

2021年4月,豐田汽車在日本市場推出豐田新款Mirai和雷克薩斯新款LS,新車配備Advanced Drive系統,該系統具備L2級自動駕駛技術。前者起售價格為860萬日元(約合人民幣51.5萬元),后者起售價格為1794萬日元(約合人民幣107.5萬元),如果是奔馳S級,這個價格不算高,但對雷克薩斯來說,這個價格是很高的。
說是L2級自動駕駛,實際比特斯拉的FSD要高出一大截,稱L4絲毫不過分。之前本田曾經推出全球第一臺L3車,實際是只生產100輛,只租不賣。只有豐田的才是真正量產車,不過豐田的價格也是夠高的了,銷量肯定不高,我想豐田應該非常清楚這一點。估計一年銷量只有幾千輛,甚至是幾百輛,這樣一來反而是好事,豐田可以使用非量產的半導體元件。
很多人會質疑夸大了豐田的L2,但仔細研究后就會發現,豐田的L2就是L4級自動駕駛,或者說豐田的硬件系統已經具備了L4級自動駕駛的能力和需求。眾所周知L4與L3最大差別是L4能做到Fail-Operation,即具備兩套完全不同的自動駕駛運算系統,一套作為主系統失效時的備份,在主系統失效時,仍能保持自動駕駛。L3則是Fail-Safety,系統失效時,人工接手,即失效時還要保持安全。像特斯拉或英偉達之類的,設置兩個完全相同的主芯片只是提高算力,而不能做后備,既然是主系統已經失效,那么只有與主系統完全不同的系統才是真正的后備,才能真正做到Fail-Operation。
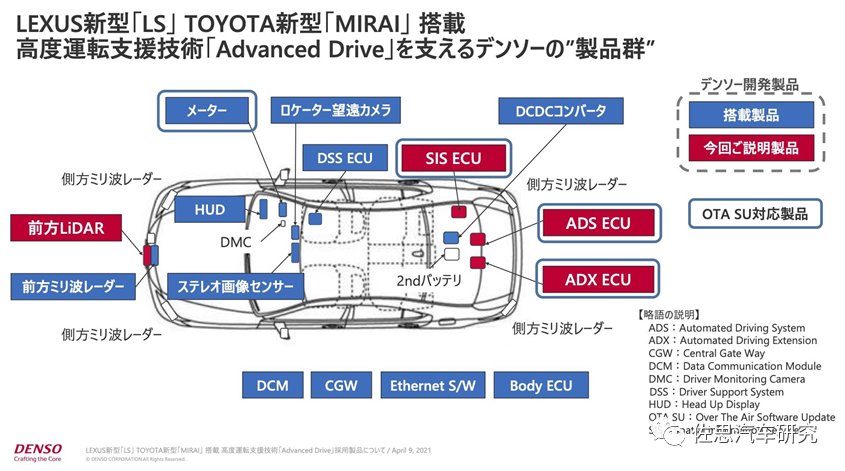
豐田的自動駕駛系統如上圖,不僅計算系統有后備,電源系統也考慮到了,增加了第二塊電池系統。主系統即ADS ECU,后備為ADX。兩套系統同時工作,ADS負責絕大部分事物,保證基本安全,ADX負責錦上添花,讓車不僅安全也具備智能。
這一套大約增加了66萬日元硬件成本,也就是大約4萬人民幣的成本,未來或許豐田車可以選裝,選裝價格估計得20萬人民幣。加上雷克薩斯LS500H本來就標配的雙目系統,構成完整的L4級自動駕駛。這一套系統中前向主激光雷達成本估計最高,大約1-1.5萬人民幣,兩個側向激光雷達合計大約5-8千人民幣,3個ECU估計要1.2-1.4萬人民幣。軟件成本無法估算,要看多少銷量了。
