 基于MC68HC08單片機和L293D集成電路實現機器人追跑系統的設計
基于MC68HC08單片機和L293D集成電路實現機器人追跑系統的設計
作者:魏俊博;栗桂鳳;徐志強
機器人作為人類20世紀最偉大的發明之一,在短短的40年內發生了日新月異的變化。隨著計算機技術、通信技術、傳感器技術等的發展,機器人之間的互動成為機器人技術的一大熱點。
本文設計了一種基于摩托羅拉MC68HC08系列單片機的機器人追跑控制系統,用于研究機器人之間的簡單互動。
移動機器人行為描述
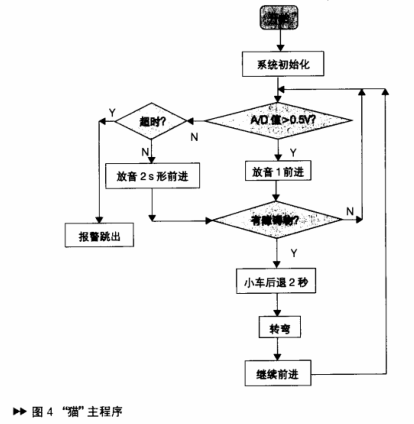
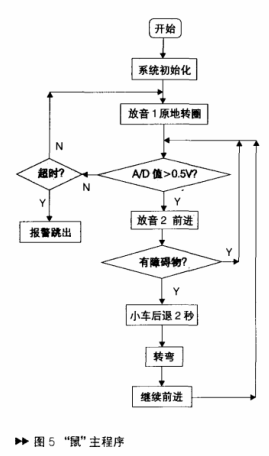
在此系統中,我們將兩個移動機器人一個命名為“貓”,一個命名為“鼠”。當兩個機器人都無法接收到對方發出的信號時,機器人“貓”以S形前進,機器人“鼠”在原地進行180度擺動;當機器人“貓”檢測到機器人“鼠”發出的信號時,以直線追向機器人“鼠”的方向,而機器人“鼠” 同時接收到“貓”的信號,以直線向前移動,以躲避“貓”的追趕,直至逃出“貓”的接收范圍,重復無法接收到信號時的行為;如果“貓”在一段時間內都無法發現“鼠”的存在,就發出聲音報警。在整個過程中,由于環境未知,“貓”和“鼠”都有避障控制,而且可以根據不同的行為狀態,播放不同的音樂。
系統硬件設計
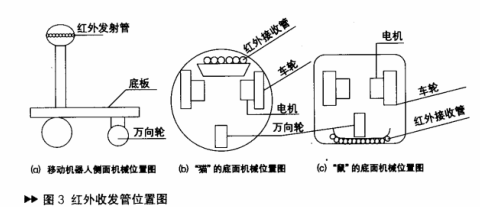
“貓”、“鼠”兩個機器人的電路設計基本相同,都是由單片機系統、紅外收發模塊、電機控制模塊和語音模塊構成,其不同是紅外線發射管和接收管陣列的排列有所不同。單片機選用Motorola公司的8位微處理器M68HC908GP32(42管腳封裝);紅外收發模塊使用PT2262和放大器組成的簡單紅外線收發電路;電機控制模塊選用L293D進行電機驅動;語音模塊選用ISD25120控制放音。另外,系統地電源模塊使用12V干電池。

單片機系統
MC68HC08系列中的單片機是Motorola公司1999年推出的8位微控制器,具有速度快、功能強、功耗小及價格等特點。
我們在設計中選用的M C68H C908GP32單片機是MC68HC08系列微控制器的第一 批產品,其特點是片內資源豐富、高性能,低價位,且具有多種保護功能,適用于各種數據處理平臺搭建。在這里我們主要用它完成紅外信息融合、電機控制及語音播放控制。
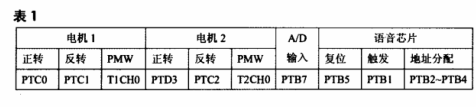
設計中,兩個機器人上單片機的主要端口設置相同,如表1所示。另外避碰的三個觸點開關控制為PTB0、PTB6、PTA7。
紅外收發模塊
紅外發射模塊使用PT2262和紅外發射管陣列構成的紅外發射電路。紅外接收電路使用紅外接收管陣列和放大器組成。接收到的信號輸入至單片機的PTB7端口,經過A/D轉換后,送入處理器,以控制機器人的行為轉換。
電機控制模塊
電機驅動電路采用基于雙極性H-橋型脈寬調整方式PWM的集成電路L293D。L293D具有很多優點,如電流連續;電機可四角限運行;電機停止時有微振電流,起到“動力潤滑”作用,消除正反向時的靜摩擦死區;低速平穩性好等。L293D通過內部邏輯生成使能信號。H-橋電路的輸入量可以用來設置馬達轉動方向,使能信號可以用于脈寬調整(PWM)。另外,L293D將2個H-橋電路集成到1片芯片上,這就意味著用1片芯片可以同時控制2個電機。
機器人有三個車輪,兩個使用電機控制,另一個為萬向輪,因此使用1片L293D進行控制即可。將兩路PMW控制信號分別接至兩路電機控制的使能引腳EN12和EN34,通過調整PWM的占空比可以調整電機的轉速。將電機正反轉控制線分別接入IN1、IN2、IN3和IN4,,通過寫入不同的值控制兩個電機的正轉和反轉。
語音模塊
為了區別移動機器人的各個不同狀態,我們使其在做出不同動作的同時,可以播放不同的聲音。為了達到這個目的,語音控制部分選用語音芯片ISD25120。ISD25120的錄放時間為120秒,錄音最多能分600段。只要在分段錄/放音操作前(不少于300納秒),給地址A0"A9賦值,錄音及放音功能均從設定的起始地址開始。
在設計時,除了用單片機控制ISD25120的復位和觸發端外,使用四位I/O控制芯片的放音起始地址。在初始化時,分別將兩個機器人的不同信息寫入語音芯片的A0"A3,選擇放音;在動作過程中,在行為發生改變時,寫入新的信息,改變放音選擇,播放不同音樂。
系統軟件設計
系統軟件主要由主程序模塊、中斷服務程序模塊、語音控制模塊和運動規劃模塊等部分組成。整個系統的軟件部分采用匯編語言編寫。
結論
經過實驗證明,兩個機器人在不受外界干擾的情況下,能夠正確地完成追跑動作。此設計為研究機器人之間簡單互動提供了試驗平臺。在以后的研究中,通過改變傳感器位置及內部程序,可以改變二者間的互動關系,例如協作等,進行更深的研究。
責任編輯:gt
-
集成電路
+關注
關注
5387文章
11530瀏覽量
361632 -
單片機
+關注
關注
6035文章
44554瀏覽量
634641 -
機器人
+關注
關注
211文章
28380瀏覽量
206916
發布評論請先 登錄
相關推薦
68HC(9)08JL3單片機的特點及開發手段
基于MC68HC08系列單片機的機器人追跑控制系統設計
L293D的驅動與占空比問題
電機驅動芯片L298N和L293D的區別在哪
MC68HC908QY4,MC68HC908QT4,MC68
MC68HC(9)08JL3單片機中文資料,pdf data
M68HC08系列單片機原理與應用 (嵌入式系統初步)
MC68HC08系列單片機原理與應用
Motorola微控制器MC68HC08原理及其嵌入式應用

使用Arduino和L293d shield制作語音控制機器人






 工商網監
工商網監
評論