 基于F2407A和TMS320LF2407A芯片實現遠程控制移動機器人系統的設計
基于F2407A和TMS320LF2407A芯片實現遠程控制移動機器人系統的設計
作者:許松清,吳海彬,林宜,高洪張
引 言
機器人技術融合丁機械、電于、傳感器、計算機、人工智能等許多學科的理論與技術,是當今許多前沿領域技術的綜合體。移動型機器人主要用于對一些危險和未知的地域進行探索,例如是探索外星地表、進行引爆地雷等都需要使用到移動型機器人。半自主遠程控制移動機器人由于具有較強的活動能力、良好的可控性等特點,在工農業、國防等各個領域具有廣泛的應用前景。在半自主遠程控制移動機器人的控制操作中,需要人的參與。因此需要有一個人機交互通道,把人的指令傳遞給機器人執行,同時機器人也可以把采集到的現場信息反饋紿人。本文基于移動機器人原理,設計了兩輪驅動半自主移動機器人的硬件系統,詳細闡述了基于GPRS技術的遠程控制器的設計與實現。
1 遠程控制移動機器人系統組成
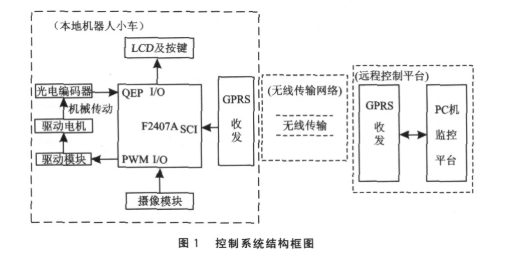
系統整體由遠程控制平臺、無線傳輸網絡以及本地機器人小車三個大部分組成。DSP是本地機器人小車的控制核心。TI公司的TMS320LF2407A芯片具有改進的哈佛結構體系,采用了流水線技術等優點,而且采用了高性能靜態CMOS/技術,把芯片運行電壓降低到3.3V,大大減少了芯片的功耗。其CPU具有很高酌處理速度,頻率可以達到40 MHz,很多復雜的算法在系統控制中得以實施。此外,它還集成了32 KB閃存、16個脈寬調制(PWM)通道、1個CAN模塊,以及1個超高速的500 ns的10位模數轉換器(ADC)等功能強大的外設。
整個系統以F2407A為控制器的核心,擴展了機器人本體的人機接口(LCD顯示及按鍵)模塊、環境攝像模塊、驅動電機模塊、光電編碼器反饋模塊以及GPRS人機交互模塊等。控制系統結構框圖如圖1所示。
1.1 機器人小車的定位模塊
機器人定位模塊主要由電機及其驅動電路、機械傳動系統及光電編碼器等組成。驅動輪和光電編碼器之間采用齒輪傳動,傳動比為i,光電編碼器的分辨率為N(即編碼器每旋轉一周輸出的脈沖數),驅動輪的半徑為r,則編碼器每輸出一個脈沖,對應的輪子在地面走過的距離為
電機控制采用脈寬調制(PWM)的調速方式,并以DSP自帶的正交編碼脈沖(QEP)電路采集光電編碼器的反饋信息,對電機進行閉環PID控制。利用QEP電路捕捉光電編碼器的反饋信號可以簡化程序的編制,同時采用PID控制原理,可以提高系統的控制精度和穩定性。