傳感器方面,主前向激光雷達由電裝開發,電裝與法雷奧Scala的設計如出一轍,只是巧妙地將單向變雙向。同時電裝可能是二代Scala的水準,也是16線設計,但也有可能更高,32線的設計。側向則是大陸汽車的HFL-110 Flash激光雷達。核心的雙目系統也是電裝開發的。
毫米波雷達還是要的,總共有5個毫米波雷達,都由電裝開發并生產,豐田供應鏈盡量垂直化,能自己做的部件都要自己做,不僅能保證部件性價比極高,也能快速迭代產品,還能保證供應鏈穩定度。歐美和中國廠家則是能對外采購的盡量對外采購。
ADS使用高等級車規元件,使用傳統非深度學習算法也就是可確定性可解釋性的算法。ADX以深度學習算法為主,但深度學習不具備確定性和可解釋性,因此永遠無法通過功能安全認證,但要車輛智能化而不是僅僅保持安全,深度學習必不可少。ADX系統都能勝任90%的自動駕駛任務,但不能保證100%安全,而ADS是保證安全,兩套系統聯用,既能有智能,也能在主系統失效后依舊正常運行自動駕駛,當然這個自動駕駛的時間段不能太長。這就是豐田與大多數廠家的不同,豐田更注重安全,其他廠家更注重智能。
ADS里豐田使用瑞薩的主SoC,ADX里是英偉達的Xavier做主芯片。
為什么用瑞薩的主SoC,首先是瑞薩是傳統車規芯片大廠,對車規和安全更重視,其次是瑞薩與豐田關系緊密,瑞薩的自動駕駛用芯片就是和豐田聯合開發的。

上表為瑞薩的股東列表,豐田控股的電裝(曾經是豐田的電子與熱交換事業部)是第二大股東,最初電裝持股只有0.5%,后來陸續花費數十億美元增持到8.95%。豐田汽車持股2.92%。瑞薩的第一大股東是日本株式會社產業革新機構(Innovation Network Corporation of Japan, INCJ),這是日本政府與19家民營企業合資成立的投資公司,日本財務省占95.3%的股份,瑞薩可以算日本的半國營企業。那19家民營企業里也包括了豐田。早期INCJ持有瑞薩股份超過50%,后來將大約8%的股份都轉讓給了電裝。在2017年,豐田、瑞薩和電裝建立了自動駕駛合作聯盟。
