


1 引言
工業以太網由于低成本、易于組網和具有相當高的數據傳輸速率、資源共享能力強以及易于Internet連接等特點[1],使其在工業中應用越來越多。Ethercat技術是德國BECKHOFF公司提出的實時工業以太網技術,它基于標準的以太網技術,具備靈活的網絡拓撲結構。系統配置簡單,具有高速、有效數據率高等特點,全雙工特性完全得以利用[2]。
2 Ethercat技術介紹
2.1 Ethercat的系統組成及運行原理
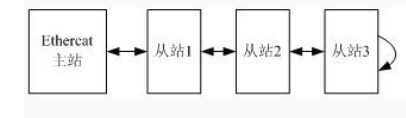
Ethercat采用了主從介質訪問方式,在基于Ethercat的通信系統中,主站控制從站發送或接收數據。主站發送數據幀,從站在數據幀經過從站時讀取相應報文中的輸出數據。同時,從站的輸入數據插入到同一數據幀的相關報文中。當該數據幀經過所有從站并與從站進行數據交換后,由Ethecat系統中末端從站將數據幀返回[3]。圖1由一個主站和3個從站組成的線性拓撲結構的簡單Ethercat系統。
2.2 Ethercat協議
Ethercat以標準以太網技術為基礎,在MAC(媒體訪問層)增加了一個確定性調度的軟件層,該軟件層實現了通信周期內的數據幀的傳輸。Ethercat采用標準的IEEE802-3以太網幀,幀結構如圖2。Ethercat在標準以太網幀結構中使用了一個特殊的以太網幀類型0x88A4,采用這種方式可以使控制數據直接寫入以太網幀內,并且可以與遵守其它協議的以太網幀在同一網絡中并行。
一個Ethercat幀中可以包含若干個Ethercat子報文,每個報文都服務于一塊邏輯過程映像區的特定內存區域,由FMMU(Fieldbus Memory Management Unit)寄存器和SM (SyncManager)寄存器定義,該區域最大可達4GB字節。Ethercat報文由一個16位的WKC(Working Count)結束,其數據區最大長度可達1486個字節。在報文頭中由8位命令區數據決定主站對從站的尋址方式,由于數據鏈獨立于物理順序,因此可以對Ethercat從站進行任意的編址[4]。
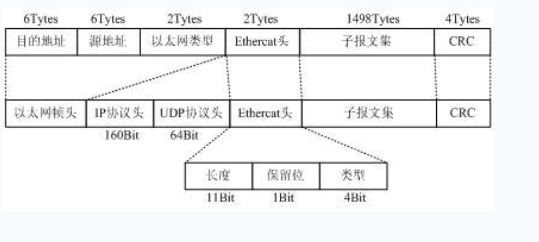
圖2 Ethercat幀結構
2.3 Ethercat性能
Ethercat整個協議處理過程都在硬件中進行。EtherCAT在網絡性能上達到了一個新的高度。1000個分布式I/O數據的刷新周期僅為30μs,其中包括端子循環時間。通過一個以太網幀,可以交換高達1486字節的過程數據,幾乎相當于12000個數字量I/O。而這一數據量的傳輸僅用300μs。100個伺服軸的通訊只需100μs[5]。在此期間,可以向所有軸提供設置值和控制數據,并報告它們的實際位置和狀態。分布式時鐘技術保證了這些軸之間的同步時間偏差小于1μs [6]。
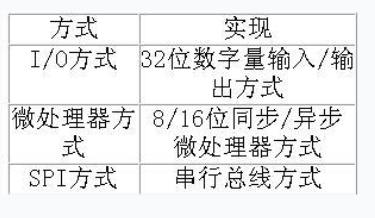
Ethercat從站節點的協議部分可以直接利用BECKHOFF公司的從站控制器ESC。ESC從站控制器提供3種接口規范如表1,具體采用哪一種方式可以設置控制器的EEPROM來選擇。
表1 接口規范
本文設計的Ethercat從站節點硬件包括從站協議控制器、從站CPU和網絡接口等部分組成。Ethercat從站中最關鍵部分是Ethercat協議控制器,它實現Ethercat的物理層與數據鏈路層的協議。現在市場上有多種Ethercat協議控制器可供使用,如FPGA實現和ASIC實現。從站CPU采用ARM920T核的S3C2440芯片。接口連接方式采用16位異步微處理器方式[7]。從站的硬件實現如圖3所示。
其中ARM控制器實現Ethercat對現場任務的收集與調度;Ethercat從站控制器實現Ethercat協議;EEPROM用于保存從站配置數據和從站描述數據;網絡接口用于主從站之間或從站與從站之間的連接,根據Ethercat從站控制器的不同網絡接口可以分別為2-4個,網絡接口采用標準以太網物理層器件就可以。
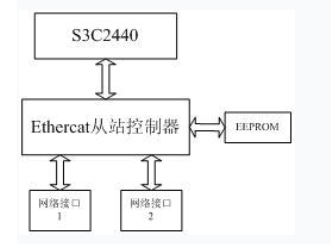
圖3 從站節點結構框圖
4 數據交換
