

TI為機器視覺攝影鏡頭提供了一些非常不錯的參考設計。TI為3D機器視覺提供的一種獨特的解決方案,利用了其數(shù)字光源處理器(DLP)技術。透過圖5中的例子可以看到,如何可在3D機器視覺應用中利用DLP。
圖5 針對3D機器視覺的DLP解決方案。
除硬件外,TI還提供DLP結構光軟件開發(fā)工具包(SDK),以及基于其TIDA-00254的3D機器視覺完整參考設計。
ADI選擇為條形碼掃描儀開發(fā)解決方案。機器視覺系統(tǒng)設計因為需要辨識和讀取大量的各類標簽,而無論其大小、形狀、顏色或條件如何,所以需要使用這類基于影像的系統(tǒng)。該公司認為條形碼掃描儀市場目前正在從基于雷射的系統(tǒng)轉向成像解決方案,從而獲得更高的掃描分辨率、吞吐量和專一性。為此,嵌入式處理器需要進行邊緣檢測與分類,腐蝕、膨脹、復位位和感興趣區(qū)域選擇,以及掃描算法包含顏色和模板匹配部分。
在機器視覺攝影鏡頭領域,要求攝影鏡頭本身就能實時檢測缺陷或異常,Blackfin DSP的分析處理功能可以提高效率,并提供更具成本效益的線掃描和故障檢測解決方案。
ADI還推出了一款六足蜘蛛機器人,它可以部署在對人類來說過于危險的惡劣環(huán)境中,例如地震或其他自然災害地區(qū)。
協(xié)作型機器人
機器人將在智慧工廠和太空中與人類一起工作,這類協(xié)作型機器人被稱為cobot(collaborative robot的簡稱)。計算機視覺和影像辨識的新技術進步,將幫助這些cobot避免與其人類同事相接觸。VEO Robotics是一家為工業(yè)cobot開發(fā)感知和智慧方案的公司典范。
NASA自動漫游車的機器視覺
現(xiàn)在我們來看看NASA用于自動漫游車的機器視覺技術。最新的火星漫游車是Mars 2020 Rover,它有一個非常獨特的”SuperCam”—不像大多數(shù)其他機器視覺攝影鏡頭那樣看影像,而是使用紅外線和綠色激光束來遠程分析土壤和巖石等材料的化學成分。使用的技術是雷射誘導擊穿光譜法(LIBS),利用漫游車上的遠程RAMAN光譜系統(tǒng)進行礦物分析(圖6)。欲了解更多信息,可參閱《”SuperCam” Update: Multi-purpose Instrument Coming Together for 2020 Launch to Mars》一文。
圖6 Mars 2020 Rover使用SuperCam。
使用機器人視覺的創(chuàng)新和教育應用
6自由度機械手
人工智能正在成功地應用于計算機視覺系統(tǒng),特別是機器人視覺(robotic vision)。計算機視覺可以獲取、分析、處理和理解影像,《Computer Vision Based Object Grasping 6DoF RoboticArm Using Picamera》一文中提供了基本的機械手臂設計,它可以在特定位置執(zhí)行起吊、運輸和卸放物體等多種任務。這個機械手臂與基于攝影鏡頭的3D視覺系統(tǒng)相配合—該系統(tǒng)連接到一臺具有視覺算法功能的計算機,能夠辨識物體的變形,以及空間協(xié)調,從而使機械手臂能夠遵循特定程序來完成其任務。
這種機器人設計使用了Picamera—這是一款官方的Raspberry Pi產品,能夠拍攝照片、錄制視訊,并可將所用影像特效用作輸入(圖7)。
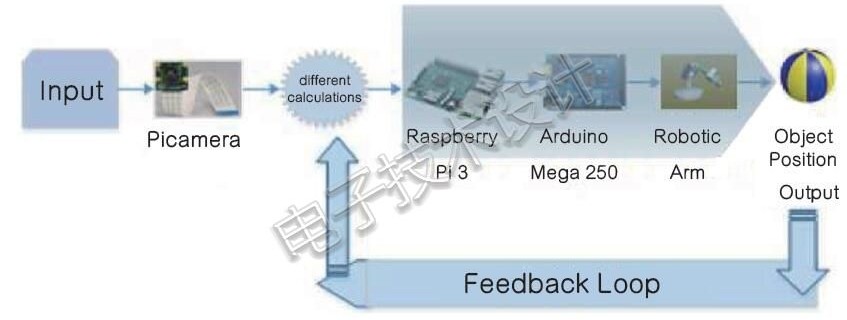
圖7 系統(tǒng)框圖。
計算機視覺算法
這個系統(tǒng)設計使用了兩種算法:算法1用于辨識紅色物體,而算法2可在將物體位置與機械手臂手爪位置進行比較時,與機械手臂一起辨識物體位置。