豐田自動駕駛ADS可能使用瑞薩最新的R-CAR V3U。有人會說,按照日程表,R-CAR V3U要到2023年才量產,這個量產指的是每月都超過1萬片的規模。鑒于豐田自動駕駛系統的出貨量和豐田與瑞薩之間的緊密合作關系,豐田自動駕駛ADS可能使用瑞薩的R-CAR V3U,在沒有大規模量產前,每個月幾百片的量還是能滿足的。
順便說一下,中國一汽紅旗也決定使用R-CAR V3U做自動駕駛系統主芯片,但是要到2023年下半年才量產。大眾集團的自動駕駛系統也很有可能使用R-CAR V3U,因為雙方在座艙領域已經緊密合作,德國大眾和上汽大眾都與瑞薩建立了聯合實驗室。
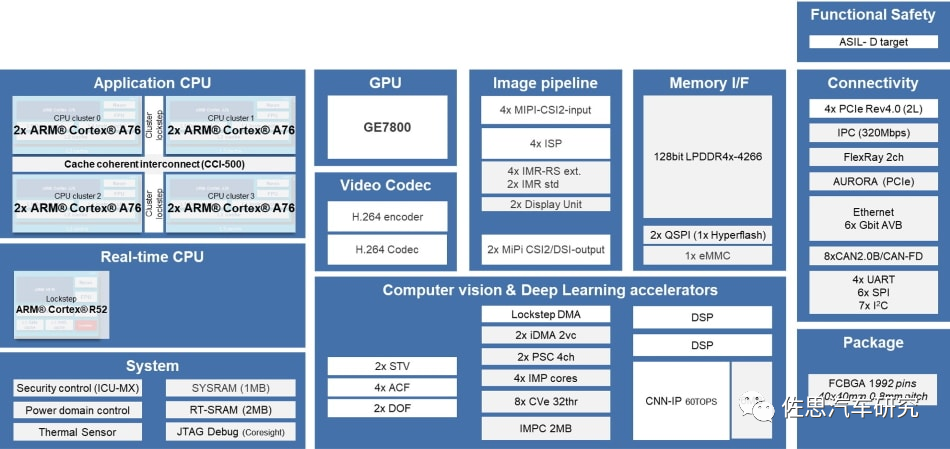
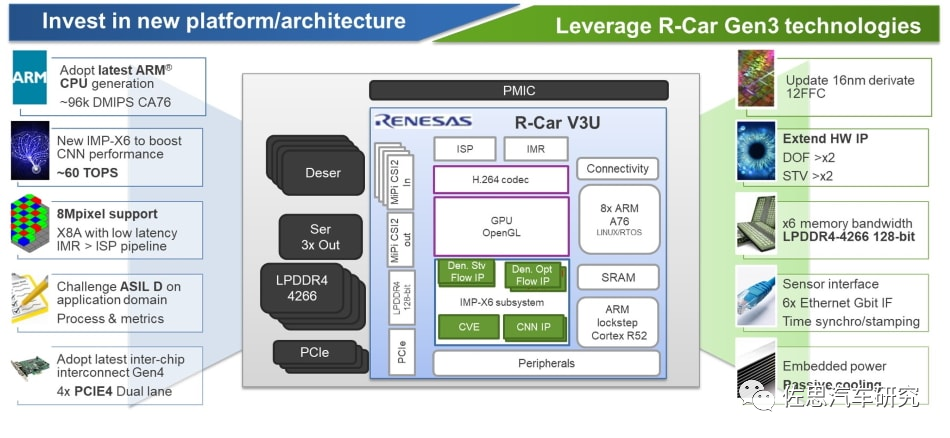
V3U內部框架如上圖,采用8核A76設計,但也不是像特斯拉那樣簡單堆12個A72,它使用了ARM的Corelink CCI-500,即Cache一致性互聯。它提供處理器集群之間的完整Cache一致性,比如 Cortex-A76 和 Cortex-A55,而且可以實現 big.LITTLE 處理。它還可為其他的設備(如 Mali GPU、網絡接口和加速器)提供 I/O 一致性。實時鎖步CPU是ARM的R52,英偉達最新的1000TOPS芯片Atlan也是用了R52。
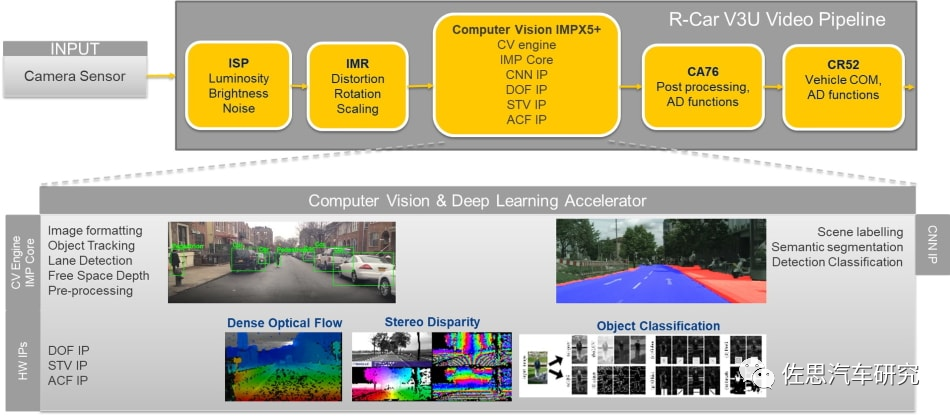
V3U視覺管線如上圖,可以看到V3U有很多硬核計算機視覺模塊,包括立體雙目視差,稠密光流、CNN、DOF、STV、ACF等。功能方面包括圖像格式化、目標追蹤、車道檢測、自由空間深度、場景標注、語義分割、檢測分類等都具備,類似于Mobileye的全封閉算法了。
