") 車牌定位方法的類型及應(yīng)用特點(diǎn)研究
車牌定位方法的類型及應(yīng)用特點(diǎn)研究
1 引言
隨著國民經(jīng)濟(jì)的高速發(fā)展,高速公路、城市道路、停車場建設(shè)越來越多,對交通控制、安全管理的要求也日益提高,智能交通系統(tǒng)its(intelligent traffic system) 已成為世界交通領(lǐng)域研究的前沿課題。在此基礎(chǔ)上發(fā)展的車牌照識別lpr(license plate recognition)
系統(tǒng)是智能交通系統(tǒng)的重要組成部分,在交通管理中占有重要地位。lpr系統(tǒng)主要由三部分組成:車牌定位、字符分割、字符識別,其中車牌定位的成功與否直接影響是否能夠進(jìn)入車牌識別以及車牌識別的準(zhǔn)確率。主要的車牌定位方法:基于灰度圖像的車牌定位方法、基于小波變換的車牌定位方法、基于形態(tài)學(xué)的車牌定位方法、基于神經(jīng)網(wǎng)絡(luò)的車牌定位方法、基于支持向量機(jī)的車牌定位方法等。雖然這些算法在某些特定條件下識別效果較好,但綜合一些諸如天氣、背景、車牌磨損和圖像傾斜等干擾因素的影響,暫時(shí)還不能完全滿足實(shí)際應(yīng)用的要求,有必要進(jìn)行進(jìn)一步的研究。
2 車牌定位方法
2.1 基于灰度圖像的車牌定位方法
灰度數(shù)字圖像是每個(gè)像素只有一個(gè)采樣顏色的圖像。這類圖像通常顯示為從黑色到白色的灰度。為了便于車牌定位,將該圖像轉(zhuǎn)換成二值圖像,即只有黑色和白色兩種顏色的圖像。
此方法是應(yīng)用車牌的如下特點(diǎn):車牌牌照的字符和背景的對比度比較大,對應(yīng)于車牌區(qū)域的水平灰度變化比較頻繁;再者車牌一般掛在汽車的緩沖器上或附近,并靠近圖像的下部,干擾一般比較少。根據(jù)以上特點(diǎn),使用靠近水平方向的一階差分運(yùn)算,以突出灰度變化頻繁的區(qū)域。其一階差分運(yùn)算的算式為:
從車牌照是一個(gè)矩形這一特點(diǎn),我們可以判斷它所對應(yīng)的水平投影圖與車牌的形狀相仿,是一塊較為獨(dú)立的矩形區(qū)域,從水平投影圖中可以看車牌位置基本對應(yīng)于圖中從下到上的第一個(gè)較大的波峰,車牌投影值區(qū)域大致對應(yīng)于上述波峰值上、下鄰域的波谷之間所包含的投影值區(qū)域,且這兩個(gè)波谷大致對稱于波峰,波峰和波谷的變化率較大。在這個(gè)過程中最重要的是確定選擇哪個(gè)波峰,如果這個(gè)波峰的兩個(gè)波谷之間的值的高度都大于某一個(gè)設(shè)定的值,并且兩個(gè)波谷之間的寬度大致等于車牌照的高度,就認(rèn)定它所確定的區(qū)域就是車牌的水平位置。對于車牌垂直方向的定位算法:一般情況下,車牌的底色和字符的顏色的對比度很大,而且在一個(gè)相對范圍較小的范圍內(nèi)變化比較頻繁,通過這個(gè)特征確定車牌垂直方向。該方法對質(zhì)量較高的圖像有很好的定位,不過對于圖像中車前和車牌附近的車輛背景過多,容易導(dǎo)致錯誤的車牌定位。
2.2 基于小波變換的車牌定位方法