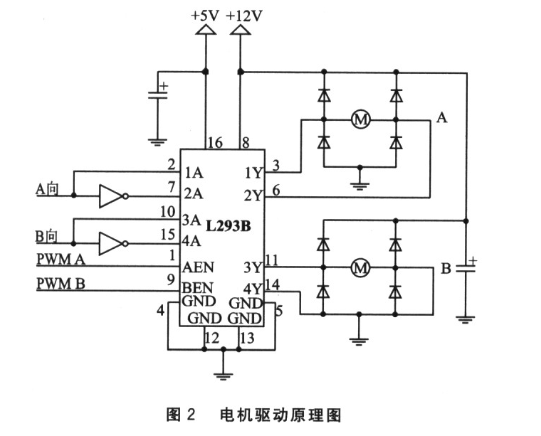
電機驅動原理圖如圖2所示。驅動主芯片為L293B,L293B直流電機驅動芯片允許電壓范圍在4.5"36V,內有四重推挽(雙重H橋集成功放電路)驅動電路,兩個通道可以向各自的電機提供l A的驅動電流,并且如果芯片過熱,芯片能夠自動關斷,保障系統不受損壞。當A向、B向為高電平時,則電機A、B電流分別由3腳流向6腳和11腳流向14腳,電機正轉;反之,當A向、B向為低電平時,電機電流分別由6腳流向3腳和14腳流向11腳,電機反轉。此時,可以用PWM控制芯片上電機使能腳的通斷時間比來對電機進行調速,F2407A型DSP芯片支持PWM輸出,因此可以很方便地對驅動電機進行調速。
由于DSP芯片自帶有正交編碼器捕捉模塊,因此該部分的電路設計比較簡單。光電編碼器輸出的正交脈沖信號經過非門加以穩定,進入DSP芯片的QEP電路被CPU捕獲并識別,再將識別后的信息作為PID控制算法的反饋輸入。
1.2 LCD顯示及攝像模塊
LCD顯示模塊和攝像模塊的數據格式都是8位,與單片機等微控制器的接口靈活簡單。攝像模塊可以輸出經壓縮后的JPEG格式圖像,因此數據量較小,減輕了控制器數據處理的負擔,同時縮短了GPRS傳輸一幀圖像的時間,實時性更好。F2407A提供了豐富的I/O接口,用I/O口可以很方便地對LCD模塊和攝像模塊進行數據的寫入和讀取。由于LCD模塊的數據是寫入的,而攝像模塊的數據是讀出的,因此可以分時復用同一組I/O口,而不會發生沖突。經設計,用不同的控制線分別控制這兩個模塊的使能端以實現分時復用,均用DSP的I/OPB0"I/OPB7作為它們的數據接口。
2 GPRS無線圖像傳輸
GPRS(General Packet Radio Selvice)是一種基于包的無線通信服務。它是一種新的GSM數據業務,可以給移動用戶提供無線分組數據接人服務。GPRS主要是給移動用戶和遠端的數據網絡之間提供一種連接,從而給移動用戶提供高速無線IP和無線X.25業務。
GPRS數據傳輸的優點是:
◇傳輸速率高;
◇實時在線;
◇按流量收費;
◇不受距離遠近的影響;
◇快捷登錄。
2.1 GPRS組網方式
在本系統中,利用GPRS移動通信網絡實現信息的雙向傳輸。機器人小車傳給遠程監控平臺的數據主要包括現場圖像信息和小車當前定位信息;遠程監控平臺傳給小車的主要是指令信息。
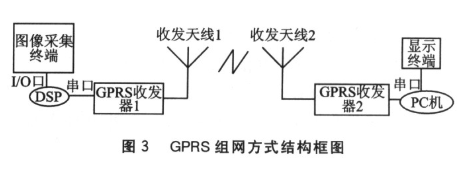
