") 如何在OpenCV中使用基于深度學(xué)習(xí)的邊緣檢測(cè)
如何在OpenCV中使用基于深度學(xué)習(xí)的邊緣檢測(cè)
導(dǎo)讀
分析了Canny的優(yōu)劣,并給出了OpenCV使用深度學(xué)習(xí)做邊緣檢測(cè)的流程,文末有代碼鏈接。
在這篇文章中,我們將學(xué)習(xí)如何在OpenCV中使用基于深度學(xué)習(xí)的邊緣檢測(cè),它比目前流行的canny邊緣檢測(cè)器更精確。邊緣檢測(cè)在許多用例中是有用的,如視覺(jué)顯著性檢測(cè),目標(biāo)檢測(cè),跟蹤和運(yùn)動(dòng)分析,結(jié)構(gòu)從運(yùn)動(dòng),3D重建,自動(dòng)駕駛,圖像到文本分析等等。
什么是邊緣檢測(cè)?
邊緣檢測(cè)是計(jì)算機(jī)視覺(jué)中一個(gè)非常古老的問(wèn)題,它涉及到檢測(cè)圖像中的邊緣來(lái)確定目標(biāo)的邊界,從而分離感興趣的目標(biāo)。最流行的邊緣檢測(cè)技術(shù)之一是Canny邊緣檢測(cè),它已經(jīng)成為大多數(shù)計(jì)算機(jī)視覺(jué)研究人員和實(shí)踐者的首選方法。讓我們快速看一下Canny邊緣檢測(cè)。
Canny邊緣檢測(cè)算法
1983年,John Canny在麻省理工學(xué)院發(fā)明了Canny邊緣檢測(cè)。它將邊緣檢測(cè)視為一個(gè)信號(hào)處理問(wèn)題。其核心思想是,如果你觀察圖像中每個(gè)像素的強(qiáng)度變化,它在邊緣的時(shí)候非常高。
在下面這張簡(jiǎn)單的圖片中,強(qiáng)度變化只發(fā)生在邊界上。所以,你可以很容易地通過(guò)觀察像素強(qiáng)度的變化來(lái)識(shí)別邊緣。
現(xiàn)在,看下這張圖片。強(qiáng)度不是恒定的,但強(qiáng)度的變化率在邊緣處最高。(微積分復(fù)習(xí):變化率可以用一階導(dǎo)數(shù)(梯度)來(lái)計(jì)算。)

Canny邊緣檢測(cè)器通過(guò)4步來(lái)識(shí)別邊緣:
去噪:因?yàn)檫@種方法依賴于強(qiáng)度的突然變化,如果圖像有很多隨機(jī)噪聲,那么會(huì)將噪聲作為邊緣。所以,使用5×5的高斯濾波器平滑你的圖像是一個(gè)非常好的主意。
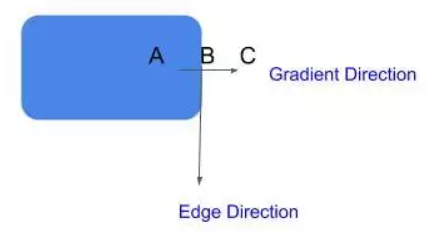
梯度計(jì)算:下一步,我們計(jì)算圖像中每個(gè)像素的強(qiáng)度的梯度(強(qiáng)度變化率)。我們也計(jì)算梯度的方向。
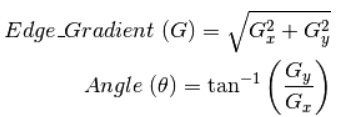
梯度方向垂直于邊緣,它被映射到四個(gè)方向中的一個(gè)(水平、垂直和兩個(gè)對(duì)角線方向)。
非極大值抑制:現(xiàn)在,我們想刪除不是邊緣的像素(設(shè)置它們的值為0)。你可能會(huì)說(shuō),我們可以簡(jiǎn)單地選取梯度值最高的像素,這些就是我們的邊。然而,在真實(shí)的圖像中,梯度不是簡(jiǎn)單地在只一個(gè)像素處達(dá)到峰值,而是在臨近邊緣的像素處都非常高。因此我們?cè)谔荻确较蛏先?×3附近的局部最大值。
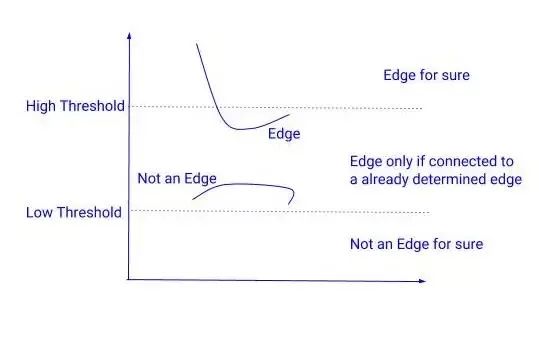