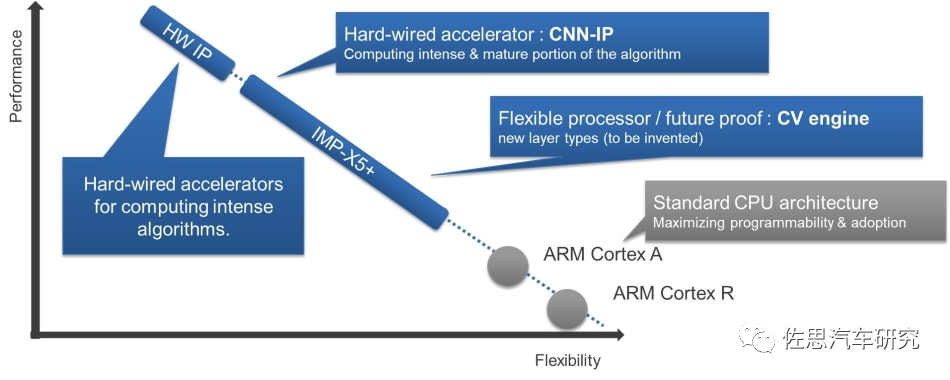
圖像處理主要還是IMP-X5+,靈活性應該比Mobileye還是要高點。因為針對性比較強,也為了節約成本,降低功耗,瑞薩沒有使用太昂貴的GPU,只是簡單增加了一個低功耗GPU,即Imagination Technologies的PowerVR GE7400,1個著色器集群+32個ALU核心,算力只有38.4GFLOPS@600MHz。
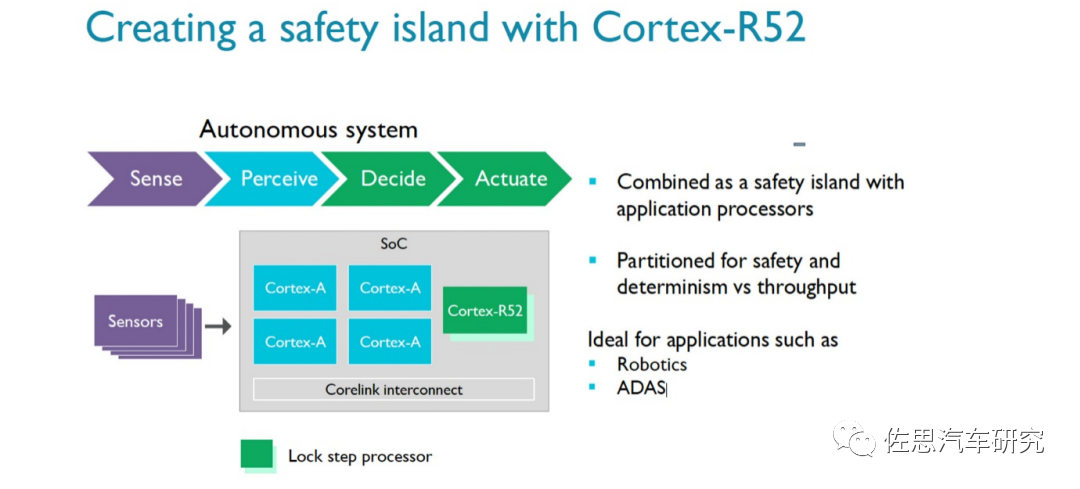
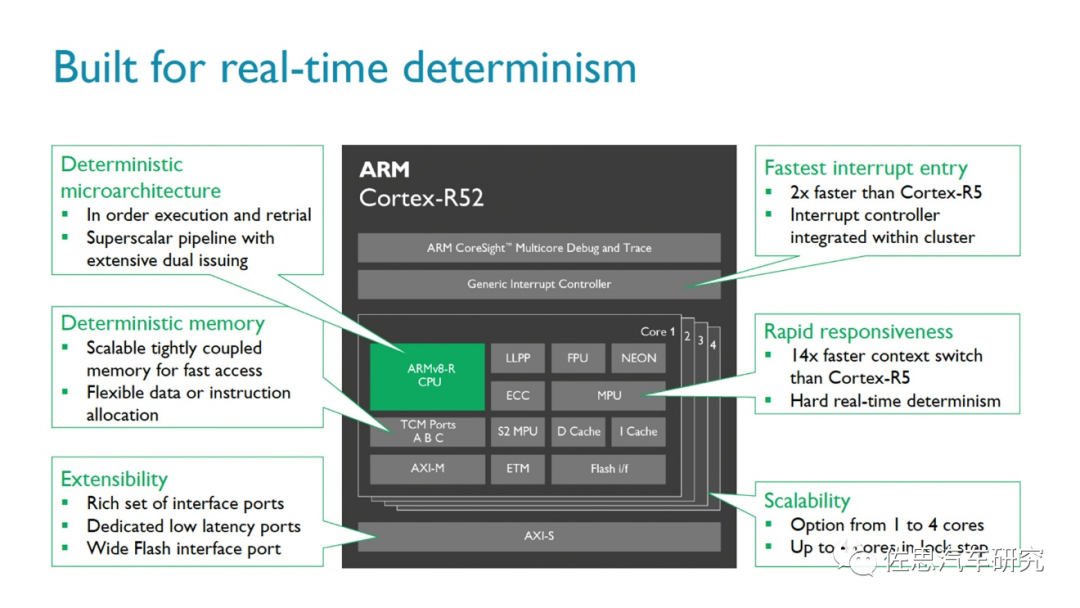
R52是ARM在2016年發布的專為自動駕駛安全市場供應的內核,Cortex-R52最高支持4核心鎖步技術,相比Cortex-R5,有35%的性能提升,上下文切換(亂序)提高14倍,入口搶占提高2倍,支持硬件虛擬化技術。按照ARM的說法,簡單的中控系統可直接用Cortex-R52,但是像工業機器人和ADAS(先進輔助駕駛)系統則建議配合Cortex-A、Mali GPU等提升整體運算。
另外,ARM Cortex-R52通過多項安全標準認證,包括有IEC 61508(工業)、ISO 26262(車用)、IEC 60601(醫療)、EN 50129(車用)以及RTCA DO-254(工業)等。2021年3月還推出了R52+架構。可以最高支持8個核心鎖步。
R52包括三大功能
?軟件隔離:通過硬件實現的軟件隔離,意味著軟件功能互不干擾。對于安全相關的任務,這也意味著需要認證的代碼更少,從而節省了時間、成本和工作量。
?支持多個操作系統:借助虛擬化功能,開發人員能夠在單個CPU內,使用多個操作系統來整合應用。這樣可以簡化功能的添加,而無需增加電子控制單元的數量。
?實時性能:Cortex-R52+的高性能多核集群可為確定性系統提供實時響應能力,且在所有Cortex-R產品中產生的延遲最低。
