 純電動汽車兩擋變速器換擋策略
純電動汽車兩擋變速器換擋策略
作者:孔令靜,梁長飛,林新峰,盛亞楠,從宏超
0 引言
傳統內燃機汽車采用多擋位變速器;小型純電動汽車與之不同,目前多采用固定速比的減速器,電機輸出軸與減速器輸入軸之間通過聯軸器直接連接,沒有使用離合器,利用電機調速來實現車速的改變。這種傳動方式結構簡單,制造成本低,但對牽引電機提出了更高要求,既要求其在恒轉矩區提供較高的瞬時轉矩,又要在恒功率區提供較高的運行轉速,滿足車輛的加速性能和最高車速設計要求。為了使電動汽車能更好地滿足其動力性能和經濟性能,同時降低對牽引電機和電池的要求,電動汽車傳動系統的發展或趨于兩擋或多擋化。
本文依托某純電動緊湊型轎車,由VCU完成兩擋變速器換擋中的轉速同步策略實施,TCU和MCU密切協作,完成換擋動作。以整車動力性、經濟性和平順性等為導向進行了換擋策略定義,通過PI控制電機扭矩快速調節電機轉速與變速箱需求目標轉速同步,由變速器判斷換擋時機實現換擋。
1 整車結構及參數
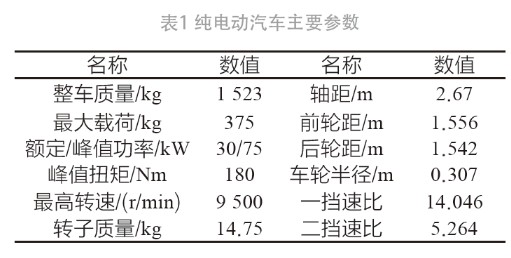
純電動汽車采用前置前驅單電機兩擋變速箱布置方式,動力部分工作原理如示意圖1所示。由動力電池給驅動電機供電,電機通過變速器驅動車輪,實行車輛行駛;同時動力電池為DC-DC逆變器供電,轉換成低壓12 V給蓄電池充電及整車低壓用電器供電。主要相關控制器包括車輛控制器(VCU)、電池管理系統(BMS)、電機控制器(MCU)、變速箱控制器(TCU)和逆變器控制器(DC/DC),各控制器之間通過CAN信號通訊。車輛控制系統(VCU)通過硬線采集油門踏板、換擋機構、剎車踏板、車輛模式開關等組件的狀態,然后根據各系統的狀態和駕駛員請求,再向各模塊控制單元下發相應的控制指令,各控制模塊協作完成換擋。整車設計相關的主要參數見表1。
2 整車換擋點
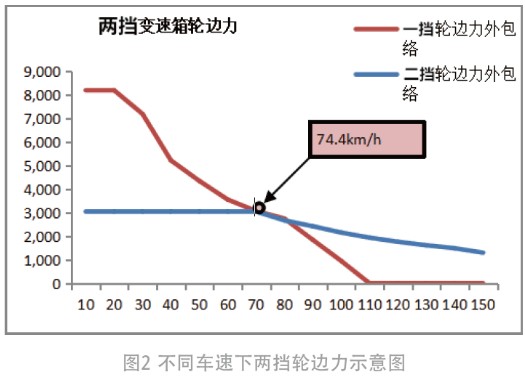
以動力性為主要需求,根據整車參數仿真換擋分析為:整車車速低于74.4 km/h(對應電機轉速約9 000rpm)(如圖2),一擋下的變速箱輸出扭矩始終要高于二擋;整車車速高于74.4 km/h時,二擋下的變速箱輸出扭矩要高于一擋。為更好的滿足整車動力性能,選擇車速在74.4 km/h附近升擋,同時考慮油門開度,會適當增大換擋的車速范圍。
3 換擋策略
3.1 換擋過程規劃
從換擋準備到執行換擋,再恢復駕駛員的駕駛需求,整個換擋過程規劃如圖3所示,大致分為11步,由VCU和TCU共同協作完成。
①VCU判斷可以配合TCU進行換擋;