遲滯閾值化:在下一步中,我們需要決定一個(gè)梯度的閾值,低于這個(gè)閾值所有的像素都將被抑制(設(shè)置為0)。而Canny邊緣檢測(cè)器則采用遲滯閾值法。遲滯閾值法是一種非常簡(jiǎn)單而有效的方法。我們使用兩個(gè)閾值來(lái)代替只用一個(gè)閾值:
高閾值 = 選擇一個(gè)非常高的值,這樣任何梯度值高于這個(gè)值的像素都肯定是一個(gè)邊緣。
低閾值 = 選擇一個(gè)非常低的值,任何梯度值低于該值的像素絕對(duì)不是邊緣。
在這兩個(gè)閾值之間有梯度的像素會(huì)被檢查,如果它們和邊緣相連,就會(huì)留下,否則就會(huì)去掉。
遲滯閾值化
Canny 邊緣檢測(cè)的問(wèn)題:
由于Canny邊緣檢測(cè)器只關(guān)注局部變化,沒(méi)有語(yǔ)義(理解圖像的內(nèi)容)理解,精度有限(很多時(shí)候是這樣)。
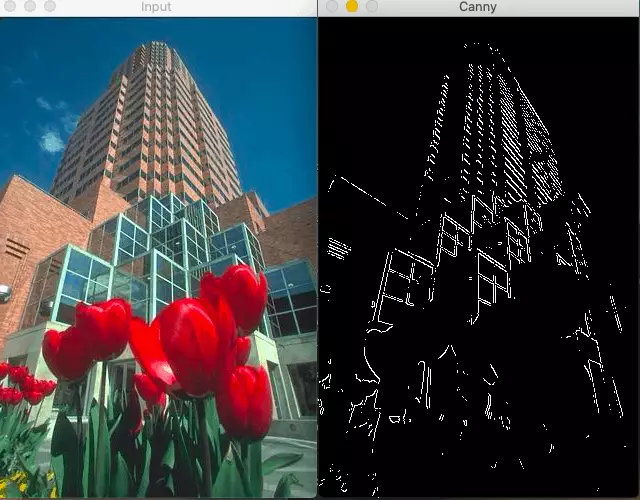
Canny邊緣檢測(cè)器在這種情況下會(huì)失敗,因?yàn)闆](méi)有理解圖像的上下文
語(yǔ)義理解對(duì)于邊緣檢測(cè)是至關(guān)重要的,這就是為什么使用機(jī)器學(xué)習(xí)或深度學(xué)習(xí)的基于學(xué)習(xí)的檢測(cè)器比canny邊緣檢測(cè)器產(chǎn)生更好的結(jié)果。
OpenCV中基于深度學(xué)習(xí)的邊緣檢測(cè)
OpenCV在其全新的DNN模塊中集成了基于深度學(xué)習(xí)的邊緣檢測(cè)技術(shù)。你需要OpenCV 3.4.3或更高版本。這種技術(shù)被稱為整體嵌套邊緣檢測(cè)或HED,是一種基于學(xué)習(xí)的端到端邊緣檢測(cè)系統(tǒng),使用修剪過(guò)的類似vgg的卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行圖像到圖像的預(yù)測(cè)任務(wù)。
HED利用了中間層的輸出。之前的層的輸出稱為side output,將所有5個(gè)卷積層的輸出進(jìn)行融合,生成最終的預(yù)測(cè)。由于在每一層生成的特征圖大小不同,它可以有效地以不同的尺度查看圖像。
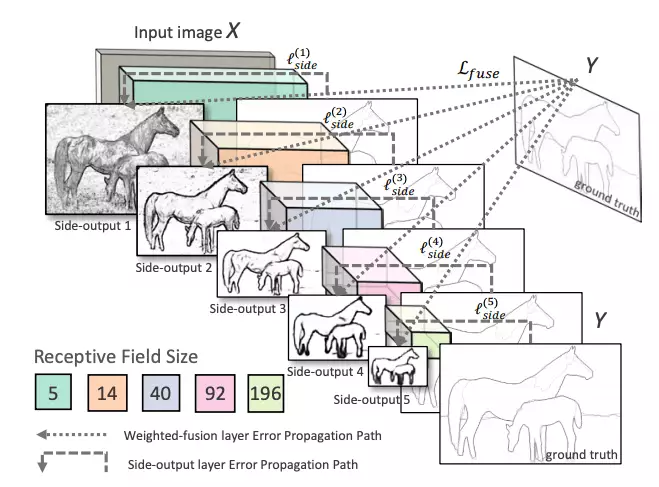
網(wǎng)絡(luò)結(jié)構(gòu):整體嵌套邊緣檢測(cè)
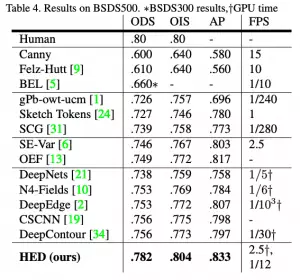
HED方法不僅比其他基于深度學(xué)習(xí)的方法更準(zhǔn)確,而且速度也比其他方法快得多。這就是為什么OpenCV決定將其集成到新的DNN模塊中。以下是這篇論文的結(jié)果:
在OpenCV中訓(xùn)練深度學(xué)習(xí)邊緣檢測(cè)的代碼
OpenCV使用的預(yù)訓(xùn)練模型已經(jīng)在Caffe框架中訓(xùn)練過(guò)了,可以這樣加載:
shdownload_pretrained.sh
網(wǎng)絡(luò)中有一個(gè)crop層,默認(rèn)是沒(méi)有實(shí)現(xiàn)的,所以我們需要自己實(shí)現(xiàn)一下。