GPRS圖像采集模塊由采集終端、DSP外圍接口、GPRS收發器、PC機接口及監控中心軟件組成。圖像數據經采集后,由DSP串口傳輸給GPRS收發器1,由收發器l將圖像數據通過GPRS無線網絡發送出去,再由GPRS收發器2將接收到的圖像數據傳輸給PC機串口,接著監控中心軟件從PC機串口讀取數據并最終顯示在監控中心界面上,完成現場的實時監控。GPRS組網方式結構圖如圖3所示。
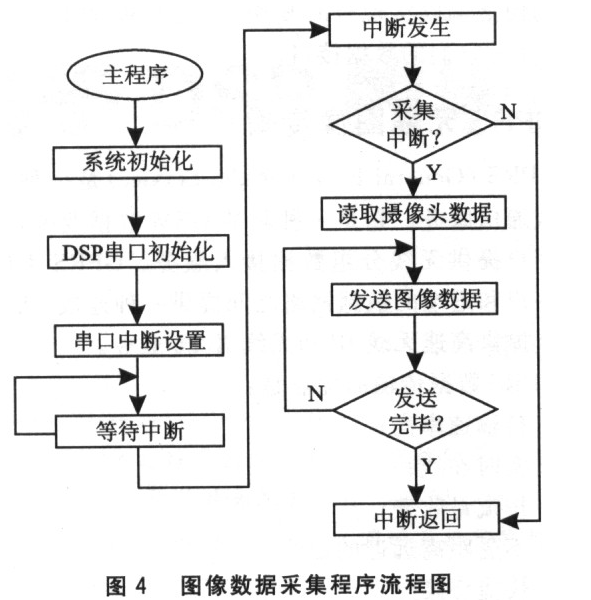
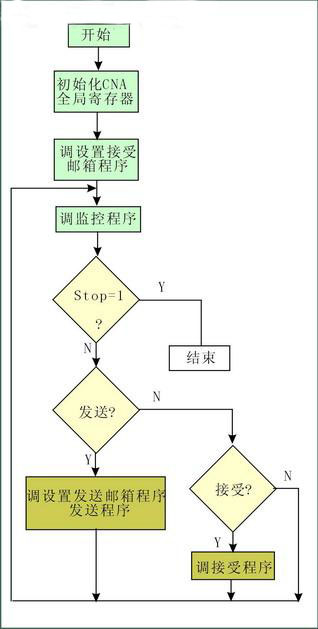
2.2 圖像數據采集程序流程圖
圖像采集過程包括DSP串口通信初始化和圖像數據發送兩大部分。監控中心發出采集圖像指令,經GPRS模塊把信號傳輸給DSP串口,啟動DSP串口的中斷服務,采集攝像頭圖像數據,并經由GPRS模塊將數據發送給遠程監控中心,完成一幀圖像的采集周期。圖像數據采集程序流程如圖4所示。
DSP芯片的軟件設計支持C語言、匯編語言以及兩者混合編程,由于本系統涉及到圖像數據處理、電機PID控制算法的實現和LCD顯示等,程序煩雜,編程工作量大,因此用混合編程的方法,可以較好地結合C語言和匯編語言的優點,編寫出效率較高的程序代碼。
2.3 數據傳輸協議
數據傳輸協議分為兩部分,一部分是尸C機發送給DSP的控制指令,另一部分是DSP發送給PC機的反饋信息。數據的傳輸格式采用數據包形式,因此必須對每次需要發送的數據進行打包處理,具體的數據包類型如下;

其中數據包的各單元定義如下:
◇起始標志位是一個字節,固定值0x00;
◇控制字是一個字節,值范圍為0x0l"0xff,具體代表的數據類型見2.3.1和2.3.2;
◇數據長度單元是兩個字節,值范圍為0x0001"0xffff,其中低字節在前,高字節在后,表示待發送數據的字節數;
◇待發送數據單元的字節數不定,內容由具體發送的數據內容決定;
◇數據校驗單元是一個字節,值為待發送數據的各個字節相異或得出;
◇結束標志位是一個字節,固定值為0x01。
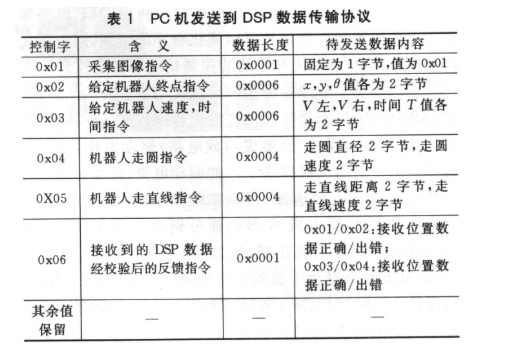
2.3.1 PC機到DSP的數據傳輸協議
PC機發送給微處理器DSP的數據類型包括采集圖像指令、給定機器人行走類型和應答反饋指令等。DSP接收到PC機送出的各類指令后,讀取數據內容,然后把數據內容的各個字節相異或,再把相異或得出的值與接收到的校驗碼進行比較,若相等則向PC反饋數據接收正確,進而轉入對應指令的中斷服務程序;若不相等則向PC機反饋數據接收出錯,申請重新發送指令。各指令定義如
