") Solver對(duì)電力電子仿真結(jié)果有什么影響?
Solver對(duì)電力電子仿真結(jié)果有什么影響?
電力電子器件開(kāi)關(guān)周期很短,要想精確模擬開(kāi)關(guān)過(guò)程,需要特別小的仿真步長(zhǎng),而小步長(zhǎng)會(huì)導(dǎo)致仿真變慢,仿真速度與精度的權(quán)衡在電力電子仿真中尤為重要。介紹開(kāi)關(guān)器件的幾種不同精度模型,通過(guò)合理的選擇模型精度可以在幫我們從仿真模塊選擇的角度選擇精度和速度。在選定后建模精度后,我們還可以通過(guò)合理的 Solver 設(shè)置進(jìn)一步優(yōu)化仿真速度和精度。介紹到 Simscape Electrical 中有多種精度的 IGBT 模型,Average-value(均值開(kāi)關(guān))、Averaged-switch(均值開(kāi)關(guān))、Piecewise-linear(分段線性)和Nonlinear(非線性)。本文以實(shí)際仿真中應(yīng)用較多的 Piecewise-linear(分段線性)模型為例,介紹 Solver對(duì)電力電子仿真結(jié)果的影響。本文包括如下內(nèi)容:
Solver 介紹
定步長(zhǎng)與變步長(zhǎng)對(duì)電力電子仿真的影響
ode23t 和 odeN 的對(duì)比
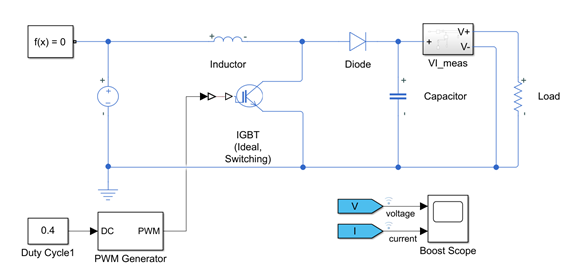
示例概述本文以 Boost 電路為例,下圖是仿真模型截圖,圖中電力電子器件為 IGBT 的分段線性模型。該 Boost 電路通過(guò)控制 IGBT 的開(kāi)關(guān)斷將 250V 的電壓升壓至 400V,模型中沒(méi)有考慮負(fù)載變化,設(shè)置 IGBT 的占空比為 40%。IGBT 的開(kāi)關(guān)頻率為 10kHz,即下圖中 PWM Generator 的 Timer period 設(shè)為 1e-4s。本例中未涉及輸出電壓閉環(huán),僅以開(kāi)環(huán)控制為例介紹 Solver 對(duì)電路的影響。
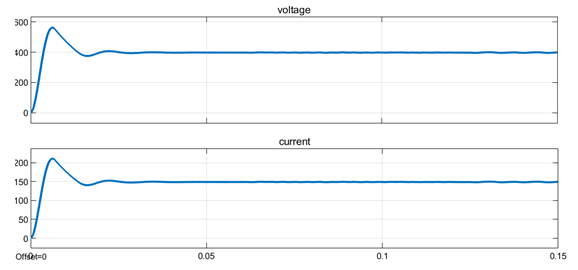
首先我們來(lái)看一下該電路最終的工作效果,下圖中仿真開(kāi)始后電壓迅速上升,最高至 500V,隨后回落穩(wěn)定至約 400V 左右。由于負(fù)載為純阻性負(fù)載,負(fù)載電流與電壓波形相似。
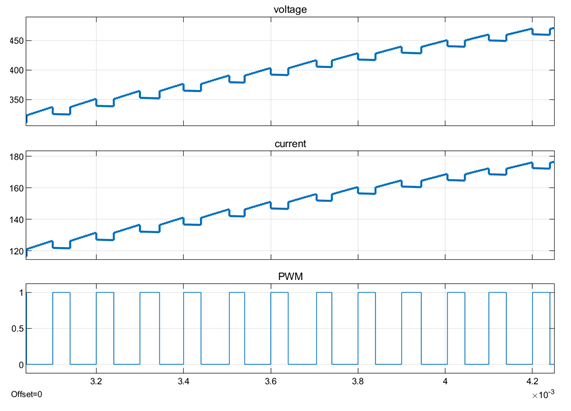