考慮到成本因素,瑞薩沒有使用尖端的7納米,而是12納米工藝,并且是從原瑞薩R-CAR H3的16納米FinFET工藝升級到12納米FFC工藝,一次性支出很少。但是論到AI性能,絲毫不遜于那些5納米芯片,瑞薩聲稱V3U達到了驚人的13.8TOPS/W的能效比,是頂配EyeQ6的6倍之多。
和奔馳一樣,豐田從一開始就是以立體雙目為自動駕駛的核心。支持立體雙目的還有電裝、博世、捷豹路虎、斯巴魯、本田、德國大陸汽車、華為、大疆、鈴木和亞馬遜與福特投資的電動車品牌Rivian。瑞薩V3H和V3U里都有針對雙目的硬核處理部分,英偉達的Xavier也有。
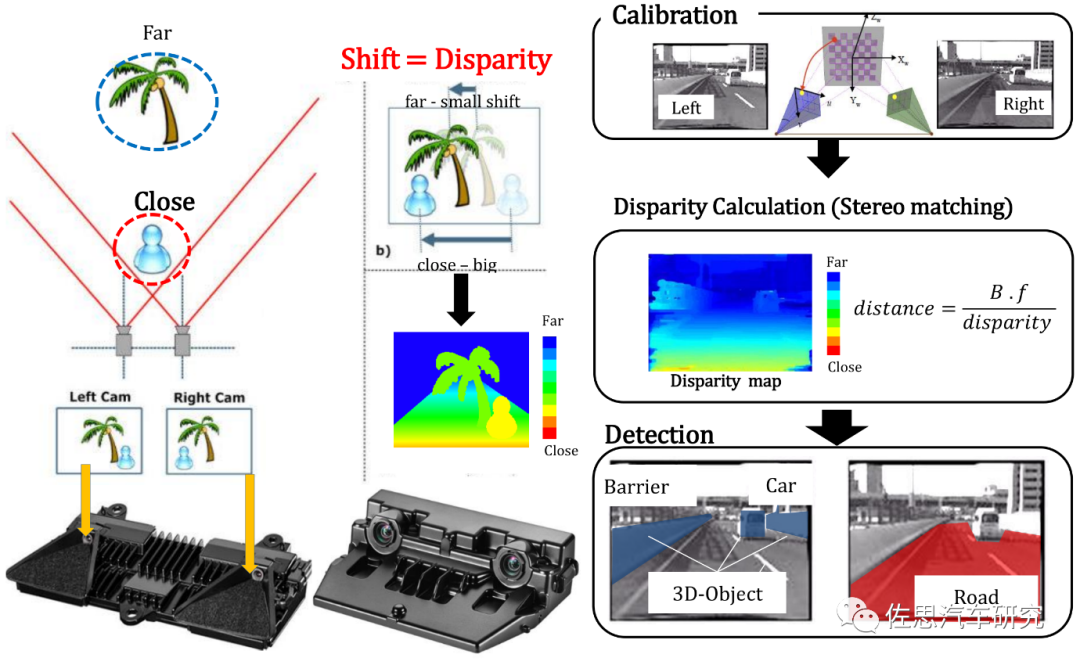
與單目三目的2D系統相比,立體雙目最大的優勢是無需識別目標也可以探測目標的3D信息,也更擅長目標的追蹤與位置預測。單目和三目攝像頭的致命缺陷就是目標識別(分類)和探測(Detection)是一體的,無法分割的。
必須先識別才能探測得知目標的信息,而深度學習的窮舉法特性導致其肯定會出現漏檢,也就是說3D模型有缺失,因為深度學習的認知范圍來自其數據集,而數據集是有限的,不可能窮舉所有類型,因此深度學習容易出現漏檢而忽略前方障礙物,也就是說如果無法識別目標,系統會認為前方障礙物不存在,不做任何減速,特斯拉多次事故大多都是這個原因。
即使特斯拉的HW4.0(FSD Beta)算力再高也是L2,也是無法避免漏檢的,并且FSD Beta版在識別與對于物體的警示功能方面仍有限,對于靜態的物體、緊急駛出的車輛、建筑區域、較復雜的十字路口等無法進行辨別。單目三目系統的另一個缺點是靜態目標反應要慢。
大部分基于立體雙目的算法都是傳統幾何算法,不是深度學習算法,具備確定性和可解釋性。目前提到的自動駕駛算力都是針對深度學習的卷積的,算力再高也與安全無關。針對立體雙目,最大運算量在于立體匹配,一般都用硬核完成。
立體雙目的缺點是標定困難,需要長時間摸索。算法人才奇缺,生態系統單薄,不像單目三目系統,免費資源無處不在,立體雙目需要從內部培養人才,這個過程長達10年以上。這不是特斯拉等廠家能勝任的。寶馬都有些吃力,寶馬也跟風奔馳用過雙目,但效果很差,比單目三目還差,寶馬最近基本放棄雙目路線。