classCropLayer(object): def__init__(self,params,blobs): self.xstart=0 self.xend=0 self.ystart=0 self.yend=0 #Ourlayerreceivestwoinputs.Weneedtocropthefirstinputblob #tomatchashapeofthesecondone(keepingbatchsizeandnumberofchannels) defgetMemoryShapes(self,inputs): inputShape,targetShape=inputs[0],inputs[1] batchSize,numChannels=inputShape[0],inputShape[1] height,width=targetShape[2],targetShape[3] self.ystart=(inputShape[2]-targetShape[2])//2 self.xstart=(inputShape[3]-targetShape[3])//2 self.yend=self.ystart+height self.xend=self.xstart+width return[[batchSize,numChannels,height,width]] defforward(self,inputs): return[inputs[0][:,:,self.ystart:self.yend,self.xstart:self.xend]]
現(xiàn)在,我們可以重載這個(gè)類,只需用一行代碼注冊(cè)該層。
cv.dnn_registerLayer('Crop',CropLayer)
現(xiàn)在,我們準(zhǔn)備構(gòu)建網(wǎng)絡(luò)圖并加載權(quán)重,這可以通過(guò)OpenCV的dnn.readNe函數(shù)。
net=cv.dnn.readNet(args.prototxt,args.caffemodel)
現(xiàn)在,下一步是批量加載圖像,并通過(guò)網(wǎng)絡(luò)運(yùn)行它們。為此,我們使用cv2.dnn.blobFromImage方法。該方法從輸入圖像中創(chuàng)建四維blob。
blob=cv.dnn.blobFromImage(image,scalefactor,size,mean,swapRB,crop)
其中:
image:是我們想要發(fā)送給神經(jīng)網(wǎng)絡(luò)進(jìn)行推理的輸入圖像。
scalefactor:圖像縮放常數(shù),很多時(shí)候我們需要把uint8的圖像除以255,這樣所有的像素都在0到1之間。默認(rèn)值是1.0,不縮放。
size:輸出圖像的空間大小。它將等于后續(xù)神經(jīng)網(wǎng)絡(luò)作為blobFromImage輸出所需的輸入大小。
swapRB:布爾值,表示我們是否想在3通道圖像中交換第一個(gè)和最后一個(gè)通道。OpenCV默認(rèn)圖像為BGR格式,但如果我們想將此順序轉(zhuǎn)換為RGB,我們可以將此標(biāo)志設(shè)置為T(mén)rue,這也是默認(rèn)值。
mean:為了進(jìn)行歸一化,有時(shí)我們計(jì)算訓(xùn)練數(shù)據(jù)集上的平均像素值,并在訓(xùn)練過(guò)程中從每幅圖像中減去它。如果我們?cè)谟?xùn)練中做均值減法,那么我們必須在推理中應(yīng)用它。這個(gè)平均值是一個(gè)對(duì)應(yīng)于R, G, B通道的元組。例如Imagenet數(shù)據(jù)集的均值是R=103.93, G=116.77, B=123.68。如果我們使用swapRB=False,那么這個(gè)順序?qū)⑹?B, G, R)。
