


由樹莓派基金會剛剛發(fā)布的RaspberryPi Pico(樹莓派Pico)是一個小巧而強大的板子,它可以為用戶提供了創(chuàng)建大大小小的項目的機會。其中一個項目是機器人,為此我們需要用到馬達。那么我們?nèi)绾斡肦aspberryPi Pico來控制直流電機呢?我們可以把它們直接連接到GPIO嗎?
答案是否定的。RaspberryPi Pico的GPIO引腳無法提供直流電機所需的電流,如果嘗試連接,很可能會損壞Pico。為此我們需要一個電機驅動器,充當Pico和電動機之間的橋梁。我們打開/關閉兩個PicoGPIO引腳,讓它們控制電機驅動器,電機驅動器輸出較大的電流來控制電機運動。
對于這個小項目,將需要以下準備
運行MicroPython的Raspberry Pi Pico安裝在您的電腦上的Thonny4 x公對公跳線半尺寸或全尺寸面包板電機驅動板。在我們的案例中,我們使用了DRV8833芯片,但L298或L9110S芯片應該也可以。5V / 6V直流電機。我們使用了一個微型齒輪金屬電機,電機需要2根公對公的跳線來連接到面包板上。
使用RaspberryPi Pico的直流電動機的硬件設置
我們在該項目中使用的芯片是DRV8833,選定的特定版本是為面包板制作的,但是還有許多其他版本,包括設計用于嵌入機器人的版本。市場上還有其他電機控制器,例如L298D和L9110S,所有這些電機控制器都有相同的輸入/輸出約定。
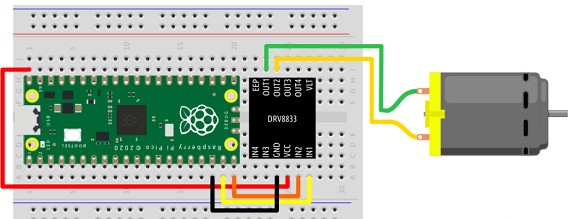
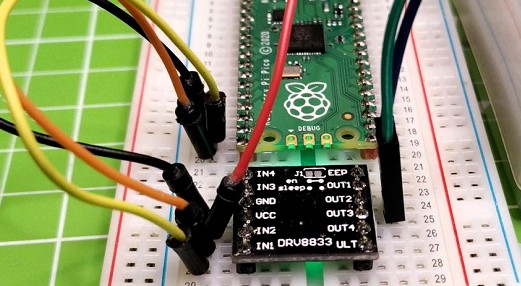
將Raspberry Pi Pico放入面包板,使微型USB端口掛在面包板的末端。將DRV8833電機控制器放入面包板,使插針位于中間通道的兩側。使用跳線將Raspberry Pi Pico的VBUS引腳連接到DRV8833的VCC引腳。這將直接通過USB提供的5V為電機控制器供電。將Raspberry Pi Pico的GND引腳連接到DRV8833的GND引腳。將Raspberry Pi Pico的GPIO 14連接到DRV8833的IN1。將Raspberry Pi Pico的GPIO 15連接到DRV8833的IN2。將OUT1和OUT2連接至電動機的引腳
Raspberry Pi Pico直流電動機的軟件設置
1. 建立電路后,連接您的Raspberry Pi Pico并打開Thonny應用程序。用于設定擁有控制DRV8833電機控制器的輸出的I/O管腳。
import utimefrom
machine import Pin
2.創(chuàng)建兩個對象,motor1a和motor1b。這些將存儲用作輸出的GPIO引腳號,以控制DRV8833電機控制器。
motor1a = Pin(14, Pin.OUT)
motor1b = Pin(15, Pin.OUT)
3.創(chuàng)建一個使電動機“前進”的函數(shù)。為此,我們需要將一個引腳拉高,另一個引腳拉低。這繼而將我們的預期方向傳達給電機控制器,并且相應的輸出引腳將緊隨其后,迫使電機沿設定方向移動。
def forward():
motor1a.high()
motor1b.low()
4.創(chuàng)建一個向后移動的函數(shù)。這會看到GPIO引腳狀態(tài)反轉,從而導致電動機沿相反方向旋轉。
def backward():
motor1a.low()
motor1b.high()
5.創(chuàng)建一個停止電動機的函數(shù)。通過將兩個引腳都拉低,我們告訴電動機控制器停止電動機的所有運動。
def stop():
motor1a.low()
motor1b.low()
6.創(chuàng)建一個最終的“測試”函數(shù),該函數(shù)將調(diào)用先前的函數(shù)并運行一個測試程序,該程序將使電動機“向前”旋轉兩秒鐘,再“向后”旋轉兩秒鐘。然后它將停止電動機。
def test():
forward()
utime.sleep(2)
backward()
utime.sleep(2)
stop()
7.創(chuàng)建一個for循環(huán),該循環(huán)將連續(xù)5次運行此測試函數(shù)
for i in range(5):
test()
將代碼作為motor.py保存到Raspberry Pi Pico,然后單擊綠色箭頭以運行代碼。電機將雙向旋轉五次。
責任編輯:pj
-
驅動器
+關注
關注
54文章
8701瀏覽量
150124 -
控制器
+關注
關注
114文章
17132瀏覽量
184538 -
直流電機
+關注
關注
36文章
1736瀏覽量
71874
發(fā)布評論請先 登錄
控制直流電機的正轉反轉和PWM調(diào)速直流電機驅動,單片機...
直流電機控制的基本方法
ros與arduino通信控制直流電機






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論