小波變換是20世紀(jì)80年代中后期在傅里葉分析的基礎(chǔ)上發(fā)展起來的一個(gè)重要的應(yīng)用數(shù)學(xué)分支。與傅里葉變換相比,小波變換具有較強(qiáng)的時(shí)、頻域局部分析能力。通過伸縮和平移等運(yùn)算功能對信號進(jìn)行多尺度細(xì)化分析,在高頻處取窄的時(shí)(空)間窗,在低頻處取寬的時(shí)(空) 間窗,克服了傅里葉分析無法同時(shí)在時(shí)域和頻域上取得良好局部特性的局限性,近年來這一方法在很多工程領(lǐng)域得到廣泛應(yīng)用。小波分析的核心是多分辨率分解,其良好的時(shí)—頻特性使其成為研究精細(xì)結(jié)構(gòu)的理想工具。在車牌圖像處理方面,經(jīng)過基于小波變換的高通濾波,車牌區(qū)域的橫、豎、撇、捺筆劃變得十分簡潔、明晰,與傳統(tǒng)算法中通過中值濾波等方法來濾除圖片中的噪聲干擾相比較,小波變換增強(qiáng)了處理的針對性,在降噪的同時(shí)增強(qiáng)了有用信息,便于在后續(xù)程序中獲取車牌區(qū)域的細(xì)節(jié)信息。南京航天航空的馬永一、宋錚等人將小波變換直接應(yīng)用于車牌定位,提出了一種直接對灰度圖像進(jìn)行除噪處理的方法。
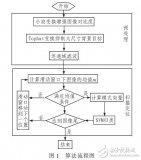
該方法是首先設(shè)計(jì)一個(gè)基于小波變換的濾波器,然后對圖片進(jìn)行x層小波變換之后對低頻部分llx進(jìn)行衰減,再進(jìn)行小波反變換即可實(shí)現(xiàn)高通濾波,濾除圖片中由于光照不均等多種因素造成的噪聲干擾突出車牌區(qū)域。在傳統(tǒng)的車牌定位算法中,都是先對圖像進(jìn)行二值化處理。對于原始的灰度圖像中存在很明顯的由光照不均引起的亮度差別,汽車的左半部分的亮度因建筑物遮擋比右半部分的亮度暗,同時(shí)右半部分也存在著局部的光線不足的情況下,如果直接進(jìn)行平均灰度整體閾值二值化,很容易出現(xiàn)由于閾值選取過高而造成車牌區(qū)域的不可辨識的情況,假如在程序中刻意降低閾值又會引入很多噪聲,失去了二值化的使用意義。如果使用局部閾值二值化,一方面增加了計(jì)算閾值的工作量,增加了處理時(shí)間,同時(shí)也可能會因?yàn)閰^(qū)域劃分的原因引發(fā)新的邊界噪聲干擾。使用基于小波變換的高通濾波處理后,圖片效果十分理想,不僅完全消除了光照不均造成的影響,而且使車牌區(qū)域更加突出,大大提高了定位查找的準(zhǔn)確率。但是降噪預(yù)處理時(shí)的重構(gòu)信號會丟失原有的時(shí)域特征。
2.3 基于形態(tài)學(xué)的車牌定位方法
數(shù)學(xué)形態(tài)學(xué)是由一組形態(tài)學(xué)的代數(shù)運(yùn)算子組成的,它的基本運(yùn)算有4個(gè):
膨脹、腐蝕、開啟和閉合,它們在二值圖像和灰度圖像中各有特點(diǎn)。基于這些基本運(yùn)算還可推導(dǎo)和組合成各種數(shù)學(xué)形態(tài)學(xué)實(shí)用算法,用它們可以進(jìn)行圖像形狀和結(jié)構(gòu)的分析及處理,包括圖像分割、特征抽取、邊界檢測、圖像濾波、圖像增強(qiáng)和恢復(fù)等。數(shù)學(xué)形態(tài)學(xué)方法利用一個(gè)稱作結(jié)構(gòu)元素的“探針”收集圖像的信息,當(dāng)探針在圖像中不斷移動時(shí),便可考察圖像各個(gè)部分之間的相互關(guān)系,從而了解圖像的結(jié)構(gòu)特征。上海大學(xué)的盧雅琴、鄔凌超基于形態(tài)學(xué)的思想提出了一種基于形態(tài)學(xué)的車牌定位方法。
