

采用基于帶有無傳感器磁場定向控制(FOC)的永磁同步電動機(PMSM)的高級電動機控制系統(tǒng),有兩個主要的驅(qū)動因素:提高能源效率和加強產(chǎn)品差異化。雖然具有無傳感器FOC的PMSM已被證明可以實現(xiàn)這兩個目標,但需要一種提供整體解決方法的生態(tài)系統(tǒng)。
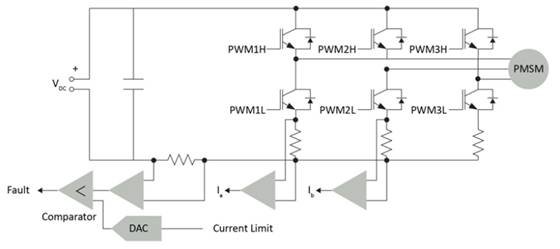
圖1:使用三相電壓源逆變器的三相無傳感器PMSM控制系統(tǒng)
為什么選擇PMSM?
PMSM電動機是使用電子換向的無刷電動機。它經(jīng)常與無刷直流電動機(BLDC)混淆,后者是無刷電動機家族的另一成員,它也使用電子換向,但結(jié)構(gòu)略有不同。PMSM的結(jié)構(gòu)針對FOC進行了優(yōu)化,而BLDC電機經(jīng)過優(yōu)化以使用6步切換技術(shù)。優(yōu)化導致PMSM具有正弦反向電動勢(Back-EMF),而BLDC電機具有梯形反向電動勢。
這些電動機中的轉(zhuǎn)子傳感器也不同。PMSM通常使用位置編碼器,而BLDC電機使用三個霍爾傳感器進行操作。如果需要考慮成本,設(shè)計人員可以考慮采用無傳感器技術(shù),從而消除了磁體、傳感器、連接器和布線的成本。由于減少了系統(tǒng)中可能發(fā)生故障的組件,因此消除傳感器還提高了可靠性。當將無傳感器PMSM與無傳感器BLDC進行比較時,使用FOC算法的無傳感器PMSM可以提供更好的性能,同時使用類似的硬件設(shè)計,并且實現(xiàn)成本相當。
切換到PMSM的最大受益者是那些當前使用有刷直流(BDC)或交流感應(yīng)電動機(ACIM)。開關(guān)的主要優(yōu)點包括更低的功耗,更高的速度,更平穩(wěn)的轉(zhuǎn)矩,更低的噪聲,更長的使用壽命以及更小的尺寸,從而使該技術(shù)更具競爭力。但是,為了通過使用PMSM實現(xiàn)這些好處,開發(fā)人員需要實現(xiàn)更復雜的FOC控制技術(shù)以及其他特定于應(yīng)用的算法,以滿足系統(tǒng)需求。與BDC或ACIM相比,PMSM更為昂貴,但它提供了更多優(yōu)勢。
實施挑戰(zhàn)
但是,要實現(xiàn)使用PMSM的優(yōu)勢,需要了解實現(xiàn)先進的FOC電機控制技術(shù)所固有的硬件復雜性,以及所需的領(lǐng)域?qū)I(yè)知識。圖1顯示了使用三相電壓源逆變器的三相無傳感器PMSM控制系統(tǒng)。控制逆變器需要三對相互關(guān)聯(lián)的高分辨率PWM信號,以及大量需要信號調(diào)理的模擬反饋信號。該系統(tǒng)還需要具有容錯的硬件保護功能,該功能使用高速模擬比較器進行設(shè)計以實現(xiàn)快速響應(yīng)。感測、控制和保護所需的這些額外的模擬組件會增加解決方案成本,典型的BDC電機設(shè)計或ACIM的控制不需要這些。
定義和驗證PMSM電機控制應(yīng)用的組件規(guī)格還需要額外的開發(fā)時間。為了應(yīng)對這些挑戰(zhàn),設(shè)計人員可以選擇微控制器,可以提供高度的模擬集成,并具有針對PMSM電機控制量身定制的設(shè)備規(guī)格。這將減少所需的外部組件數(shù)量,并優(yōu)化物料清單(BOM)。高度集成的電機控制設(shè)備現(xiàn)已提供高分辨率PWM,以方便實施高級控制算法,用于精密測量和信號調(diào)節(jié)的高速模擬外設(shè),功能安全所需的硬件外設(shè)以及用于通信和調(diào)試的串行接口。