放大上升階段波形,同時(shí)觀測(cè) PWM 信號(hào)。從電壓波形和 PWM 波形的對(duì)比可看出,每次電壓的上升發(fā)生在 PWM 信號(hào)為零時(shí),即 IGBT 關(guān)斷狀態(tài)。Boost 電路的原理是通過(guò) IGBT 的開(kāi)通時(shí)電感蓄能,當(dāng) IGBT 關(guān)斷時(shí)電感電壓與電源電壓疊加為負(fù)載側(cè)供電,從而將輸出端電壓抬高。可見(jiàn) PWM 和 IGBT 的開(kāi)關(guān)斷過(guò)程對(duì)仿真結(jié)果影響至關(guān)重要。
Solver 的種類(lèi)當(dāng)我們使用 Simscape Electrical 進(jìn)行仿真時(shí),有三個(gè) Solver 需要考慮:Simulink Configuration 中的 Simulink Solver、Simscape Solver(圖一中的f(x)=0模塊)和 Powergui。Simulink Solver 決定整個(gè) Simulink 的解算方式,而 Simscape Solver 和 Powergui 分別對(duì)應(yīng) Simscape Electrical 和 Specialized Power Systems 電氣模型的解算方式。當(dāng)然如果 Simscape Solver 中的 ‘Use local solver’沒(méi)有被選擇的話,Simscape Electrical 電氣模型將按 Simulink Solver 設(shè)置進(jìn)行解算。同理當(dāng) Powergui的‘Simulation type’被設(shè)置成 Continuous時(shí),Specialized Power Systems 電氣模型將按 Simulink Solver 設(shè)置進(jìn)行解算。本文采用 Simscape Electrical 進(jìn)行建模,因而只探討 Simulink Solver 和 Simscape Solver。
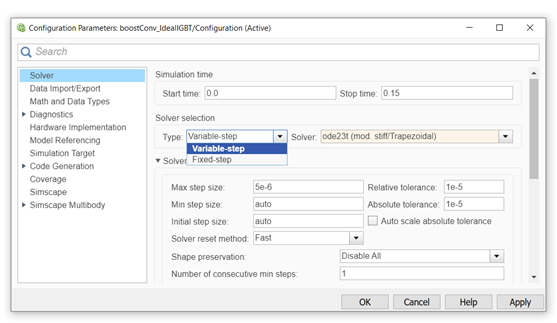
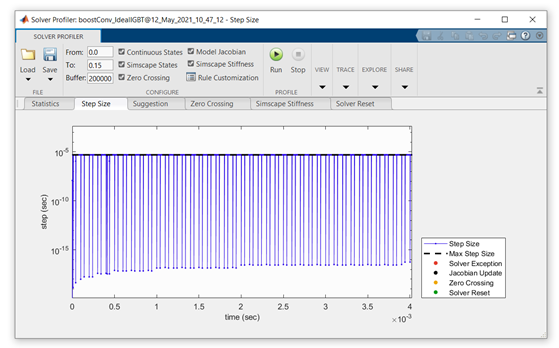
Solver 分變步長(zhǎng)和定步長(zhǎng)兩類(lèi),以下是 Solver 設(shè)置頁(yè)面的截圖。當(dāng)模型被設(shè)置成變步長(zhǎng) Solver,仿真過(guò)程中 Solver 根據(jù)仿真誤差運(yùn)行值自動(dòng)調(diào)節(jié)步長(zhǎng);而定步長(zhǎng)時(shí)Simulink將不判斷誤差,只按設(shè)定步長(zhǎng)運(yùn)行。