表1所列。
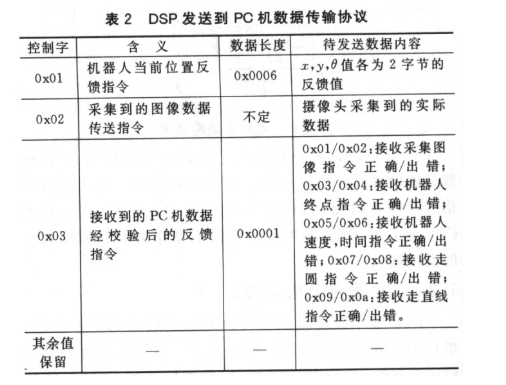
2.3.2 DSP到PC機的數據傳輸協議
DSP發送到PC機的數據類型主要包括機器人當前位置反饋數據、圖像數據以及DSP應答反饋指令等。PC機接收到數據后,進行校驗的處理過程和上節介紹的DSP接收數據后的處理過程一樣。機器人小車在行走的過程中,每隔一段時間會將自身當前位置的數據發送到PC機,實現實時路徑跟蹤,同時當DSP接收到上位機發出的采集圖像指令后,進行圖像采集,然后把采集到的圖像數據發送給PC機進行圖像顯示,實現了機器人小車周圍環境信息的實奔囁亍>嚀宓鬧噶疃ㄒ迦綾?所列。
3 實驗結果
監控中心軟件采用Delphi高級語言編制。在“控制指令”一欄中輸入Ol(Ol代表采集圖像指令),點擊“發 送”,隨后監控界面的“圖像監控”欄會顯示攝像頭采集到的遠程環境信息。
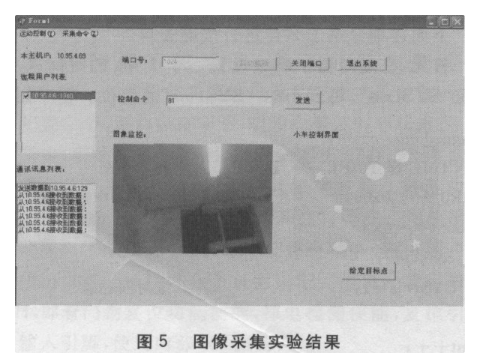
實驗時,攝像頭的分辨率調整為320×240,兩個GPRS收發器分別在相距4 m左右的房間兩端,圖5顯示了實驗結果。實驗結果表明:基于GPRS移動通信網絡和DSP技術的半自主移動機器人遠程系統達到了預期的效果。同時在實驗中也發現,GPRS傳輸數據的實時性是有限的,雖然理論上傳輸速率高達171 kb/s,但實際上受多種因素的影響,實際速率較低,傳輸一幀3K的JPEG格式圖像大約需要3O"60s的時間。因此,如何進一步提高系統的實時性是本系統面臨的最大挑戰。
責任編輯:gt
-
傳感器
+關注
關注
2551文章
51163瀏覽量
754143 -
dsp
+關注
關注
553文章
8011瀏覽量
349130 -
計算機
+關注
關注
19文章
7508瀏覽量
88070 -
GPRS
+關注
關注
21文章
984瀏覽量
129473 -
人工智能
+關注
關注
1791文章
47350瀏覽量
238750
發布評論請先 登錄
相關推薦
基于TMS320LF2407A的調音器設計
如何使用TMS320LF2407A的bootrom
基于TMS320LF2407A的全數字單相變頻器的設計及實現方法
TMS320LF2407A為數字控制系統的設計提供了參考
基于TMS320LF2407A直流電機閉環調速控制系統的設計
TMS320LF2407A基于CAN總線技術的數字交流伺服系
TMS320LF2407A實現教育機器人硬件平臺






 工商網監
工商網監
評論