該方法的具體步驟如下:首先對原始圖像進(jìn)行二值化處理,然后采用4×1的結(jié)構(gòu)元素對已二值化的圖像進(jìn)行濾波,去除圖像的噪聲。采用16×9的結(jié)構(gòu)元素再對去噪后的圖像進(jìn)行膨脹,然后再用同樣大小的結(jié)構(gòu)元素做腐蝕運(yùn)算,使車牌所在的區(qū)域形成連通的區(qū)域。然后標(biāo)記出圖像中所有的連通的區(qū)域,并計(jì)算出每個(gè)連通區(qū)域的外接矩形框,利用車牌的先驗(yàn)知識,確定車牌的位置。上述基于形態(tài)學(xué)處理的車牌定位方法,可以較好地確定圖像中車牌的位置,且算法簡單、實(shí)時(shí)性強(qiáng)。但是使用過大過小的結(jié)構(gòu)元素,都無法使車牌區(qū)域形成閉合的連通區(qū)域。因此結(jié)構(gòu)元素的選取非常重要。
2.4 基于神經(jīng)網(wǎng)絡(luò)的車牌定位方法
bp 神經(jīng)網(wǎng)絡(luò)是目前人工神經(jīng)網(wǎng)絡(luò)中研究最深入、應(yīng)用最為廣泛的一種模型,是bp(back propagation)學(xué)習(xí)算法在多層前饋網(wǎng)絡(luò)中的一種應(yīng)用模型。
bp網(wǎng)絡(luò)的實(shí)質(zhì)就是多層感知器(multi-layer perceptron,mlp),對于常用的三層(含有輸入層、隱含層和輸出層)網(wǎng)絡(luò)來說,第一層屬于輸入層,接受輸入向量;第二層屬于隱含層,用于記憶,增加網(wǎng)絡(luò)的可調(diào)參數(shù),使網(wǎng)絡(luò)輸出更加精確;第三層屬于輸出層,輸出網(wǎng)絡(luò)結(jié)果。相鄰層之間的節(jié)點(diǎn)屬于全連接,相同層之間的節(jié)點(diǎn)沒有連接。理論上,對于三層bp網(wǎng)絡(luò)只要使得對隱含層的節(jié)點(diǎn)增大到一定的范圍就可以擬合任何非線性函數(shù)。bp算法由正向傳播和反向傳播組成。正向傳播是輸入信號從輸入層經(jīng)隱含層傳向輸出層,若輸出層得到期望的輸出,則算法結(jié)束;否則,轉(zhuǎn)至反向傳播。反向傳播就是將誤差信號(樣本輸出與網(wǎng)絡(luò)輸出之差)按原連接通路反向計(jì)算,由梯度下降法調(diào)整各層神經(jīng)元的權(quán)值,使誤差信號減小,直至誤差達(dá)到期望的誤差。
該方法主要利用神經(jīng)網(wǎng)絡(luò)進(jìn)行模式識別的一些優(yōu)勢:其一,它允許對問題的了解較少;其二,它可以實(shí)現(xiàn)特征空間中比較復(fù)雜的劃分。基于神經(jīng)網(wǎng)絡(luò)的車牌定位方法主要分以下步驟,首先對bp網(wǎng)絡(luò)進(jìn)行訓(xùn)練,選取各種情況下的車牌圖像,將其轉(zhuǎn)換成灰度圖像,每一幅圖像的全部灰度值作為網(wǎng)絡(luò)的一組輸入向量,如果是含牌照的汽車圖像,則設(shè)定其網(wǎng)絡(luò)輸出為高(0.9),否則為低(0.1),反復(fù)訓(xùn)練直至達(dá)到理想的效果。然后對實(shí)際圖像進(jìn)行預(yù)處理:灰度化,直方圖化,濾波器濾波,增強(qiáng)圖像并去除圖像的噪聲。最后用一個(gè)m×n的滑動窗口(m×n根據(jù)實(shí)際車牌的寬高比例設(shè)定)逐個(gè)像素地遍歷預(yù)處理后的圖像,窗口內(nèi)子圖像的數(shù)據(jù)經(jīng)過歸一化后送到神經(jīng)網(wǎng)絡(luò)的輸入端作為輸入向量,如果神經(jīng)網(wǎng)絡(luò)輸出為高,則可判斷此滑窗所在位置有車牌,否則無車牌。利用神經(jīng)網(wǎng)絡(luò)進(jìn)行車牌的定位,其優(yōu)點(diǎn)在于可以充分利用神經(jīng)網(wǎng)絡(luò)的自適應(yīng)性,但這種方法也存在缺點(diǎn),即需要花費(fèi)一些時(shí)間進(jìn)行網(wǎng)絡(luò)的訓(xùn)練。如何縮短神經(jīng)網(wǎng)絡(luò)的訓(xùn)練時(shí)間,即提高其收斂速度是一個(gè)研究的難點(diǎn)。