主從站之間交換的數據主要分兩種形式:一種是周期性數據;另一種是非周期性數據。周期性數據傳輸可以根據任務的緊迫性劃分其優先級,通過采用EDF算法調度任務,把劃分好優先級的任務放入緩沖區供系統調用。緩沖區為在內存中分配的一段空間,兩端都可以訪問緩沖區中的數據;
非周期性數據采用郵箱方式傳輸,此時一端寫入數據到內存,且只有此段內存寫滿后另一端才能開始從內存中讀取數據,并且只能當內存中的數據全部讀出時,才能重新寫入數據。針對這兩種數據通信方式,從站程序可以對非周期性數據通信采用查詢方式,對周期性通信采用中斷方式,程序流程圖如圖4、圖5所示[8]。
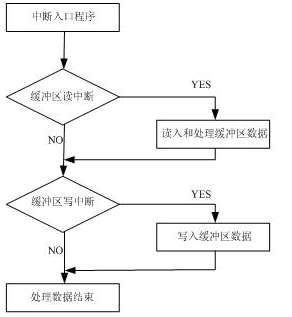
圖4 中斷方式
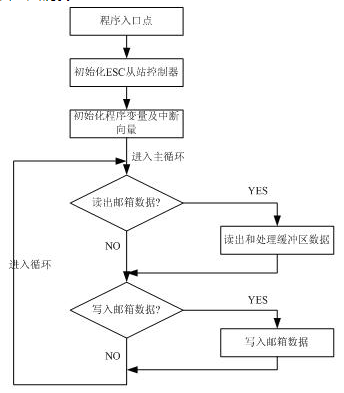
圖5 查詢方式
5 最小截止優先(EDF,Earliest Deadline First)算法
系統對周期性任務采用最小優先級優先算法進行調度,調度算法在ARM微控制器中實現。處理器對緊迫性事件的處理能力決定了系統處理突發事件的能力,把系統各種需要調度的任務按照緊迫程度用優先級來劃分,通過采用最小截止期優先算法來動態優先處理突發事件,很好地提高了Ethercat網絡實時性能。
EDF(Earliest Deadline First)是一種動態可搶占優先級實時調度,所有實時任務必須滿足以下限制條件:
(1)所有實時任務均為周期任務,且周期大于或等于截止期。
(2)所有實時任務必須在其截止期到來前結束。
(3)所有實時任務相互獨立。
(4)所有實時任務具有恒定的運動時間。
任務按周期由大到小排列為
EDF以任務的截止期與當前時刻的距離確定任務優先級(稱這一距離為時限距離),距離越近,優先級越高,因此,EDF總是選擇當前最迫切需要完成的任務獲得處理器。Liu和Layland證明如下:
對于由n個周期任務組成實時任務集,當且僅當:
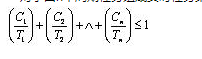
其中Ci為計算機時間,該任務集能夠由EDF調度。
EDF是最優動態可搶占優先級調度,對于任何實時任務集,只要存在可行的動態調度算法,則必可由EDF調度。需要注意的是,EDF只在出現任務實例就緒時調整任務的優先級。因為在其它時刻,任務實例按時限距離的長短的排序關系不變,因此任務間優先級的排序不變[9]。
6 結束語
EDF算法是對周期性任務的動態優先級調度算法,存在以下缺點:①調度算法是針對周期性任務而言的,沒有考慮對實時系統中突發任務(非周期性任務)的調度,且周期任務要求彼此獨立。②調度算對周期和時限寬度相同的同步周期任務,即使在處理器利用率很低的情況下,也可能產生不了合理的調度。因此在這種情況下,必須進行調度算法的可行性分析[10]。
編輯:jq
-
控制器
+關注
關注
114文章
17132瀏覽量
184537 -
cpu
+關注
關注
68文章
11086瀏覽量
217276 -
EDFA
+關注
關注
1文章
26瀏覽量
12397 -
工業以太網
+關注
關注
10文章
658瀏覽量
43081
發布評論請先 登錄

【米爾RK3576開發板免費體驗】3、移植EtherCAT Igh
FD40-110S48B3C3 FD40-110S48B3C3

FD30-36S18B3(C) FD30-36S18B3(C)
FD50-110S48B3C3 FD50-110S48B3C3
FD30-110S48B3C3 FD30-110S48B3C3
FD50-110S48B3(C)3 FD50-110S48B3(C)3
FD50-48S09B3(C) FD50-48S09B3(C)
FD20-110S40B3C3 FD20-110S40B3C3
FD12-110S24A3(C)3 FD12-110S24A3(C)3
FD6-36S24A3C3 FD6-36S24A3C3
FD6-110S05A3(C) FD6-110S05A3(C)
FW2-24S15C3 FW2-24S15C3
NN3-12S24C3N NN3-12S24C3N





 工商網監
工商網監

評論