") 探究關于DSP的農業(yè)機器人關節(jié)控制器
探究關于DSP的農業(yè)機器人關節(jié)控制器
本課題的研究目標是以實驗室已有的有四個關節(jié)和一個末端執(zhí)行器的采摘機器人為控制對象,研制四關節(jié)運動控制平臺,實現高精度控制,同時盡量降低控制器的成本,以降低機器人的整體成本,從而促進將來農業(yè)機器人的推廣和應用。
農業(yè)機器人不僅可以解決勞動力的不足,還可以提高勞動生產率,改善農業(yè)生產環(huán)境,農業(yè)機器人的研究在國內外受到廣泛重視。控制系統是機器人的核心,決定機器人的性能和作業(yè)效果。基于pc104工控機和pmac2-104多軸運動控制卡的開放式控制平臺在農業(yè)機器人控制系統中應用比較廣泛,但價格昂貴。農業(yè)機器人的購買對象為農戶,這就要求機器人的價格低廉。本課題的研究目標是以實驗室已有的有四個關節(jié)和一個末端執(zhí)行器的采摘機器人為控制對象,研制四關節(jié)運動控制平臺,實現高精度控制,同時盡量降低控制器的成本,以降低機器人的整體成本,從而促進將來農業(yè)機器人的推廣和應用。
農業(yè)機器人關節(jié)控制器的方案選擇
控制精度高、響應速度快、價格低廉是農業(yè)機器人關節(jié)控制器三個最重要的設計指標。由于永磁同步電機具有結構簡單、動態(tài)響應快、定位準確的特點。本研究采用安川公司的交流伺服電機作為執(zhí)行電機。 機器人控制系統需要完成的任務相當大,對控制系統的硬、軟件都提出了較高的要求,本課題所研究的控制系統采用上、下位機二級分布式結構。
利用pc機作為上位機,主要完成整個系統的管理、運動學計算以及通信任務;下位機控制器由4個獨立的關節(jié)控制器組成,各關節(jié)控制器負責本關節(jié)的運動控制和反饋信號的處理,它們是并行工作的。
dsp(digital signal processor)芯片,如tms320x240x系列,內部集成了專用外設、具有硬件乘法器,采用哈佛結構,采用流水線操作的指令系統,并且采用特殊的dsp指令,從而具有快速指令周期,高速運算和進行大量數據處理的能力,可實現復雜控制算法。因此,本研究采用ti公司的tms320lf2407a芯片作為下位機的處理器,用來完成clarke變換、park變換、park逆變換、pid控制等功能。
該控制系統中采用三閉環(huán)(電流環(huán)、速度環(huán)、位置環(huán))位置伺服控制方案,以保證控制系統的位置精度。系統控制框圖如圖1所示。
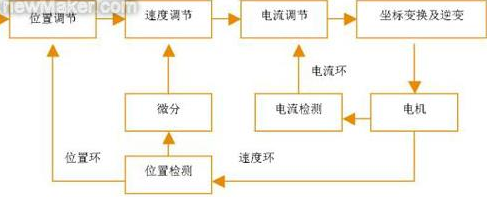
圖1 系統控制框圖
本研究中采用直軸電樞電流為零的控制策略[7]即pmsm定子電樞電流在控制過程中始終等于0,定子電流中只有交軸分量,且定子磁動勢空間矢量與轉子永磁體磁場空間矢量正交,電動機轉矩中只有永磁轉矩分量,電磁轉矩與交軸電樞電流幅值成正比,控制轉矩的大小實際上就落實到控制定子電流幅值的大小。本課題采用的交流伺服電機是表面凸極式pmsm,采用直軸電樞電流為零的控制策略時,單位定子電流可獲得最大的轉矩,銅耗下降,效率有所提高。
機器人關節(jié)控制器硬件結構設計
由于本課題采用矢量控制方法來控制伺服電機,每個電機需要6個pwm信號來控制智能功率模塊ipm中igbt的通斷,而每片dsp芯片只含有兩個事件管理器,最多只能控制兩個伺服電機。本課題制作了2塊基于dsp的運動控制板,以控制四個交流伺服電機。圖2為關節(jié)控制器硬件結構示意圖。
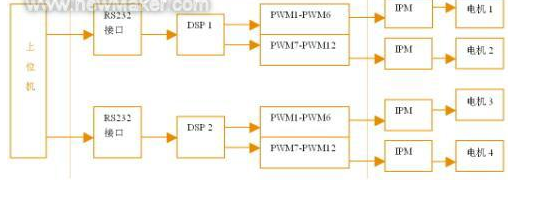
圖2 關節(jié)控制器硬件結構示意圖
機器人關節(jié)控制系統在硬件上分為兩部分:基于dsp控制器的控制電路和基于ipm的伺服電機驅動電路。
關節(jié)控制器控制電路包括三大部分:tms320lf2407a最小系統部分、系統擴展部分和接口電路部分。其中最小系統部分包括電源電路、時鐘電路、復位電路;系統擴展部分包括存儲器擴展電路、總線擴展、顯示電路;接口電路部分包括rs232接口電路、jtag仿真接口。