2.5 基于支持向量機(jī)的定位方法
支持向量機(jī)(svm) 是20 世紀(jì)90年代初由vap2nik等人提出的一類新型機(jī)器學(xué)習(xí)方法,主要用于解決有限樣本情況下的模式識別問題。此方法能夠在訓(xùn)練樣本很少的情況下達(dá)到很好的分類推廣能力。由于車牌區(qū)域有著的紋理,尋找一種良好性能的分類器,凸現(xiàn)這種紋理特征,使它與其它區(qū)域區(qū)別開來。支持向量機(jī)(support vector machine,svm) 正是這樣一種分類學(xué)習(xí)機(jī)制。
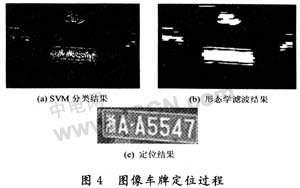
所以對車牌定位的研究,提出一種基于支持向量機(jī)的定位方法。首先將圖像分割為n×n大小的子塊,提出每個(gè)子塊的灰度特征,訓(xùn)練svm分類器;然后用訓(xùn)練好的分類器進(jìn)行牌照子塊和非牌照子塊的分類,再使用數(shù)學(xué)形態(tài)學(xué)濾波和區(qū)域合并;最后運(yùn)用投影方法定位牌照區(qū)域。實(shí)驗(yàn)結(jié)果表明,該方法能比較好地定位牌照區(qū)域,但是由于svm算法對大規(guī)模訓(xùn)練樣本難以實(shí)施,并且用svm解決多分類問題也存在困難,如果能解決這個(gè)問題車牌定位將會更精確。
3 結(jié)束語
本文在現(xiàn)有的車牌照識別系統(tǒng)的基礎(chǔ)上,對近年來國內(nèi)出現(xiàn)的車牌定位方法進(jìn)行了全面的綜述,車牌定位是車牌識別中的關(guān)鍵。上述車牌定位方法在理想條件下很好,但是由于車牌背景的復(fù)雜性與車牌特征的多樣性,研究更實(shí)用的車牌定位方法是下一步要做的。如果將上述某些方法的特點(diǎn)相結(jié)合,集各家所長,有可能研究一種更好的車牌定位方法。
責(zé)任編輯:gt
-
濾波器
+關(guān)注
關(guān)注
161文章
7795瀏覽量
177996 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4771瀏覽量
100715
發(fā)布評論請先 登錄
相關(guān)推薦
一種車牌識別系統(tǒng)中的混合車牌定位方法
一種新的快速自適應(yīng)車牌定位方法
基于數(shù)學(xué)形態(tài)學(xué)的車牌精定位算法的研究
基于紋理和顏色的模糊車牌的增強(qiáng)與定位
常用車牌定位算法淺析
復(fù)雜車輛圖像中的車牌定位
支持向量機(jī)的車牌定位設(shè)計(jì)方法
基于圖像處理和投影的車牌定位方法

基于DCT的車牌定位算法的設(shè)計(jì)及應(yīng)用
車牌定位算法的研究及設(shè)計(jì)

基于小波變換和Tophat變換的車牌定位算法
多種特征的車牌定位算法

利用牌照區(qū)域灰度變化頻率的方法對車牌定位





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論