理論上仿真步長(zhǎng)越小,仿真結(jié)果越精確,但實(shí)際使用過(guò)程中過(guò)小的仿真步長(zhǎng)會(huì)導(dǎo)致仿真緩慢。變步長(zhǎng) Solver 通過(guò)步長(zhǎng)自動(dòng)調(diào)節(jié)方法,實(shí)現(xiàn)速度與精度的平衡。仿真運(yùn)行過(guò)程中當(dāng)系統(tǒng)內(nèi)狀態(tài)變化過(guò)快或過(guò)零點(diǎn)等事件時(shí),Solver 會(huì)自動(dòng)降低步長(zhǎng)來(lái)保證精度;當(dāng)系統(tǒng)內(nèi)狀態(tài)變量變化平緩時(shí),Solver 會(huì)增大步長(zhǎng)以提高仿真速度,保證良好的速度體驗(yàn)。精度的保證 - 變步長(zhǎng) Solver在電力電子仿真中常用的變步長(zhǎng) Solver 是 ode23t,我們將模型設(shè)置成變步長(zhǎng) ode23t 后能保證模型的仿真精確,并且速度體驗(yàn)也還好。通過(guò) Simulink 提供的 Solver profiler 我們可以觀察仿真過(guò)程中步長(zhǎng)的變化,仿真步長(zhǎng)在 5e-5s ~ 10e-20s 之間變化。
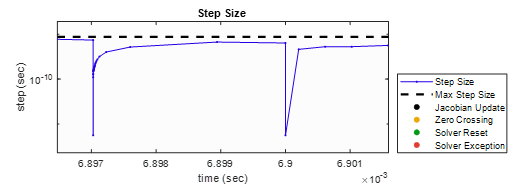
下圖是仿真步長(zhǎng)的放大圖,其中藍(lán)色的點(diǎn)橫線為 Step Size,每個(gè)藍(lán)色點(diǎn)表示該時(shí)刻為計(jì)算時(shí)刻。當(dāng)發(fā)生降步長(zhǎng)時(shí),一段時(shí)間內(nèi)會(huì)有多個(gè)步長(zhǎng)都是以非常小的步長(zhǎng)進(jìn)行計(jì)算的,直至系統(tǒng)平穩(wěn)才恢復(fù)到較大步長(zhǎng)。
如果我們將仿真步長(zhǎng)與電壓、電流和 PWM 信號(hào)對(duì)比,我們將發(fā)現(xiàn)步長(zhǎng)變小的情況通常發(fā)生在 PWM 電平信號(hào)變化的時(shí)刻。
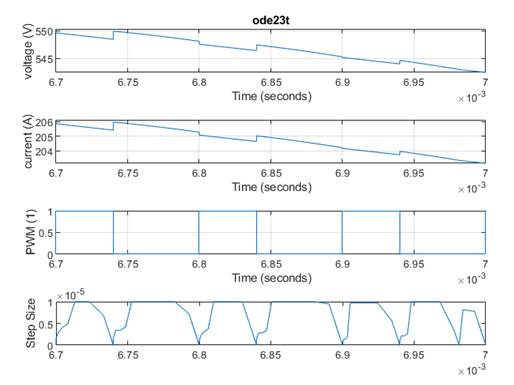
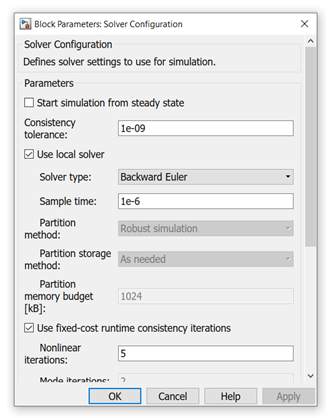