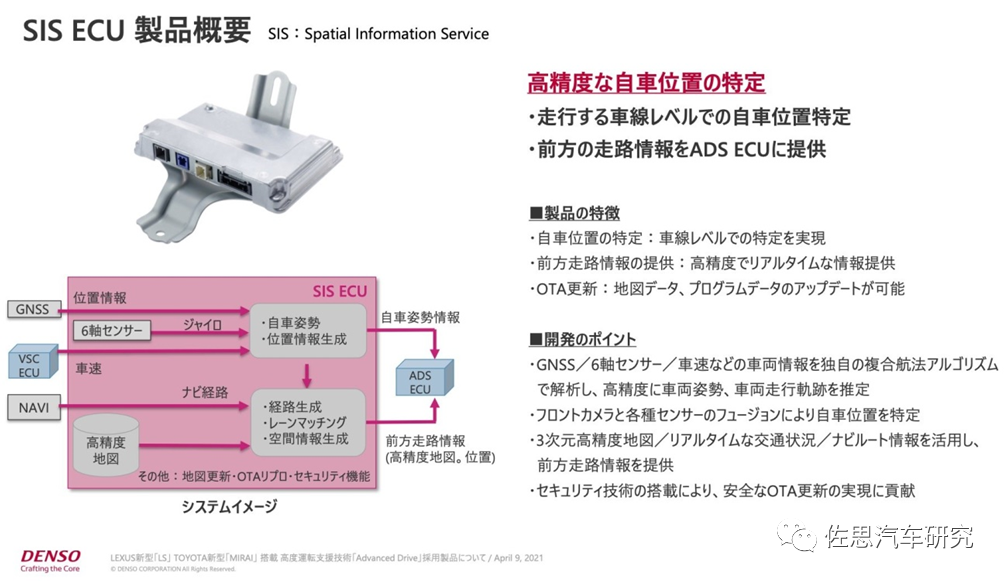
與大多數自動駕駛系統不同,豐田將定位系統特別點出,稱為SIS ECU。
自動駕駛的定位有兩種,一種稱之為絕對定位,不依賴任何參照物和任何先驗信息,直接給出無人車相對地球坐標或者說WGS84坐標系,也就是坐標(B,L,H),其中B為緯度,L為經度,H為大地高即是到WGS-84橢球面的高度。
另一種是相對定位,即有參照物或先驗信息的定位。有像Mobileye這樣的視覺眾包定位REM,視覺對光線變化很敏感,光線每時每刻都在變化,數據的一致性幾乎不可能,逆光與背光完全不一樣,某國產轎車逆光下ADAS系統幾乎完全失效,因此準確度很低。
也有基于激光雷達先驗信息的定位,準確度極高,但成本也極高,且不可能大范圍(幾百公里)使用。此外,相對定位無法與標準的高精度配合使用,兩者的坐標系、數據格式、接口、時間軸完全不同,標準的傳統的高精度地圖必須有絕對定位。
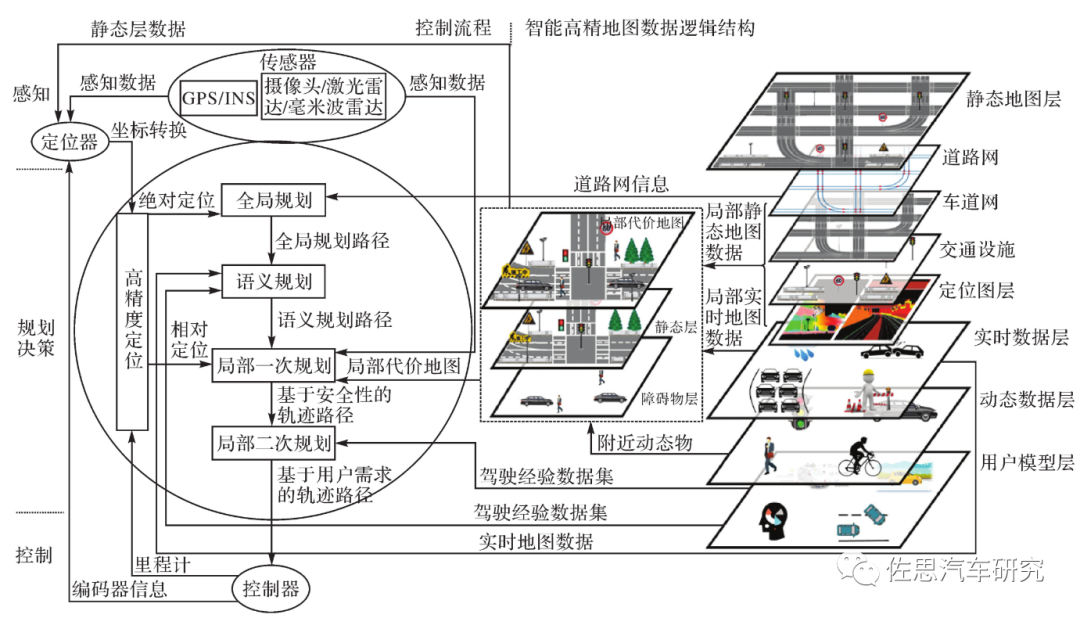
絕對定位是不可缺少的,特別是全局規劃。而目前絕對定位只能用衛星定位,而衛星定位除了QZSS,其余都無法做到自動駕駛的車道級定位。這是L3/L4的瓶頸之一。
之所以說特斯拉是標準的L2級智能駕駛,也是因為特斯拉根本做不到車道級定位,目前全球唯一能做到車道級定位的是凱迪拉克的超級巡航,超級巡航使用了天寶的RTX服務,每年繳納服務費才取得了車道級定位。
天寶的RTX全球跟蹤基站網絡在全球部署了120個左右的跟蹤基站,對GNSS觀測值進行實時跟蹤和存貯,將GNSS觀測值時發送給分別位于歐洲和美國的控制中心,控制中心對全星座精密衛星軌道、鐘差和大氣建模,得到全球精密定位改正數。全球精密位置改正數通過L波段衛星(天寶自己的衛星)或者網絡的方式廣播給服務授權的終端用戶。
