 兩款CAN總線控制器的對比和應用場景分析
兩款CAN總線控制器的對比和應用場景分析
引言
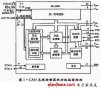
TMS320F2812是TI公司新推出的DSP芯片,內嵌CAN總線控制器eCAN模塊(以下簡稱為eCAN),性能較已有的DSP(如TMS320C24x)內嵌的控制器有很大的提高;數據傳輸更加靈活方便,數據量較大,可靠性更高,功能更加完備。而SJA1000是Philips半導體公司推出的新型獨立CAN控制器,是PCA82C200的替代產品,支持CAN2.0B協議,完全兼容CAN2.0A,是目前應用比較多的CAN獨立控制器之一。
CAN總線系統通信的軟件一般可以分為三個主要模塊:系統初始化模塊、信息發送模塊和信息接收模塊。下面以TMS320F2812內嵌的eCAN模塊與廣州周立功公司的DP51+仿真實驗儀之間的CAN通信為例,主要就eCAN和SJA1000在這三個部分的操作進行比較。
1 eCAN簡介
eCAN同時支持11位和29位的標識碼,是一個32位的控制器。eCAN的有些寄存器(如控制寄存器)必須以32位方式訪問;一些寄存器(如時間標識寄存器)和郵箱所在的RAM范圍可以以8位、16位或32位方式訪問。eCAN對信息的接收和發送是基于郵箱的,共有32個郵箱,占用512字節RAM。每一個郵箱都可以有自己獨立的ID,獨立配置成接收郵箱或者發送郵箱,也可以禁止不用。這樣大大增加了數據的容量和信息的處理能力。
TMS320F2812內嵌的eCAN還有一種SCC模式。它是eCAN的缺省工作模式,功能有所簡化,同樣支持11位和29位的標識碼;但只有16個(0~15)郵箱可用,有些寄存器(如CANTSC)也保留不用,可以通過主控制寄存器(CANMC)中SCB位的置“1”來進入eCAN模式。本文若沒有特別說明指的就是全功能eCAN工作模式。
2 系統初始化
CAN控制器有兩種狀態模式,即工作模式和復位模式(eCAN是初始化配置模式)。不同的狀態模式,對寄存器的訪問操作功能是不同的。無論是eCAN還是SJA1000,在使用之前,也就是進入工作模式之前,必須對它們進行初始化。
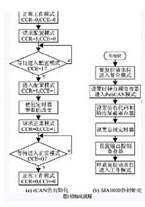
僅當eCAN處于初始化模式下,初始化才能進行。DSP復位后就激活了初始化模式,此時對eCAN進行初始化。首先必須將主控制寄存器的改變配置請求位(CCR)置“1”,且CANES的改變配置使能位(CCE)也必須為“1”時才能正式進入配置模式,就可以對位定時器配置寄存器進行操作了。要返回工作模式,必須將CCE和CCR依次成功清“0”。圖1(a)為eCAN初始化的流程。
將模式寄存器的復位位置“1”,就可以使SJA1000進入復位模式。在復位模式,需要設定時鐘分頻寄存器、總線定時寄存器、報文驗收寄存器、驗收屏蔽寄存器和輸出控制寄存器等。設置好各個寄存器后,就可以將復位位清“0”,進入正常的工作模式。進入復位模式后,需要立即設置時鐘分頻寄存器,將CAN模式位置“1”才能進入PeliCAN模式,否則進入SJA1000的缺省工作模式,即BasicCAN;而其他寄存器的設置則沒有嚴格的次序限制。在這兩種工作模式中,SJA1000寄存器從數量、地址分配到功能等方面是有較大區別的。這里主要討論的是SJA1000的PeliCAN模式。圖1(b)給出了SJA1000初始化的流程。
由圖1可以看出,eCAN的初始化在操作上比SJA1000要復雜一點,需要成功地將CCR和CCE先后置“1”,才能進行配置操作;而SJA1000只需要將復位位置“1”就可以進行初始化操作了。
3 信息發送
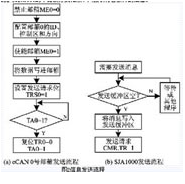
eCAN要發送信息,首先須將某個郵箱配置成發送郵箱,寫郵箱標識符寄存器和報文控制寄存器以及數據。使能該郵箱后,將發送寄存器(CANTRS)相應的位置“1”,eCAN就將該郵箱中的數據發送到總線上。報文控制寄存器中的TPL用來設定消息發送的優先級,數字越大,優先級越高。當多個郵箱需要向總線發送消息時,雖然同時將CANTRS相應的位置“1”,優先級高的郵箱先將消息發送;如果郵箱的優先級相同,則郵箱號數大的,先發送。以0號郵箱為例,其發送消息的流程如圖2 (a)所示。
