") 揭秘最近很火的自動(dòng)駕駛之“眼”
揭秘最近很火的自動(dòng)駕駛之“眼”
要實(shí)現(xiàn)SAE L4/L5的全自動(dòng)駕駛功能,就需要應(yīng)用多種傳感器冗余系統(tǒng)。攝像頭、雷達(dá)和激光雷達(dá)這三大傳感器系統(tǒng)基本是缺一不可。
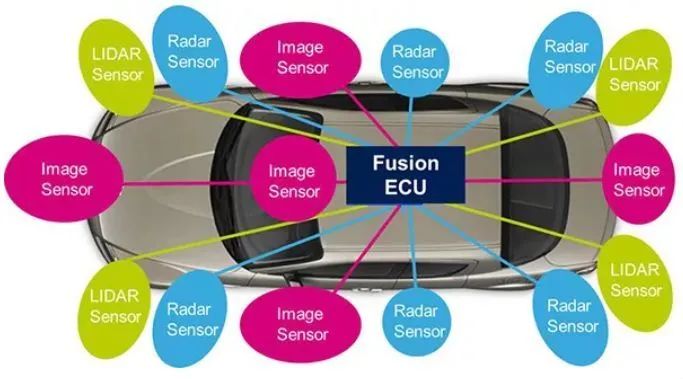
目前,超聲波雷達(dá)、毫米波雷達(dá)和多攝像頭系統(tǒng)已經(jīng)在高端汽車上應(yīng)用,隨著智能駕駛發(fā)展勢(shì)如破竹,環(huán)境感知技術(shù)將快速發(fā)展,進(jìn)一步發(fā)揮協(xié)同作用。雖然傳感器僅僅是自動(dòng)駕駛汽車的一部分,但是市場(chǎng)前景十分廣闊。
01. 車載攝像頭
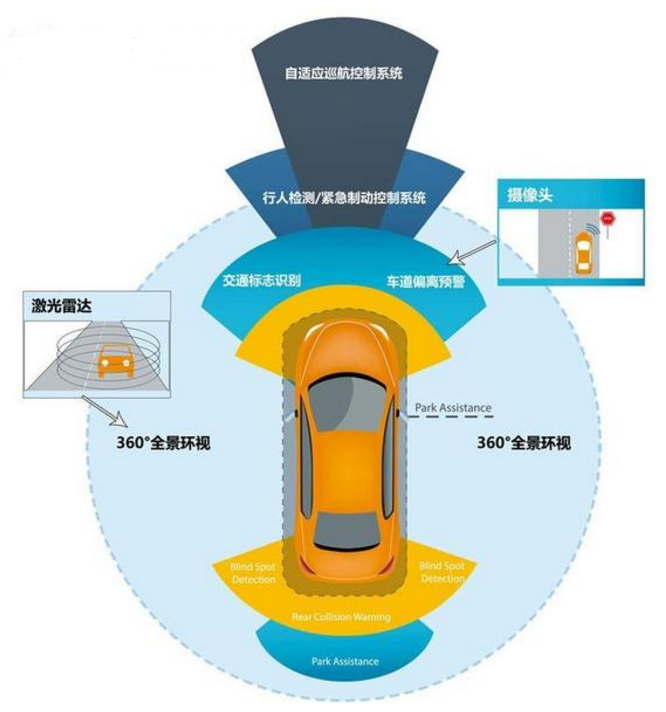
車載攝像頭是實(shí)現(xiàn)眾多預(yù)警、識(shí)別類ADAS功能的基礎(chǔ)。在眾多ADAS功能中,視覺影像處理系統(tǒng)較為基礎(chǔ),對(duì)于駕駛者也更為直觀,而攝像頭又是視覺影像處理系統(tǒng)的基礎(chǔ),因此車載攝像頭對(duì)于智能駕駛必不可少。
車道偏離預(yù)警(LDW)、前向碰撞預(yù)警(FCW)、交通標(biāo)志識(shí)別(TSR)、 車道保持輔助(LKA)、行人碰撞預(yù)警(PCW)、全景泊車(SVP)、駕駛員疲勞預(yù)警等眾多功能都可借助攝像頭實(shí)現(xiàn),有的功能甚至只能通過攝像頭實(shí)現(xiàn)。
車載攝像頭價(jià)格持續(xù)走低,未來單車多攝像頭將成為趨勢(shì)。相對(duì)于車載雷達(dá)等傳感器價(jià)格更加低廉,易于普及應(yīng)用。特斯拉Autopilot 2.0的硬件系統(tǒng)中就包含8個(gè)攝像頭,未來單車多攝像頭將成為趨勢(shì)。
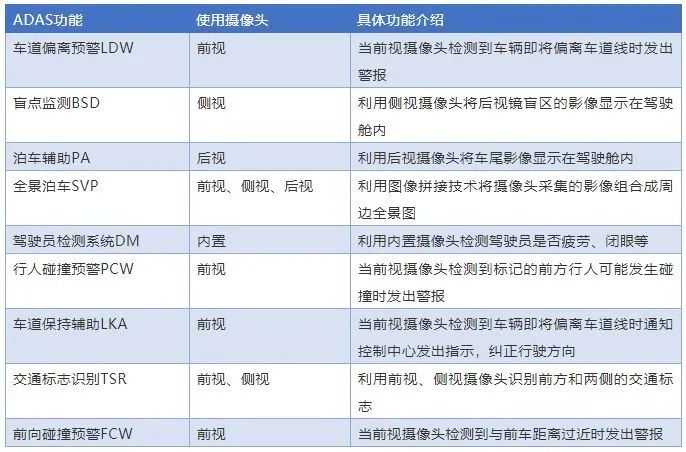
根據(jù)不同ADAS功能的要求,攝像頭的安裝位置也不盡相同。按攝像頭的安裝位置不同,可分為前視、側(cè)視、后視和內(nèi)置四個(gè)部分。未來要實(shí)現(xiàn)全套ADAS功能,單車需配備至少5個(gè)攝像頭。
前視攝像頭使用頻率最高,單一攝像頭可實(shí)現(xiàn)多重功能。通過算法開發(fā)優(yōu)化,單一前視攝像頭可以實(shí)現(xiàn)多重功能,如行車記錄、車道偏離預(yù)警、前向碰撞預(yù)警、行人識(shí)別等。未來也有望通過算法整合,實(shí)現(xiàn)更多ADAS功能。
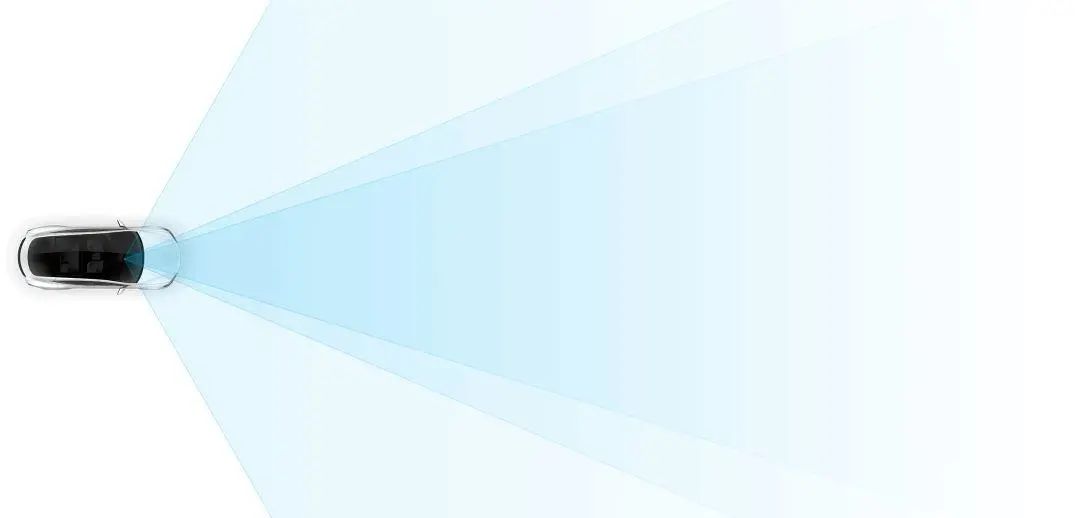