②TCU根據換擋圖譜發送換擋指令及結合狀態;
③VCU進行降扭至0控制;
④TCU發送脫擋開始;
⑤TCU發送脫擋中(可進行速度同步狀態)及目標
轉速;
⑥TCU發送脫擋完成 ;
⑦VCU降扭調速(小扭矩,目標轉速);
⑧TCU發送同步,VCU卸載小扭矩;
⑨TCU開始掛擋,發送掛擋開始;
⑩TCU發送掛擋中(VCU可做扭矩恢復);
?VCU恢復扭矩到駕駛員需求扭矩。
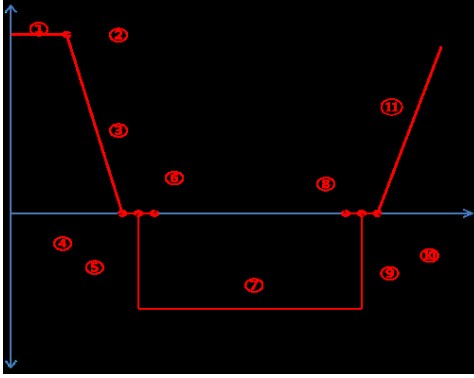
圖3 換擋過程規劃示意圖
根據上述換擋過程規劃,以及TCU反饋的變速箱實時信息,基于MATLAB/Simulink進行編程,①通過Stateflow編輯換擋狀態管理,②轉速同步模塊實現PI控制轉速同步。
3.2 PI控制轉速同步
換擋過程中,VCU負責扭矩和轉速管理,TCU負責換擋時機判斷及換擋操作,MCU負責扭矩執行及反饋。由TCU根據實車行駛狀態提供實時的換擋目標轉速,VCU根據目標轉速和實際轉速的偏差進行比例積分計算,所得請求扭矩由MCU控制電機執行。
電機轉動慣量J=m×r2,角加速度α= ,轉矩
,轉矩 ,其中α -rad/s2,t-s,T-Nm,n-r/min。基于MATLAB/Simulink編程PI控制電機扭矩,并集成于車輛控制器(VCU)模型中如圖4所示,最終編譯成軟件刷寫車輛控制器進行實車測試。
,其中α -rad/s2,t-s,T-Nm,n-r/min。基于MATLAB/Simulink編程PI控制電機扭矩,并集成于車輛控制器(VCU)模型中如圖4所示,最終編譯成軟件刷寫車輛控制器進行實車測試。
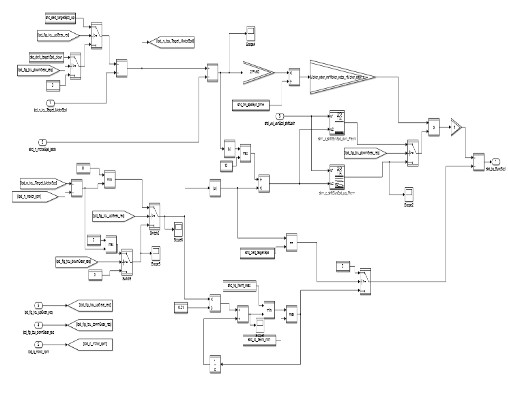
圖4 PI控制轉速同步模型
4 整車測試與結果分析
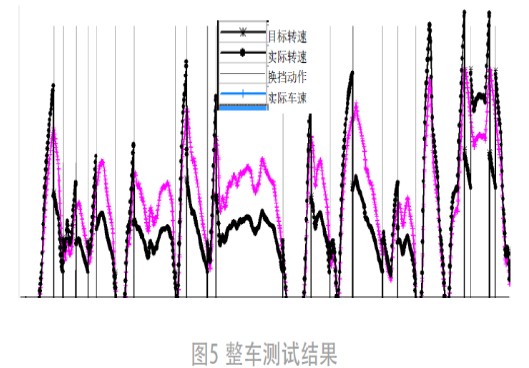
升擋策略根據不同的油門深度設定車速(60~80) km/h多個換擋點,降擋策略定在車速20 km/h時換擋。在實驗場地中對實車進行不同深度油門加速至80 km/h以上并減速至20 km/h以下,完成實車的升擋和降擋工況測試。通過汽車開發常用工具INCA7.1軟件記錄VCU控制器運算的實時數據,并通過其附屬工具箱MDA調取電機實際轉速、變速箱換擋所需目標轉速、換擋動作狀態和整車實際車速等關鍵變量進行數據分析。整車多種工況的隨機測試結果如圖5,圖中已注明曲線名稱,圖5~圖9中的曲線名稱均一致。
4.1 車速60km/h 升擋根據上述測試結果截取60 km/h、70 km/h、80 km/h升擋和20 km/h降擋4種工況的實際車速、目標轉速、電機實際轉速和換擋動作參數分析,換擋總時間要求600 ms以內。