SJA1000一般可以采用查詢方式來發送信息。不過每一次操作只能向總線上發送1幀信息,而不像eCAN那樣,可以一下子向總線發送多幀消息。當SJA1000的發送緩沖區為空時,CPU就可以將要發送的信息寫入該緩沖區,然后置命令寄存器的發送請求位,即可將消息發送到總線上。發送完畢后,清空發送緩沖區,等待CPU寫入新的信息。SJA1000發送信息時的流程如圖2(b)所示。
對于eCAN,如果郵箱需要發送另一條信息,就需要將郵箱的RAM更新。一般只需要更新數據場,即重新寫MDL和MDH中的內容。更新數據時,須將CANMC中的CDR位置“1”,并在MBNR處寫入需要更新數據的郵箱號,就可以寫入新的數據了。之后,將CDR清“0”,使能該郵箱就可以按正常步驟發送信息了。由此可見,對eCAN發送的信息進行數據更新比SJA1000復雜得多。
4 信息接收
eCAN和SJA1000在接收總線上的信息時,都可以采用查詢方式或者中斷方式。這里僅討論各自的中斷方式。
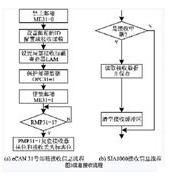
eCAN要接收信息時,相應的郵箱需要配置成接收郵箱并使能,還需要設定信息標識符寄存器(MID)。局部接收屏蔽寄存器(LAM),用來存儲局部接收屏蔽位。覆蓋保護寄存器(CANOPC)相應位,當其為1時,保護相應郵箱里的數據不被新的數據覆蓋,此時還需要另一個郵箱來接收新的后續信息,否則會引起數據丟失;有數據丟失時CANRML相應的位會置1。當eCAN郵箱接收到信息時,就會產生相應的中斷,繼而CPU判斷是哪個郵箱接收到信息,再讀取郵箱里的數據。以31號郵箱為例,eCAN的信息接收的流程如圖3 (a)所示。
SJA1000接收信息時,在接收中斷使能的情況下,當總線上的信息滿足報文驗收的接收條件,無論該信息是數據幀還是遠程幀,都會將信息存放在接收緩沖區,并產生接收中斷。CPU就可以讀取接收緩沖區中的信息并保存,然后可以清空接收緩沖區,等待接收下一條信息。SJA1000的信息接收流程如圖3(b)所示。
SJA1000在PeliCAN模式下有兩種濾波方式:單濾波方式和雙濾波方式。當驗收屏蔽寄存器的某位為1時,驗收代碼寄存器的相應位“不起作用”,即信息標識符相應位無論是“0”還是“1”都會被接收;當驗收屏蔽寄存器的某位是0時,信息標識符相應位與驗收代碼寄存器的相應位必須一致,該信息才被接收。有關這兩種濾波方式的具體內容請參見相關手冊或論文。eCAN的驗收條件比SJA1000相對復雜。當郵箱標識符寄存器中的AME位為0時,LAM將不起到作用,此時只有標識符與郵箱的標識符完全一樣的信息才被郵箱接收或者存儲;當AME為1時,eCAN將使用LAM,此時對信息的接收情況與SJA1000的單濾波方式相似,只接收符合條件的信息。
此外,eCAN與SJA1000在對遠程幀的處理上也有較大的差別。eCAN處理遠程幀時分為兩種情況:向其他節點請求數據和自動應答遠程幀。這兩種情況必須將報文控制寄存器中RTR位置“1”。要向其他節點請求數據,必須將某郵箱配置成接收郵箱,寫入標識符,使能該郵箱,將CANTRS相應的位置“1”,就向總線上發送了一個遠程幀。eCAN會將對方的應答信息存在這個郵箱(這得保證沒有相同ID的其他接收郵箱)。自動應答遠程幀時,郵箱配置成發送郵箱,且郵箱標識符寄存器中的AAM位必須置“1”,寫入需要發送的數據。當該郵箱接收到其他節點發送來的遠程幀時,CANTRS中的相應位自動置位,將報文發送到總線上。而SJA1000接收到1幀信息后,根據RTR位來判斷是否是遠程幀,如果是遠程幀,則根據制定的通信協議對該遠程幀作出相應的回答,不能自動應答遠程幀。
結語
eCAN和SJA1000都是功能十分強大的CAN總線控制器,都有各自的優點,可以應用在不同的場合。雖然它們在CAN總線通信中具體操作上有較大的差別,但其基本思路是一致的。在軟件編程上大致可分為初始化、信息發送和信息接收三個基本模塊,再加上總線睡眠與喚醒處理、總線出錯處理和總線超載處理等功能模塊,就可以構成一個比較完整的CAN總線通信軟件。隨著CAN總線技術的推廣,eCAN和SJA1000都將有不錯的表現。
責任編輯:gt
-
芯片
+關注
關注
455文章
50714瀏覽量
423138 -
控制器
+關注
關注
112文章
16332瀏覽量
177806 -
總線
+關注
關注
10文章
2878瀏覽量
88051
發布評論請先 登錄
相關推薦
一款獨立CAN總線控制器的說明
基于CAN總線的客房通信控制器的設計
基于CAN總線的家庭控制器的設計與實現
基于FPGA的CAN總線控制器的設計
兩款安全地毯控制器的區別






 工商網監
工商網監
評論