這是初學者學習機器視覺或計算機視覺和機器人技術的一個相對基礎的例子。這個示例利用將機械手臂的所有軸聚焦到所需對象來執(zhí)行一些不同的基本功能,并可在所需位置對其卸放。
配備機械手臂的輪椅
這個例子比前一個例子復雜一點。該設計將幫助有醫(yī)療運動障礙的患者執(zhí)行日常任務。由于患有上肢肢體疾病(如帕金森氏癥)的患者手動控制機械手臂會比較困難,因此這種設計可以使他們受益,將使用計算機視覺的自主手臂安裝在輪椅上是基本的思路。
機械手臂具有6自由度,并結合計算機系統(tǒng)和兩個視覺傳感器安裝在電動輪椅上。一個傳感器使用計算機視覺算法,檢測架子上隨機所放有色物體的粗略位置;第二個傳感器透過確保物體準確放在手爪前以提供物體的精確位置。手臂將自動抓取有色物體,并將其交給使用者(圖8)。
圖8 安裝在電動輪椅上的機械手臂。
這種機械手臂是由Trossen Robotics開發(fā)的PhantomX Reactor機械手臂套件。它使用的Arbotix-M機器人控制器是由Trossen自行開發(fā)—這款微控制器與Arduino兼容。為了透過計算機與手臂通信,設計人員使用了python串口訪問庫PySerial。
視覺傳感器
兩個USB網(wǎng)絡攝影鏡頭視覺傳感器用于物體檢測。視覺傳感器1是羅技HD c920網(wǎng)絡攝影鏡頭,安裝在面向架子的機械手臂上方,這樣可以擷取手臂和架子的視訊以便進行實時的粗略定位,利用對視訊訊框進行處理即可定位目標對象的X和Y位置。視覺傳感器2是一個機器人VGA網(wǎng)絡攝影鏡頭,使用200mm鵝頸管安裝在手爪上方,這一視覺傳感器用來擷取目標物體的近距離特寫視訊。計算機視覺算法負責尋找并抓住對象物體,并將其拿到使用者面前,交給使用者。
Cartman
澳大利亞機器人視覺中心(ACRV)團隊成功設計了一款用于自動倉儲的取放機器人Cartman,而贏得了2018年亞馬遜機器人挑戰(zhàn)賽(Amazon Robotics Challenge)冠軍。
對于機器人來說,從雜亂的隨機物體堆中選擇一件特定物體是比較困難的事。這個項目則更加先進,可以用于家庭清潔,或先進的空間相關樣品退還任務,圖9顯示了Cartman的組成部分。
圖9 Cartman設計有兩個6自由度機械手臂。其手腕上安裝有一個攝影鏡頭,以及兩個效應器工具(抽吸工具和平行夾持機構),框架上安裝了第二個攝影鏡頭,對紅色背景幕布區(qū)域的物品拾取進行二次拍攝。
攝影鏡頭
由于要安裝在機器人的手腕上,英特爾RealSense SR300 RGB-D攝影鏡頭因其體積小和重量輕等優(yōu)點而被選中。這款攝影鏡頭使用攝影鏡頭中的紅外線投影儀來確定深度;另一個RealSense攝影鏡頭安裝在機器人的框架上,用于對所拾取的物品進行第二次分類檢查。
這次比賽中一個有趣的挑戰(zhàn)是,機器人要拾取的物品僅在每次競賽開始前45分鐘才提供給參賽團隊。這為深度學習帶來了挑戰(zhàn)。這個獲獎團隊選擇在一組最小的未見物品數(shù)據(jù)上微調其基礎RefineNet網(wǎng)絡,該團隊開發(fā)了一個半自動數(shù)據(jù)收集流程,而使他們能夠收集到每個未見物品七個獨特姿勢的影像數(shù)據(jù),并創(chuàng)建帶標記的數(shù)據(jù)集,從而在7分鐘內對網(wǎng)絡進行微調。在比賽期間,微調是在Intel Core i5-7600計算機和四片Nvidia GTX1080Ti顯卡上進行。
從挑戰(zhàn)賽可以看出,該團隊意識到,機器人系統(tǒng)的性能仍然有很長的路要走,才能達到人類的水平(人類可以做到大約400次拾取/小時,而Cartman只能執(zhí)行大約120次/小時)。他們認為以下兩個特性對于贏得挑戰(zhàn)比賽至關重要,對設計能夠在現(xiàn)實世界中使用的自動機器人系統(tǒng)同樣重要:
