 來自德國LOLA的人形機器人
來自德國LOLA的人形機器人
近幾年,科技界迎來了機器人的大發展,工業機器人咱們暫且不論,在類人機器人的發展歷史中,我們之前相繼介紹過多款了。
比如最早的是日本本田已經終止開發的人形機器人ASIMO:
技能和動作水平最高的美國波士頓動力公司的機器人Atlas:
鐵了心送快遞的美國大長腿機器人Agility Robotics對(升級版的Cassie):

還有前段時間咱們剛介紹過的韓國的LIMS2仿人雙臂機器人:
今天咱們介紹一下來自德國LOLA的人形機器人。
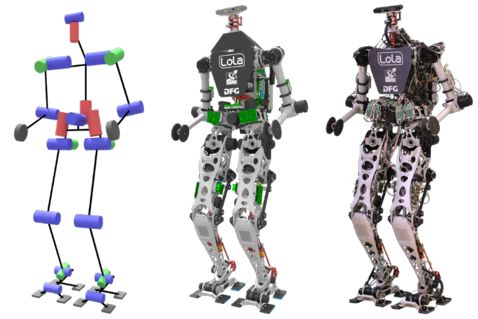
LOLA的人形機器人是慕尼黑工業大學機械工程系正在研究構造的一種能夠快速、類似人類自主行走的機器人,他們通過改進視覺感知和步行控制的整合來解決機器人的自主性問題。
LOLA機器人研究的重點是機器人不依賴于人類感知和決策能力的自主性。研究內容包括動力學,實時運動規劃控制以及此類系統的設計。
LOLA的基本信息:
身高:180厘米
體重:68kg
速度:5公里/小時
硬件:26個電動關節,由無刷直流電動機驅動。
LOLA機器人的腿部設計非常精妙,自由度分別分布在:腿6個自由度,髖關節3,膝蓋1,踝關節2。其中,膝關節采用電機+滾珠絲杠傳動,踝關節采用電機+同步帶+錐齒輪+滾珠絲杠+連桿傳動。這兩個主要關節的所有驅動均布置于大腿內部,質心高,慣量低,從而為站立和行走時的穩定性提供了物理基礎。
之后研發人員對LOLA的上身增加兩個附加關節,即別名“手臂旋轉”,這大大增加了可到達的任務空間。
近日,LOLA雙足步行機器人又進行了一次重大升級,實現了依靠上肢輔助的多觸點移動(multi-contact locomotion)。直觀地說,就是機器人學會扶墻了: 研究團隊表示,這項技術仍處于早期階段,但它為LOLA帶來了迄今為止機器人中最人性化的雙足運動。 在軟件方面,機器人采用了層次性架構。 在最高層次上,視覺系統先生成一個環境模型,并估計場景中機器人的6D姿態。然后,行走模式生成器使用這些信息來規劃一個動態模型,引導LOLA到預定的目標位置。 在較低層次上,穩定模塊來進一步完善這個環節,以補償模型或其他因素產生的誤差,并保持整體的平衡。
研究人員表示,使用LOLA進行研究的主要目標之一是在復雜,崎嶇不平的地形上保持快速自主的運動,最終達到與人類相似的步行速度。
研發團隊希望通過這項研究,一方面能為直立行走的控制機制提供新思路,另一方面能證明目前對人類步態的生物力學模型的理解是否正確。 當前,LOLA可以以1.8 km/h的速度進行多點接觸運動并穿越不平坦的地形,這對于兩足動物而言相對較快,但對人類而言仍然較慢。 平坦的地面上,LOLA的硬件使其能夠以相對較高的3.38 km /h的最高速度行走。 在LOLA 變得越來越像人的同時,研究人員也在探索雙足機器人如何利用它們的四肢以非人類的方式移動。用LOLA進行的這次研究就是朝更多可能性邁出的一步。
責任編輯:lq
-
生成器
+關注
關注
7文章
315瀏覽量
21002 -
無刷直流電動機
+關注
關注
1文章
53瀏覽量
13926 -
人形機器人
+關注
關注
2文章
443瀏覽量
16549
原文標題:【本潤諧波 | 技術】德國人形機器人來了
文章出處:【微信號:gaogongrobot,微信公眾號:高工機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Atlas轉型電驅,純電+AI正在加速通用人形機器人落地

全球巨頭加速布局人形機器人賽道
《人形機器人產業地圖(2024)》重磅發布!

日本推出革命性的人形機器人

從市場角度簡要解讀“人形機器人”
從市場角度簡要解讀“人形機器人”

為何要做人形機器人?
華為云在人形機器人領域展開合作
英偉達發布人形機器人基礎模型
海爾與樂聚聯手推出人形機器人“夸父”
人形機器人成為車圈“新寵”?

全球首款具有仿人脊柱核心功能的人形機器人來了!
?大象機器人首發萬元級水星Mercury人形機器人系列






 工商網監
工商網監
評論