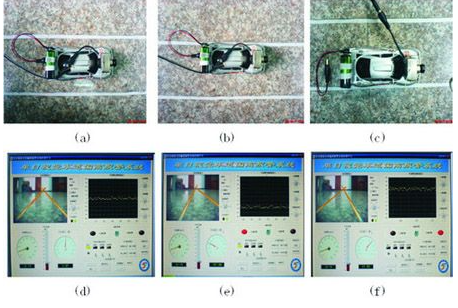
圖5車輛在實線車道上行駛的實驗結果
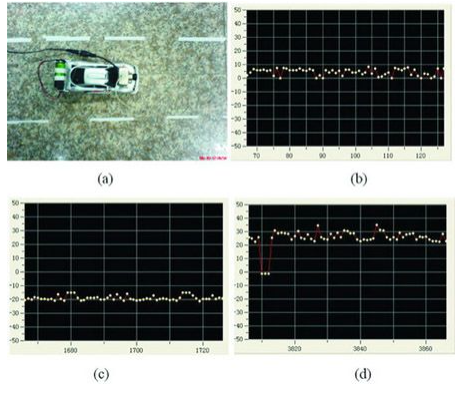
圖6
從以上模型車輛的實驗結果可以看出,系統能夠較好地適應不同線型的車道線,并能在模型車輛偏離時做出正確的判斷,發出不同的報警提示,達到了設計要求。
責任編輯:gt
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753080 -
dsp
+關注
關注
553文章
7987瀏覽量
348756 -
報警系統
+關注
關注
5文章
647瀏覽量
75186
發布評論請先 登錄
相關推薦
用于ADSP-BF533和ADSP-BF561 Blackfin處理器的EZ-KIT Lite評估系統的Blackfin EZ擴展子板
基于Blackfin數字信號處理器的ADZS-BF533-EZLITE,ADSP-BF533 EZ-KIT Lite評估系統
車道偏離報警(ldw)系統技術
用于ADSP-BF533 EZ-KIT Lite和ADSP-BF561 EZ-KIT Lite的Blackfin EZ-Extender產品亮點

BF533-EZ ADSP-BF533 EZ-Kit Lite評估硬件為評估ADSP-BF531、ADSP-BF532和ADSP-BF533 Blackfin處理器系列提供低成本硬件解決方案。





 工商網監
工商網監
評論