同樣具有挑戰(zhàn)性的是電動機控制軟件與電動機機電行為之間的相互作用。圖2顯示了標準的無傳感器FOC框圖。要將其從一個概念應(yīng)用于實際設(shè)計,需要了解控制器架構(gòu)和數(shù)字信號處理器(DSP)指令,以實現(xiàn)對數(shù)學要求嚴格的時間緊迫的控制回路。
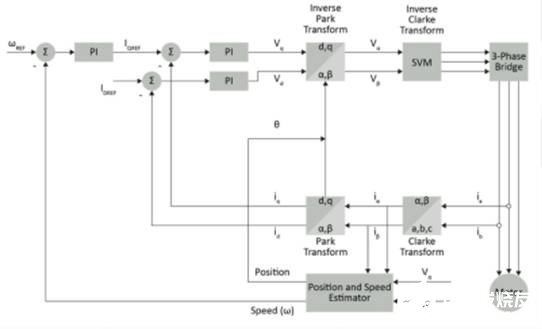
圖2:標準無傳感器FOC的框圖
為了獲得可靠的性能,控制回路必須在一個PWM周期內(nèi)執(zhí)行。需要對控制回路進行時間優(yōu)化的三個原因。
1)約束:使用等于或大于20KHz(50uS時間段)的PWM開關(guān)頻率來抑制逆變器開關(guān)產(chǎn)生的噪聲。
2)為了獲得更高帶寬的控制系統(tǒng),控制回路必須在一個PWM 周期內(nèi)執(zhí)行。
3)為了支持其他后臺任務(wù),例如系統(tǒng)監(jiān)視,特定于應(yīng)用程序的功能和通信,控制回路需要運行得更快。FOC算法的目標應(yīng)是在少于10uS的時間內(nèi)執(zhí)行。
許多制造商都提供了FOC展示軟件,該軟件帶有用于轉(zhuǎn)子位置的無傳感器估算器。但是,在FOC算法甚至無法開始旋轉(zhuǎn)電動機之前,必須配置各種參數(shù)以使其與電動機和硬件相匹配。為了滿足所需的速度和效率目標,必須進一步優(yōu)化控制參數(shù)和系數(shù)。這可以通過以下組合實現(xiàn):1)使用電機數(shù)據(jù)表推導參數(shù),2)通過試錯法進行實驗。當電動機參數(shù)可能無法始終準確地表征電動機參數(shù)時,或者當設(shè)計人員無法使用高精度測量設(shè)備時,開發(fā)人員將不得不采用試錯法。手動調(diào)整的過程需要時間和經(jīng)驗。
PMSM電動機用于許多不同的應(yīng)用,可在不同的環(huán)境中運行或具有不同的設(shè)計限制。例如,在汽車散熱器風扇中,當發(fā)動機將要啟動時,由于風的作用,風扇葉片可沿反方向自由旋轉(zhuǎn)。在這種情況下,使用無傳感器算法啟動PMSM電機是一項挑戰(zhàn),可能會損壞逆變器。一種解決方案是檢測旋轉(zhuǎn)方向和轉(zhuǎn)子位置,并使用此信息通過主動制動,在啟動電動機之前使電動機減速至停止狀態(tài)。同樣,可能有必要實施其他算法,例如每安培最大轉(zhuǎn)矩(MTPA),轉(zhuǎn)矩補償和弱磁等。這些類型特定于應(yīng)用程序的附加算法對于開發(fā)實用的解決方案是必不可少的,但它們也會因為增加開發(fā)時間和軟件驗證復雜化而增加設(shè)計復雜性。
降低復雜度的一種解決方案是讓設(shè)計人員創(chuàng)建一種模塊化軟件體系結(jié)構(gòu),該體系結(jié)構(gòu)使特定于應(yīng)用程序的算法可以添加到FOC算法中,而不會影響時間緊迫的執(zhí)行。圖3顯示了典型的實時電機控制應(yīng)用程序的軟件架構(gòu)。該框架的核心是FOC功能,它具有嚴格的時序約束和許多特定于應(yīng)用的附加功能,框架中的狀態(tài)機負責控制功能與主應(yīng)用程序接口。該體系結(jié)構(gòu)需要在軟件功能塊之間有一個定義明確的接口,以使其模塊化并簡化代碼維護。模塊化框架支持將不同的特定于應(yīng)用程序的算法與其他系統(tǒng)監(jiān)視,保護和功能安全案例進行集成。