4.1 車速60 km/h升擋
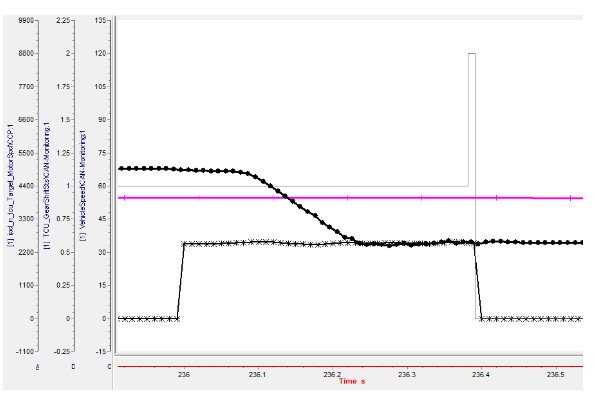
圖6 車速60 km/h升擋整車測試結果
VCU收到TCU發送的目標轉速和脫擋狀態時對電機轉速閉環控制,從圖6可見,車速為60 km/h工況下轉速同步到開始換擋使用時間約306 ms,執行換擋動作使用時間約9.6 ms ,換擋前后車速較為平穩,無明顯波動。
4.2 車速70 km/h升擋
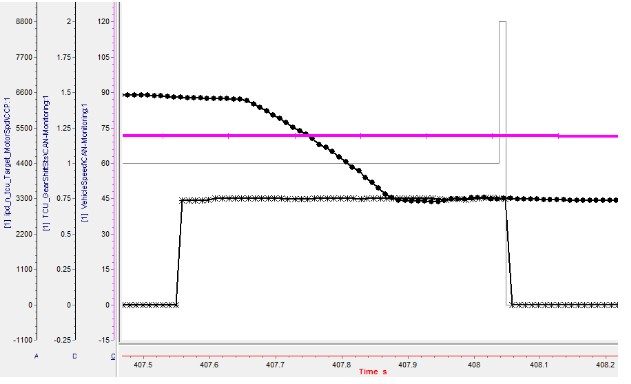
圖7 車速70 km/h升擋整車測試結果
從圖7可見,車速為70 km/h工況下轉速同步到開始換擋使用時間約380 ms,執行換擋動作使用時間約10.02 ms ,換擋前后車速較為平穩,無明顯波動。
4.3 車速80 km/h升擋
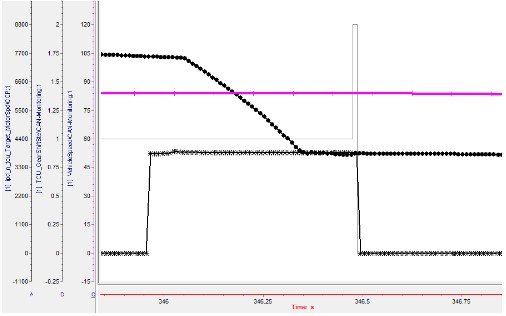
圖8 車速80 km/h升擋整車測試結果
從圖8可見,車速為80 km/h工況下轉速同步到開始換擋使用時間約318 ms,執行換擋動作使用時間約9.8 ms,換擋前后車速較為平穩,無明顯波動。
4.4 車速20km/h降擋
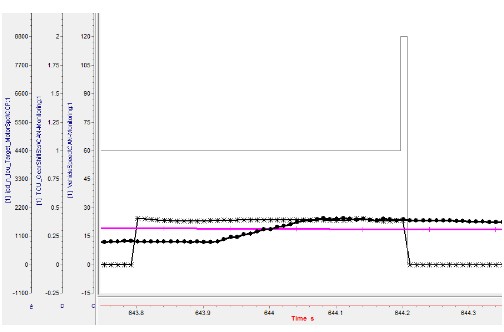
圖9 車速20 km/h降擋整車測試結果
從圖9可見,車速為20 km/h工況下轉速同步到開始換擋使用時間約290 ms,執行換擋動作使用時間約9.97 ms,降擋前后車速較為平穩,無明顯波動。
5 結論
通過對純電動汽車多種車速下換擋過程分析,轉速同步時間和換擋時間滿足設計要求,換擋前后車速平穩,這種PI控制純電動汽車兩擋變速器換擋策略實現了較為快速平順的換擋。此換擋策略通過實車驗證,有較好的實用性,為純電動汽車兩擋變速器換擋策略提供了應用基礎。
責任編輯:tzh
-
mcu
+關注
關注
146文章
17123瀏覽量
350986 -
變速器
+關注
關注
5文章
317瀏覽量
34324 -
純電動汽車
+關注
關注
5文章
464瀏覽量
25658
發布評論請先 登錄
相關推薦
長安福特福克斯電控自動變速器介紹與故障維修
自動變速器動力傳遞路線分析(十二)—81-40LE系列自動變速器(圖
自動變速器動力傳遞路線分析
純電動汽車電驅動的結構形式
電動機與變速器總成的熱管理分析
自動變速器控制系統使用的節氣門位置傳感器的識別與檢測
最新電動汽車機電變速傳動技術的介紹
基于換擋品質的變速器換擋控制策略研究





 工商網監
工商網監
評論