特斯拉里的定位只有一個GPS。GPS模塊是NEO-M8L-01A-81,水平精度圓概率誤差(CEP)為2.5米,有SBAS輔助下是1.5米,接收GPS/QZSS/GLONASS/北斗,CEP和RMS是GPS的定位準確度(俗稱精度)單位,是誤差概率單位。
就拿2.5M CEP說吧,意思是以2.5M為半徑畫圓,有50%的點能打在圓內,也就是說,GPS定位在2.5M精度的概率是50%,相應的RMS(66.7%)2DRMS(95%)。當然很多商家為了參數好看,只給出CEP。實際95%概率情況下是6米精度,有SBAS輔助95%概率是3.6米精度。已經遠超一個車道了。冷啟動26秒,熱啟動1秒,輔助啟動3秒。內置簡易6軸IMU,刷新頻率僅20Hz,成本不會超過80美分。
日本的GPS是特殊的GPS,附加了QZSS。
早在1972 年,當時的日本電波研究所(現為信息與通信研究所) 就提出了準天頂衛星系統的概念,論證了這種系統很適合日本這樣地處中緯度、國土狹長的國家;2002年11月1日正式成立了新衛星商業公司Advanced Space Business Corporation (ASBC),共有43家企業出資,三菱電機公司、 日立制作所和豐田汽車公司等7家企業持股占77%。
但是事情并不順利,最后還是由日本政府內務省出面接管QZSS項目。日本政府接管后,在2010年9月11日,發射第一顆衛星Michibiki,2011年6月1日,正式提供導航服務。2017年6月1日,發射第二顆衛星,2017年8月10日,發射第三顆衛星,2017年10月10日,發射第四顆衛星。日本計劃在2023年,將QZSS的導航衛星數量增加為7顆,屆時將不再依賴美國GPS,即可提供位置信息。
2023年-2026年,不加任何地基增強的空間信號測距誤差為2.6米,加上地基增強可做到0.8米左右。2027年-2036年,不加地基增強誤差為1米,2036年以后,誤差為0.3米。QZSS接收機上不需要增加任何硬件成本,只增加軟件成本,蘋果手機就支持QZSS。