前視攝像頭一般為廣角鏡頭,安裝在車內(nèi)后視鏡上或者前擋風(fēng)玻璃上較高的位置,以實(shí)現(xiàn)較遠(yuǎn)的有效距離。
側(cè)視攝像頭代替后視鏡將成為趨勢(shì)。由于后視鏡的范圍有限,當(dāng)另一輛在斜后方的車位于這個(gè)范圍之外就“隱身”,這個(gè)范圍之外的部分就叫做盲區(qū)。因?yàn)槊^(qū)的存在,大大增加了交通事故發(fā)生的幾率。而在車輛兩側(cè)加裝側(cè)視攝像頭可以基本覆蓋盲區(qū),當(dāng)有車輛進(jìn)入盲區(qū)時(shí),就有自動(dòng)提醒駕駛員注意,這就是盲區(qū)監(jiān)測(cè)系統(tǒng)。
目前還出現(xiàn)了新的潮流,那就是使用側(cè)視廣角攝像頭取代后視鏡,這樣既能降低風(fēng)阻,同時(shí)又可以獲得更大更廣的視角,避免在危險(xiǎn)的盲區(qū)發(fā)生意外。
特斯拉攝像頭布局

前向三顆攝像頭(擋風(fēng)玻璃后):前向窄視場(chǎng)角(1.5英寸到邊),最大距離820英尺(約250米),35度視場(chǎng)角;前向主攝像頭(1.5英寸到邊),最大距離260英尺(80米),50度視場(chǎng)角;前向魚眼攝像頭(位于中間),最大距離195英尺(60米),150度視場(chǎng)角。
左B柱攝像頭,195英尺(60米),80度視場(chǎng)角;右B柱,195英尺(60米),80度視場(chǎng)角;

左視鏡下方翼子板位置后視攝像頭,325英尺(100米),60度視場(chǎng)角;右視鏡下方翼子板位置后視攝像頭(100米),325英尺,60度視場(chǎng)
后視攝像頭最大距離160英尺(約50米),140度視場(chǎng)角;

另外,在Model 3上還有一顆座艙內(nèi)的監(jiān)控?cái)z像頭。
02.雷達(dá)
雷達(dá),測(cè)距測(cè)速必不可少的傳感器。
雷達(dá)通過發(fā)射聲波或者電磁波對(duì)目標(biāo)物體進(jìn)行照射并接收其回波,由此獲得目標(biāo)物體的距離、距離變化率(徑向速度)、大小、方位等信息。雷達(dá)最先應(yīng)用于軍事中,后來逐漸民用化。
隨著汽車智能化的發(fā)展趨勢(shì),雷達(dá)開始出現(xiàn)在汽車上,主要用于測(cè)距、測(cè)速等功能。汽車?yán)走_(dá)可分為超聲波雷達(dá)、毫米波雷達(dá)、激光雷達(dá)等,不同雷達(dá)的原理不盡相同,性能特點(diǎn)也各有優(yōu)勢(shì),可用于實(shí)現(xiàn)不同的功能。
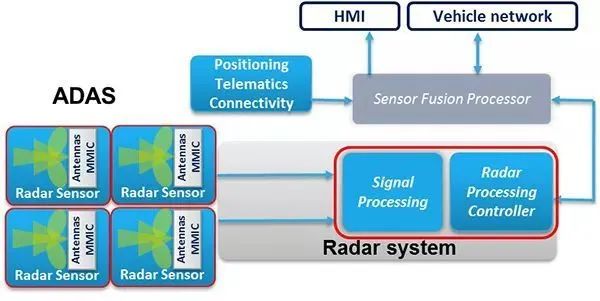