功率驅動電路板主要實現pwm逆變器功能,實現電機相電流的檢測和位置檢測。功率驅動電路主要有電源部分、逆變部分、隔離部分和電流采集部分。本研究中選擇三菱公司的智能功率模塊pm15csj060作為逆變模塊,使用m57140模塊為其提供4路15v的電壓,采用hcpl4504作為光耦隔離器件,進行了電源電路,隔離電路和電流采集電路的設計。
機器人關節(jié)控制器軟件設計
機器人關節(jié)控制系統軟件包括基于pc機的上位機控制器軟件和基于dsp控制板的下位機控制軟件兩部分。
上位機程序
上位機軟件在microsoft visual c++環(huán)境下開發(fā),主要包括4部分:人機交互界面的設計、系統主程序、運動控制函數庫和通訊接口函數。上位機主程序工作在pc機上,用來實現整個系統的管理、控制工作。運動控制函數庫是在實驗室其他成員研究的運動學模型及求解結論的基礎上,編寫了相關的運動學運算函數。通訊接口程序實現上位pc機與dsp控制板之間的通訊,把上位機的運算結果傳送到下位機,本課題采用的是api函數編程方式。
下位機程序
下位機控制器軟件部分的設計是基于dsp的關節(jié)控制板,在ccs2.0開發(fā)環(huán)境下編寫。下位機控制器軟件主要包括3部分:初始化模塊、主程序模塊、中斷模塊。
系統初始化主要完成對dsp內核、事件管理器、通用i/o、sci和adc轉換器等資源的寄存器進行設置。
主程序部分負責整個關節(jié)控制器的管理,設計成循環(huán)等待方式,在初始化和關節(jié)復位工作完成后,就等待各中斷信號,如果有中斷產生,則調用相關的中斷程序。
中斷模塊:本課題使用了4個中斷,功率保護中斷、cap3中斷、定時器1下溢中斷和串口通信中斷。其中,定時器1下溢中斷子程序(int2)在定時器1計數溢出時被響應,用來調用控制算法,執(zhí)行系統的矢量控制程序,每一個載波周期完成一次。
實驗
為了測試本課題研究的農業(yè)機器人關節(jié)控制器的性能,對所研制的控制系統進行了試驗。
試驗用的4個交流伺服電機的型號為sgmah02a (2個)、sgmah01a、sgmaha5a 。將上位pc機、dsp下位機運動控制板、功率驅動板和伺服電機按設計要求連接好,接通電源,啟動pc機,進入用vc++設計的人機交互界面。單個電機的運動試驗環(huán)境如圖3所示。
圖3 單個電機運動試驗環(huán)境
試驗中設定各關節(jié)電機需要運行的圈數、速度和運轉方向,點擊“啟動”鍵,電機開始運轉。試驗過程中分別對各個關節(jié)電機進行了調試,試驗結果表明本課題所研制的關節(jié)控制器能實現電機的正、反轉和速度調節(jié)。在電機長時間運行時,dsp控制電路板和基于ipm的功率驅動板狀態(tài)良好。
編輯:jq
-
dsp
+關注
關注
555文章
8078瀏覽量
352191 -
芯片
+關注
關注
459文章
51600瀏覽量
429905 -
控制器
+關注
關注
113文章
16580瀏覽量
180456 -
電樞電流
+關注
關注
0文章
7瀏覽量
1596
發(fā)布評論請先 登錄
相關推薦
關節(jié)電機驅動,解鎖智能機器人 的“靈動” 密碼

霍爾元件DH49E在機器人的關節(jié)位置中的應用
機器人關節(jié)的靈動之源:揭秘舵機的技術奧秘
運用在機器人關節(jié)控制領域的磁性旋轉編碼器芯片-AME200

機器人關節(jié)模組為何選擇雙編碼器設計?

工業(yè)機器人控制器的主要功能有哪些
人形機器人控制器之MCU、DSP、AI芯片
柔性機器人和剛性機器人有什么區(qū)別?

惡劣環(huán)境的克星:升級版LP20系列工業(yè)連接器為農業(yè)機器人帶來更強選擇

如何使用PLC控制機器人
工業(yè)機器人控制系統的基本組成有哪些
基于飛凌嵌入式RK3568J核心板的工業(yè)機器人控制器應用方案
泰科機器人攜新款行星滾柱絲杠線性關節(jié)模組和雙臂協作機器人亮相2024年ITES深圳工業(yè)展

基于鴻道(Intewell?)操作系統研發(fā)的農業(yè)機器人操作系統
基于OpenVINO?的諾達佳機器人控制器實戰(zhàn)






 工商網監(jiān)
工商網監(jiān)
評論