") 基于MSP430單片機(jī)實(shí)現(xiàn)六自由度機(jī)械手模塊的設(shè)計(jì)
基于MSP430單片機(jī)實(shí)現(xiàn)六自由度機(jī)械手模塊的設(shè)計(jì)
當(dāng)代科學(xué)技術(shù)發(fā)展的特點(diǎn)之一就是機(jī)械技術(shù),電子技術(shù)和信息技術(shù)的結(jié)合,機(jī)器人就是這種結(jié)合的產(chǎn)物之一。現(xiàn)代機(jī)器人都是由機(jī)械發(fā)展而來(lái)。與傳統(tǒng)的機(jī)器的區(qū)別在于,機(jī)器人有計(jì)算機(jī)控制系統(tǒng),因而有一定的智能,人類可以編制動(dòng)作程序,使它們完成各種不同的動(dòng)作。六自由度自動(dòng)尋跡搬運(yùn)機(jī)器人就是其中一種,這種搬運(yùn)機(jī)器人不但能夠代替人的某些功能,有時(shí)還能超過(guò)人的體力能力,可以24小時(shí)甚至更長(zhǎng)時(shí)間連續(xù)重復(fù)運(yùn)轉(zhuǎn),還可以承受各種惡劣環(huán)境,因此,搬運(yùn)機(jī)器人是人體局部功能的延長(zhǎng)和發(fā)展。
本設(shè)計(jì)主要應(yīng)用單片機(jī)MSP430作為控制核心,直流電機(jī)、熱釋電型紅外傳感器等相結(jié)合的系統(tǒng)。它充分發(fā)揮了單片機(jī)的性能,其優(yōu)點(diǎn)硬件電路簡(jiǎn)單,軟件功能完善,控制系統(tǒng)可靠,性價(jià)比較高等特點(diǎn),具有一定的使用和參考價(jià)值。
1 系統(tǒng)原理
1.1 自動(dòng)尋跡模塊的系統(tǒng)原理
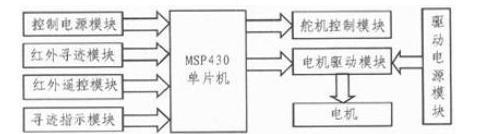
本設(shè)計(jì)中自動(dòng)尋跡模塊主要由單片機(jī)及其外同電路、紅外尋跡電路、直流電機(jī)控制電路等組成。正常工作時(shí),單片機(jī)循環(huán)檢測(cè)紅外尋跡電路輸出信號(hào),據(jù)此產(chǎn)生直流電機(jī)控制信號(hào),當(dāng)系統(tǒng)檢測(cè)到工作方式發(fā)生改變時(shí),系統(tǒng)進(jìn)入相應(yīng)方式。其原理框圖如圖1、圖2所示。

圖1 自動(dòng)尋跡模塊原理框圖
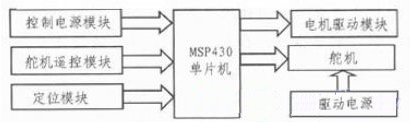
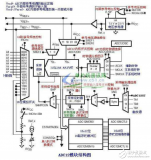
圖2 自動(dòng)尋跡模塊原理框圖
1.2 六自由度機(jī)械手模塊的系統(tǒng)原理
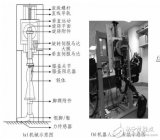
系統(tǒng)的設(shè)計(jì)采用模塊化的方法,將機(jī)械于劃分為基座、手臂、手腕、手部4部分。控制器以MSP430單片機(jī)為主控制器,具體控制部分框圖見圖3。
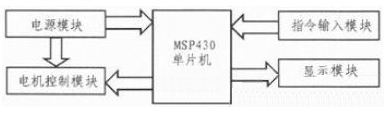
圖3 六自由度模塊的原理框圖
2 系統(tǒng)設(shè)計(jì)
2.1 自動(dòng)尋跡模塊硬件設(shè)計(jì)
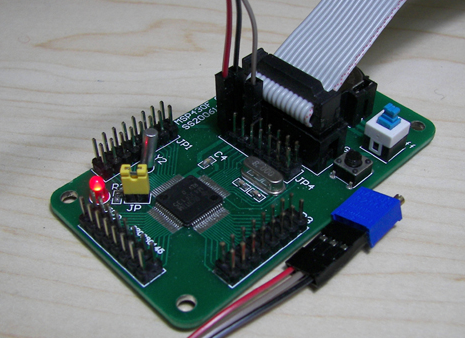
1)基本單片機(jī)系統(tǒng)
尋跡機(jī)器人系統(tǒng)的控制核心,一般情況下以MSP430單片機(jī)片內(nèi)的基本硬件資源為主,有必要時(shí)再擴(kuò)展部分外部器件。在本設(shè)計(jì)中需要完成的控制比較簡(jiǎn)單,以單片機(jī)片內(nèi)的基本硬件資源完全可以實(shí)現(xiàn),因此不需擴(kuò)展。
2)放大信號(hào)電路
采用LM324控制,LM324是四運(yùn)放集成電路,它采用14腳雙列直插塑料封裝,內(nèi)部包含四組形式完全相同的運(yùn)算放大器,除電源共用外,四組運(yùn)放相互獨(dú)立。
3)電動(dòng)機(jī)驅(qū)動(dòng)電路
所選用的電動(dòng)機(jī)為普通的直流電機(jī),在MSP430單片機(jī)的控制下,可接一個(gè)電機(jī)驅(qū)動(dòng)芯片或者通過(guò)其他的一些原件可使電機(jī)轉(zhuǎn)動(dòng)。本系統(tǒng)為了設(shè)計(jì)簡(jiǎn)單,采用其他方式代替了電路驅(qū)動(dòng)芯片。