雷達(dá)傳感器(僅進(jìn)行原始數(shù)據(jù)收集)的基本架構(gòu)
超聲波雷達(dá)
超聲波雷達(dá)是利用傳感器內(nèi)的超聲波發(fā)生器產(chǎn)生40KHz的超聲波,再由接收探頭接收經(jīng)障礙物反射回來的超聲波,根據(jù)超聲波反射接收的時(shí)間差計(jì)算與障礙物之間的距離。超聲波雷達(dá)成本較低,探測(cè)距離近精度高,且不受光線條件的影響,因此常用于泊車系統(tǒng)中。
毫米波雷達(dá):ADAS核心傳感器
毫米波是指波長(zhǎng)在1mm到10mm之間的電磁波,換算成頻率后,毫米波的頻率位于30GHz到300GHz之間。毫米波的波長(zhǎng)介于厘米波和光波之間,因此毫米波兼有微波制導(dǎo)和光電制導(dǎo)的優(yōu)點(diǎn)。
毫米波雷達(dá)在導(dǎo)彈制導(dǎo)、目標(biāo)監(jiān)視和截獲、炮火控制和跟蹤、高速通信、衛(wèi)星遙感等領(lǐng)域都有廣泛的應(yīng)用。近些年,隨著毫米波雷達(dá)技術(shù)水平的提升和成本的下降,毫米波雷達(dá)開始應(yīng)用于汽車領(lǐng)域。
毫米波雷達(dá)關(guān)鍵技術(shù)主要由國(guó)外電子公司掌控。毫米波雷達(dá)系統(tǒng)主要包括天線、收發(fā)模塊、信號(hào)處理模塊,而MMIC芯片和天線PCB板(PrintedCircuitBoard)是毫米波雷達(dá)的硬件核心。
目前毫米波雷達(dá)關(guān)鍵技術(shù)主要被Bosch、Continental、Denso、Autoliv等零部件巨頭壟斷,特別是77GHz產(chǎn)品技術(shù)只有Bosch、Continental、Denso、Delphi等少數(shù)幾家公司掌握。
激光雷達(dá)
激光雷達(dá),功能強(qiáng)大成本大幅降低可期。
激光雷達(dá)是軍轉(zhuǎn)民的高精度雷達(dá)技術(shù)。激光雷達(dá)的應(yīng)用一開始主要為軍事領(lǐng)域,受到了各國(guó)軍事部門的極大關(guān)注。相比普通雷達(dá),激光雷達(dá)可提供高分辨率的輻射強(qiáng)度幾何圖像、距離圖像、速度圖像。在民用領(lǐng)域中,激光雷達(dá)因其在測(cè)距測(cè)速、三維建模等領(lǐng)域的優(yōu)越性能也被廣泛應(yīng)用。
激光雷達(dá)性能精良,是無人駕駛的最佳技術(shù)路線。激光雷達(dá)相對(duì)于其他自動(dòng)駕駛傳感器具有非常優(yōu)越的性能:
1)分辨率高。激光雷達(dá)可以獲得極高的角度、距離和速度分辨率。通常激光雷達(dá)的角分辨率不低于0.1mard也就是說可以分辨3km距離上相距0.3m的兩個(gè)目標(biāo),并可同時(shí)跟蹤多個(gè)目標(biāo);距離分辨率可達(dá)0.1m;速度分辨率能達(dá)到10m/s以內(nèi)。如此高的距離、速度分辨率意味著激光雷達(dá)可以利用多普勒成像技術(shù)獲得非常清晰的圖像。
2)精度高。激光直線傳播、方向性好、光束非常窄,彌散性非常低,因此激光雷達(dá)的精度很高。
3)抗有源干擾能力強(qiáng)。與微波、毫米波雷達(dá)易受自然界廣泛存在的電磁波影響的情況不同,自然界中能對(duì)激光雷達(dá)起干擾作用的信號(hào)源不多,因此激光雷達(dá)抗有源干擾的能力很強(qiáng)。
激光雷達(dá)可以分為一維激光雷達(dá)、二維激光雷達(dá)、三維激光掃描儀、三維激光雷達(dá)等。其中一維激光雷達(dá)主要用于測(cè)距測(cè)速等,二維激光雷達(dá)主要用于輪廓測(cè)量、物體識(shí)別、區(qū)域監(jiān)控等,三維激光雷達(dá)可以實(shí)現(xiàn)實(shí)時(shí)三維空間建模。
車載三維激光雷達(dá)一般安裝在車頂,可以高速旋轉(zhuǎn),以獲得周圍空間的點(diǎn)云數(shù)據(jù),從而實(shí)時(shí)繪制出車輛周邊的三維空間地圖;同時(shí),激光雷達(dá)還可以測(cè)量出周邊其他車輛在三個(gè)方向上的距離、速度、加速度、角速度等信息,再結(jié)合GPS地圖計(jì)算出車輛的位置,這些龐大豐富的數(shù)據(jù)信息傳輸給ECU分析處理后,以供車輛快速做出判斷。
編輯:jq
-
無人駕駛
+關(guān)注
關(guān)注
98文章
4108瀏覽量
121614 -
車載攝像頭
+關(guān)注
關(guān)注
5文章
138瀏覽量
28202 -
雷達(dá)傳感器
+關(guān)注
關(guān)注
3文章
294瀏覽量
34642
原文標(biāo)題:一文了解最近很火的自動(dòng)駕駛之“眼”
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

自動(dòng)駕駛汽車安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL
自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)涉及到哪些技術(shù)

自動(dòng)駕駛HiL測(cè)試方案——攝像頭仿真之視頻注入#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案 ——場(chǎng)景仿真3D演示#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論