 基于MCS-96單片機和數據融合技術實現機器人系統的應用方案
基于MCS-96單片機和數據融合技術實現機器人系統的應用方案
本系統所設計的機器人的主要任務是在未知環境下依靠多傳感器信息,運用D-S數據融合算法,提供與環境有關的關于系統狀態的足夠的與可靠的信息,使機器人能夠自主規劃路徑、躲避障礙物,最終向目標靠近。
本控制系統采用主從式控制系統。系統選用了激光傳感器、超聲傳感器、紅外傳感器、光敏傳感器、光電編碼器等多種類型的傳感器,它們之間相互組合,實現機器人小車的測距、避障、尋找目標等功能。
1 多傳感器數據融合技術與D-S方法
多傳感器數據融合技術結合了控制理論、信號處理、人工智能、概率和統計的發展,協同運用多傳感器的傳感數據,提取所探測環境的近可能多的有用信息,消除信息的不確定性,提高傳感器的可靠性。
多傳感器數據融合技術有許多優點:增加了測量的維數和置信度;改進了探測性能;擴展了空間和時間的覆蓋范圍;改進了系統的可靠性和可維護性;系統容錯性好,運行魯棒性強;系統內資源共享,可提高資源的利用率。
D-S證據理論是Dempster于1967年提出,后由Shafer加以擴充和發展而形成的一種信息融合方法。D-S證據理論可處理由不知道所引起的不確定性。
D-S方法的推理結構分為三級。
第一級是合成。它把來自幾個獨立傳感器的報告合成為一個總的輸入。
第二級是推斷,由它獲取傳感器報告并進行推斷,將傳感器報告擴展成目標報告。
第三級是更新,因各種傳感器一般都有隨機誤差,所以在進行推斷和傳感器合成之前要先更新傳感器級的信息。
2 傳感器的選用
本系統所設計的智能機器人具有測距、自動避障、自動尋找以一發光源為目標的物體的功能。每一個功能均選用幾種不同類型的傳感器進行測量,再應用D-S融合算法把這些數據進行融合,最后得到我們需要的更加全面、準確、可靠的反映環境特征的信息,指導機器人的運行。
本系統具體傳感器的選用如下:
1) 測距傳感器
測距傳感器選用了三種類型的傳感器:激光傳感器、超聲傳感器、紅外傳感器。
2) 避障傳感器
避障傳感器選用了三種類型的傳感器:激光傳感器、超聲傳感器、紅外傳感器。
3) 尋找目標傳感器
尋找目標傳感器選用了兩種類型的傳感器:紅外傳感器和光敏傳感器。
4) 光電編碼器
激光傳感器選用的是DLS-A激光測距傳感器。該設備擁有許多卓越的性能:測程0.2-200m,串行接口(RS232或RS422),單根RS422線可連接多達10個模塊,范圍寬廣的供電電壓(9-30V),可編程模擬輸出,兩個可編程數字輸出端,數字輸出錯誤信號,4個發光二極管用于顯示狀態信號,D型接口和螺旋接線端便于連接,望遠鏡適配器使得安裝非常簡便,堅固的鋁金屬外殼,IP65(防止灰塵和水汽浸入),完整的軟件配置,二等激光。
3 硬件結構
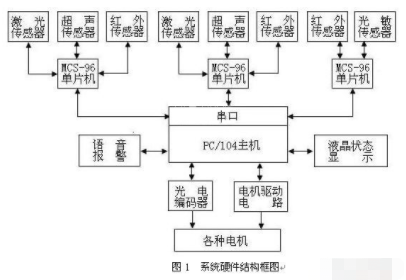
為減輕主控器的負擔,系統采用主從式控制系統。分別用三個MCS-96單片機處理來自測距傳感器、超聲傳感器、尋找目標傳感器的數據,并進行數據融合;最后把處理好的數據通過RS-232串口上傳至上位機PC/104 386SX系統。由PC/104主機做出下一步的處理。系統硬件結構框圖如圖1所示。
PC/104主機主要用來完成對三個下位機所處理的數據進行采集,然后根據情況調整小車前向電機、轉向電機的運動,并將光電編碼器測量到的小車速度等信息顯示在液晶屏幕上,如果發生碰撞現象,還可用語音進行報警等操作。上位機選用PC/104主機是因為:第一,386系統處理速度比單片機要迅速;第二,為了便于以后系統的擴展。
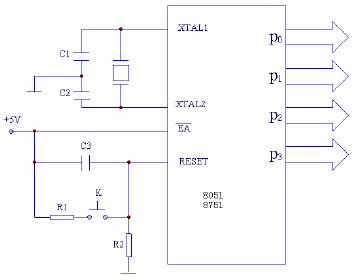
為避免其它不可預知的故障出現,使機器不能正常運行,系統還設置了一個硬復位按鈕。
4 軟件設計
各個下位機的軟件設計流程是先檢測各類傳感器的數據,再用D-S法進行數據融合,最后等待主機的指令,把融合后的數據上傳至主機。
主機的軟件設計流程是通過串口循環接收來自三個不同下位機的數據(三個下位機的通訊握手地址不同)。根據尋找目標傳感器所測到的目標位置,進行路徑規劃,調整前向電機與轉向電機的運動方向。再根據測距傳感器所測到的目標距離,調整電機的運動速度。當避障傳感器發現前方有障礙物或小車與障礙物發生碰撞時,要立即停止運行,重新規劃路徑。讀取光電編碼器的值,把小車速度顯示在液晶顯示器上。如果出現小車與障礙物發生碰撞或找不到目標光源物體時要通過語音芯片進行報警。
主機和下位機程序內部均設有看門狗程序,避免程序跑飛。
5 總結
本系統設計了一個基于多傳感器數據融合技術的智能機器人。該設計運用了多傳感器數據融合技術,采用了主從式控制系統,使機器人能夠更準確的尋找目標與避障,有很好的魯棒性。
本文作者創新點:(1)提出一種基于多傳感器數據融合技術的智能機器人系統設計,軟硬件工作可靠。(2)用到D-S融合算法,提供與環境有關的關于系統狀態的足夠的與可靠的信息,使機器人能夠自主規劃路徑、躲避障礙物,最終向目標靠近。(3)系統采用了主從式控制系統,有很好的擴展性。(4)良好的抗干擾能力。
責任編輯:gt
-
傳感器
+關注
關注
2557文章
51729瀏覽量
758816 -
單片機
+關注
關注
6050文章
44687瀏覽量
641186 -
機器人
+關注
關注
212文章
28910瀏覽量
209657
發布評論請先 登錄
相關推薦
MCS-96系列單片機中斷優先級的控制方法
MCS-51系列和80C51系列單片機的區別
mcs-96系列單片機
智能清潔機器人
【深聯華杯】基于SLH89F5162單片機的智能清潔機器人
基于MSP430F149單片機設計的室外移動機器人組合導航定位系統
如何實現移動機器人的設計?
MCS-96單片機的應用系統設計基礎






 工商網監
工商網監
評論