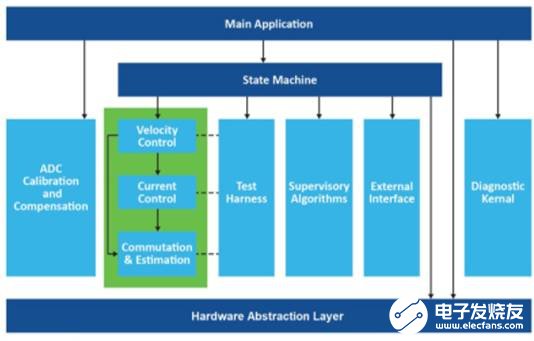
圖3:FOC的應(yīng)用框架
模塊化體系結(jié)構(gòu)的另一個好處是將外圍接口層(或硬件抽象層)與電機控制軟件分離,這使設(shè)計人員可以隨著應(yīng)用程序和性能要求的變化將IP無縫地從一個電機控制器遷移到另一個電機控制器。
完整生態(tài)系統(tǒng)的要求
為了應(yīng)對這些挑戰(zhàn),需要針對無傳感器FOC設(shè)計量身定制的電機控制生態(tài)系統(tǒng)。電機控制器,硬件,軟件和開發(fā)環(huán)境都應(yīng)一起工作,以簡化實現(xiàn)高級電機控制算法的過程。為此,生態(tài)系統(tǒng)應(yīng)具有以下功能:
1.一種高級工具,可自動執(zhí)行電機參數(shù)測量,設(shè)計控制環(huán)并生成源代碼,使沒有專業(yè)知識的設(shè)計人員也可以實現(xiàn)FOC電機控制以及編寫和調(diào)試非常耗時的關(guān)鍵代碼。
2. FOC的應(yīng)用程序框架和不同的特定于應(yīng)用程序的附加算法減少了開發(fā)和測試時間。
3.具有確定性響應(yīng)的電機控制器和集成的模擬外設(shè),可在單個芯片中進行信號調(diào)理和系統(tǒng)保護,從而降低了解決方案的總成本。
圖4顯示了一個電機控制生態(tài)系統(tǒng)架構(gòu)的示例,其中包括應(yīng)用程序框架和用于高性能dsPIC33電機控制數(shù)字信號控制器(DSC)的開發(fā)套件。該開發(fā)套件基于GUI的FOC軟件開發(fā)工具構(gòu)建,該工具可以測量關(guān)鍵的電機參數(shù)并自動調(diào)整反饋控制增益。它還使用Motor Control應(yīng)用程序框架(MCAF)為在開發(fā)環(huán)境中創(chuàng)建的項目生成所需的源代碼。解決方案堆棧的核心是電機控制庫,它使實現(xiàn)應(yīng)用程序的時間緊迫的控制回路功能以及與dsPIC33 DSC的電機控制外設(shè)進行交互成為可能。這個GUI與多個可用的電機控制開發(fā)板配合使用,以支持電機參數(shù)提取以及適用于各種低壓和高壓電機的FOC代碼生成。

圖4:Microchip Technology電機控制生態(tài)系統(tǒng)架構(gòu)
對高能效和產(chǎn)品差異化的需求推動了向無刷電機的過渡。 全面的電機控制生態(tài)系統(tǒng)提供了一種整體方法來簡化帶有PMSM的無傳感器FOC的實現(xiàn),并且應(yīng)包括專用的電機控制器,快速原型開發(fā)板和易于使用的FOC開發(fā)軟件,以實現(xiàn)代碼自動生成。
編輯:lyn
-
PMSM
+關(guān)注
關(guān)注
14文章
248瀏覽量
42557 -
FOC
+關(guān)注
關(guān)注
21文章
341瀏覽量
44010 -
永磁同步電動機
+關(guān)注
關(guān)注
14文章
75瀏覽量
12258 -
電動機控制
+關(guān)注
關(guān)注
1文章
18瀏覽量
10884
發(fā)布評論請先 登錄
變頻器如何選擇變頻調(diào)速系統(tǒng)的電動機?

如何正確選擇交流電動機變頻調(diào)速控制方案?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論