QZSS廉價、高效、廣播方式沒有帶寬的瓶頸,也沒有延遲,是最適合自動駕駛的一種技術。缺點是日本國土狹長,7顆星覆蓋率就可超過100%,對中美這樣的大方塊國家,恐怕得幾十顆低軌道衛星。這種基礎工作,恐怕最少要花數十年以上的時間才能決策批準并實施。
除了絕對定位,豐田也考慮了相對定位,為此增加了一顆遠距離攝像頭,即立體雙目之上的那個攝像頭,主要用來檢測車道線,配合高精度地圖的先驗信息,實現相對車道級定位。
IMU方面,豐田可能使用了TDK專為自動駕駛開發的IMU,即IAM-20685或者是IAM-20680HP,這是單獨外置的IMU,精度頗高,IAM-20685達到ASIL-B級標準,陀螺儀量程±2949bps,精確度±300bps。加速度計量程從±16g, ±32g到±65g,精確度±8g, ±20g和 ±36g,價格自然不低,IAM-20680HP大約10美元(5千片起),IAM-20658大約15美元,跟特斯拉的整個GPS模塊價格都差不多,而這僅僅是一個IMU。
中美日三國自動駕駛競賽,日本一向追求產品高完成度,給人感覺落后不少,不過誰能笑到最后?讓時間來回答吧。
編輯:jq
-
IMU
+關注
關注
6文章
340瀏覽量
46529 -
ACF
+關注
關注
1文章
24瀏覽量
10909 -
自動駕駛
+關注
關注
788文章
14225瀏覽量
169746
原文標題:豐田L4級自動駕駛計算平臺剖析
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
佑駕創新車規級L4自動駕駛小巴獲項目定點
廣汽埃安與滴滴推出搭載禾賽AT128激光雷達的L4自動駕駛車型
產業鏈起飛!L3級自動駕駛年內有望落地
佑駕創新成功交付L4級自動駕駛小巴項目
佑駕創新L4級自動駕駛小巴成功交付
伊予鐵巴士公司啟動L4級自動駕駛公交商業運營
當春節駕車返鄉擁有了L3/L4級自動駕駛
經緯恒潤全冗余R-EPS助力L4級自動駕駛落地

L4算法公司如何助力城市NOA加速落地?





 工商網監
工商網監

評論