?采用專注于系統(tǒng)級整合和測試的設計方法,可以幫助優(yōu)化競賽表現(xiàn);
?需要設計強健且能處理錯誤的高階邏輯。
機器視覺在紡織檢驗中的挑戰(zhàn)
Teledyne Dalsa擁有不錯的區(qū)域掃描、線掃描、TDI線掃描、智能和紅外線攝影鏡頭系列。他們已經(jīng)接受了在要求苛刻的紡織產業(yè)中使用機器視覺的挑戰(zhàn),即要求成品不能有結構性和表面缺陷,這是一項艱巨而復雜的任務。
機器視覺主要用于惡劣工業(yè)環(huán)境中的工業(yè)攝影鏡頭。在紡織產業(yè),生產線可能每天24小時運作,材料又可能在這樣的生產在線以高達120公尺/分鐘的速度移動,同時要求保持產品有高度的一致性和質量,這樣才能提高效率和利潤。
這種工作中所采用的攝影鏡頭通常是線掃描攝影鏡頭,其單行畫素可用于對快速移動材料創(chuàng)建連續(xù)的2D影像。這些攝影鏡頭特別適用于連續(xù)布料成像,同時可以檢測出圖案、顏色和紋理的變化,以及材料中的缺陷。與面掃描攝影鏡頭相比,這類攝影鏡頭在提供高速無污漬影像方面表現(xiàn)出色,具有很好的處理效率和更低的每畫素成本。
較新的多線掃描攝影鏡頭與不同的LED光源相結合,可以檢測沿生產線快速移動的紡織品在整個長度和寬度上的一系列缺陷,整個視場角范圍內的照明應該是均勻并且具高密度。
《A New Look: How Machine Vision Is Changing Textile Inspection》一文中指出,”線掃描攝影鏡頭產生的數(shù)據(jù)通常用于創(chuàng)建2D影像,或自動創(chuàng)建一張圖,用來準確顯示缺陷位于紡織品表面的位置,質量控制檢驗員可以查看這張缺陷圖來確定其有效性。質量控制檢驗員所尋找的一些典型缺陷包括水損壞、印刷錯誤、異物纖維、油斑等,然后,圖像處理軟件對影像或缺陷圖進行分析,來對所檢測紡織品構建虛擬切割方案。這個過程可使制造商在實際切割紡織品之前虛擬地構建一個切割方案,從而能夠以最小的缺陷達到最大產量。一旦生成了理想的切割方案之后,制造商就可以據(jù)此實施,并準備紡織品的出貨了。”
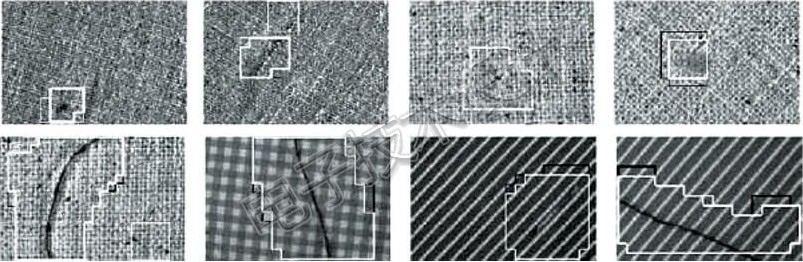
圖10 檢測結構性缺陷。
機器人正與人們一起工作,它們可以看到許多人類無法看到的東西,處理大量數(shù)據(jù)的速度要比人類大腦快幾個數(shù)量級。他們有眼睛、耳朵、語音,以及嗅覺和感覺能力,可以走路、交談、抓取,并執(zhí)行復雜的功能。我們正在進入人工智能的時代,這是機器人推理的開始,但我們是這項技術的創(chuàng)造者和主人,有責任確保創(chuàng)造用于正當目的,同時需要重新培訓可能因先進技術而失去工作的人。技術是好的,但作為技術的監(jiān)護者,必須保持它們在社會中的地位,同時確保為每個人創(chuàng)造更美好和更成功的世界。
責任編輯:pj
-
處理器
+關注
關注
68文章
19706瀏覽量
232708 -
機器人
+關注
關注
212文章
29240瀏覽量
210775 -
3D
+關注
關注
9文章
2937瀏覽量
109105 -
機器視覺
+關注
關注
163文章
4484瀏覽量
121776
發(fā)布評論請先 登錄
相關推薦
關于3D DLP技術的技術解答
DLP160CP DMD是否可以應用于機器視覺應用?
采用DLP結構光的3D機器視覺參考設計包括BOM及框圖
面向3D機器視覺應用并采用DLP技術的精確點云生成參考設計

面向3D機器視覺應用并采用DLP技術的精確點云生成

為什么要選擇3D機器視覺檢測
適用于3D機器視覺的高度可擴展的TI DLP技術





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論