2.2 六自由度機(jī)械手模塊硬件設(shè)計(jì)
六自由度機(jī)械手是由6個(gè)伺服電機(jī)驅(qū)動(dòng)的機(jī)器手臂。除了構(gòu)成手臂的4個(gè)關(guān)節(jié)、手腕1個(gè)關(guān)節(jié)外,再加上手部的夾持,實(shí)現(xiàn)了1個(gè)機(jī)械手的機(jī)械結(jié)構(gòu)。
該控制模塊采用5 V直流電源分別為單片機(jī)和機(jī)械手臂的電機(jī)供電,電路包括手動(dòng)復(fù)位電路、晶振電路、矩陣鍵盤、用以控制單片機(jī)轉(zhuǎn)角的控制的獨(dú)立鍵盤、伺服電機(jī)接入口,并可通過(guò)顯示屏顯示被選電機(jī)標(biāo)識(shí)號(hào)和該電機(jī)轉(zhuǎn)動(dòng)的角度。
3 軟件設(shè)計(jì)
本系統(tǒng)的軟件設(shè)計(jì)面向硬件,選用C語(yǔ)言編程。最主要部分是單片機(jī)控制電機(jī)轉(zhuǎn)動(dòng)(包括正轉(zhuǎn)反轉(zhuǎn))、時(shí)間的延遲和PID算法,具體的設(shè)計(jì)流程圖見圖4和圖5。
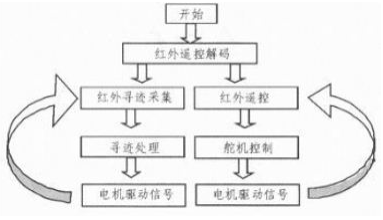
圖4 自動(dòng)尋跡模塊控制流程圖
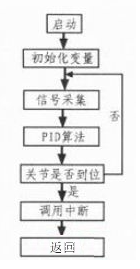
圖5 六自由度模塊流程圖
4 系統(tǒng)調(diào)試
1)程序編完后,對(duì)代碼仔細(xì)逐行檢查。檢查代碼的錯(cuò)誤,建立自己的代碼檢查表,對(duì)經(jīng)常易錯(cuò)的地方進(jìn)行檢查。檢查代碼是否符合編程規(guī)范。
2)調(diào)試程序看是否能仿真,如果運(yùn)行正常再將在編譯器中調(diào)試好的程序燒寫至單片機(jī)。
3)在接上電源時(shí),觀察整體電路是否按照預(yù)計(jì)設(shè)計(jì)的運(yùn)作,電機(jī)是否正轉(zhuǎn),電機(jī)是否反轉(zhuǎn)等。可根據(jù)電路的運(yùn)行情況推測(cè)出程序出錯(cuò)的部分,修改程序后再經(jīng)過(guò)編譯器調(diào)試后燒到單片機(jī),反復(fù)檢測(cè)直到能工作完全正常。
5 結(jié)束語(yǔ)
本系統(tǒng)為單片機(jī)的尋跡機(jī)器人系統(tǒng),主要應(yīng)用單片機(jī)MSP430作為控制核心,直流電機(jī)、舵機(jī)、一體紅外接收頭等相結(jié)合的系統(tǒng)。這個(gè)系統(tǒng)軟硬件設(shè)計(jì)簡(jiǎn)單,易于開發(fā),嚴(yán)格控制各種元件的采購(gòu)成本,所以價(jià)格低廉,安全可靠,操作方便。
責(zé)任編輯:gt
-
集成電路
+關(guān)注
關(guān)注
5387文章
11530瀏覽量
361630 -
單片機(jī)
+關(guān)注
關(guān)注
6035文章
44554瀏覽量
634631 -
運(yùn)算放大器
+關(guān)注
關(guān)注
215文章
4929瀏覽量
172833
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
利用單片機(jī)MSP430作為控制核心實(shí)現(xiàn)六自由度自動(dòng)尋跡機(jī)械人的設(shè)計(jì)
MSP430單片機(jī)的開發(fā)及應(yīng)用
MSP430單片機(jī)C語(yǔ)言的基本結(jié)構(gòu)
MSP430單片機(jī)概述
MSP430單片機(jī)軟件工程開發(fā)基礎(chǔ)
基于兩自由度髖關(guān)節(jié)運(yùn)動(dòng)和MSP430單片機(jī)的機(jī)器人假肢控制系統(tǒng)
MSP430單片機(jī)實(shí)踐篇之MSP430單片機(jī)ADC模數(shù)轉(zhuǎn)換操作
MSP430單片機(jī)ADC模數(shù)轉(zhuǎn)換操作
如何使用MSP430單片機(jī)進(jìn)行多機(jī)串口通信的設(shè)計(jì)
MSP430系列單片機(jī)(1)——基本知識(shí)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論