crop:布爾標(biāo)志,表示我們是否想居中裁剪圖像。如果設(shè)置為T(mén)rue,則從中心裁剪輸入圖像時(shí),較小的尺寸等于相應(yīng)的尺寸,而其他尺寸等于或大于該尺寸。然而,如果我們將其設(shè)置為False,它將保留長(zhǎng)寬比,只是將其調(diào)整為固定尺寸大小。
在我們這個(gè)場(chǎng)景下:
inp=cv.dnn.blobFromImage(frame,scalefactor=1.0,size=(args.width,args.height), mean=(104.00698793,116.66876762,122.67891434),swapRB=False, crop=False)
現(xiàn)在,我們只需要調(diào)用一下前向方法。
net.setInput(inp) out=net.forward() out=out[0,0] out=cv.resize(out,(frame.shape[1],frame.shape[0])) out=255*out out=out.astype(np.uint8) out=cv.cvtColor(out,cv.COLOR_GRAY2BGR) con=np.concatenate((frame,out),axis=1) cv.imshow(kWinName,con)
結(jié)果:

中間的圖像是人工標(biāo)注的圖像,右邊是HED的結(jié)果

中間的圖像是人工標(biāo)注的圖像,右邊是HED的結(jié)果
文中的代碼:https://github.com/sankit1/cv-tricks.com/tree/master/OpenCV/Edge_detection
英文原文:https://cv-tricks.com/opencv-dnn/edge-detection-hed/
責(zé)任編輯:lq
-
邊緣檢測(cè)
+關(guān)注
關(guān)注
0文章
92瀏覽量
18216 -
OpenCV
+關(guān)注
關(guān)注
31文章
635瀏覽量
41373 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5504瀏覽量
121221
原文標(biāo)題:基于OpenCV深度學(xué)習(xí)的邊緣檢測(cè)
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
AI模型部署邊緣設(shè)備的奇妙之旅:目標(biāo)檢測(cè)模型
AI模型部署邊緣設(shè)備的奇妙之旅:如何在邊緣端部署OpenCV
AI模型部署邊緣設(shè)備的奇妙之旅:如何在邊緣端部署OpenCV

如何用OpenCV的相機(jī)捕捉視頻進(jìn)行人臉檢測(cè)--基于米爾NXP i.MX93開(kāi)發(fā)板
如何在智能手機(jī)系統(tǒng)中使用bq27505

FPGA做深度學(xué)習(xí)能走多遠(yuǎn)?
如何在汽車CAN應(yīng)用中使用負(fù)邊緣觸發(fā)觸發(fā)器節(jié)省電力
opencv圖像識(shí)別有什么算法
opencv的主要功能有哪些
基于AI深度學(xué)習(xí)的缺陷檢測(cè)系統(tǒng)
基于深度學(xué)習(xí)的小目標(biāo)檢測(cè)
嵌入式學(xué)習(xí)-飛凌ElfBoard ELF 1板卡 - 如何在Ubuntu中編譯OpenCV庫(kù)
ELF 1技術(shù)貼|如何在Ubuntu中編譯OpenCV庫(kù)
深度學(xué)習(xí)檢測(cè)小目標(biāo)常用方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論