這是因?yàn)?PWM 信號(hào)變化,即 IGBT 的工作模式變化,會(huì)導(dǎo)致整個(gè)系統(tǒng)相關(guān)的狀態(tài)變量發(fā)生較大的改變,同時(shí)會(huì)有過(guò)零點(diǎn)等事件發(fā)生,此時(shí) Solver 需要將步長(zhǎng)減小以保證仿真精度。因而對(duì)于電力電子系統(tǒng),系統(tǒng)中開(kāi)關(guān)變化越多,Solver 減小步長(zhǎng)的可能性越大。隨之而來(lái)的問(wèn)題是,若開(kāi)關(guān)頻率較高或開(kāi)關(guān)器件的較多,仿真會(huì)變得緩慢。如進(jìn)行三相兩電平、三電平或 MMC結(jié)構(gòu)系統(tǒng)仿真時(shí),速度會(huì)逐步下降。速度和精度的權(quán)衡 – 定步長(zhǎng) Solver在實(shí)際項(xiàng)目中,仿真精度的需求會(huì)隨著研究對(duì)象和階段而變化,仿真速度和精度往往是相互矛盾的,他們之間的權(quán)衡需要工程師根據(jù)實(shí)際情況進(jìn)行調(diào)節(jié)。為了解決隨著開(kāi)關(guān)器件增加仿真變慢的問(wèn)題,Simulink Solver 和 Simscape Solver 提供定步長(zhǎng)解決方案。在定步長(zhǎng)模式下,工程師可以根據(jù)經(jīng)驗(yàn)設(shè)置相應(yīng)的步長(zhǎng),以達(dá)到仿真速度和精度的平衡。在使用定步長(zhǎng)進(jìn)行仿真時(shí),建議使能 Simscape Solver 中的 Use local solver 選項(xiàng),這樣在仿真時(shí)電氣模型部分按照針對(duì)物理模型優(yōu)化的定步長(zhǎng)方法進(jìn)行計(jì)算。在該模塊中主要設(shè)置項(xiàng)有 Solver type、Sample time 和 iterations 等設(shè)置,下圖為 Simscape Solver Configuration 設(shè)置頁(yè)面截圖。
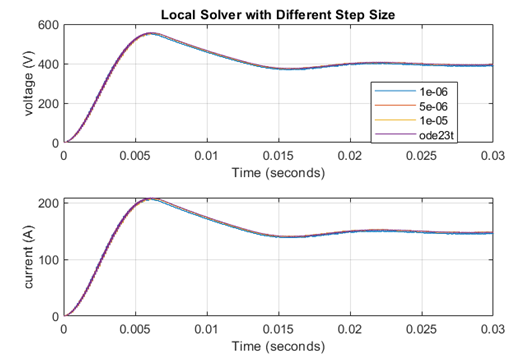
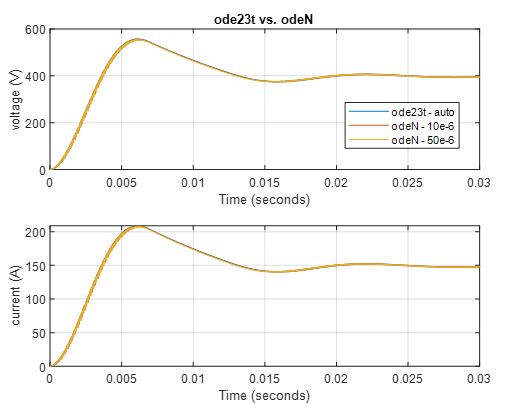
電力電子仿真中 PWM 至關(guān)重要,仿真步長(zhǎng)的設(shè)置以捕獲 PWM 過(guò)程為目標(biāo),如 Boost 電路中我們?cè)O(shè)置的開(kāi)關(guān)頻率為 10kHz,設(shè)置的步長(zhǎng)應(yīng)能很好的捕獲 10kHz 載波與調(diào)制波比較的瞬間,一般經(jīng)驗(yàn)為仿真步長(zhǎng)為開(kāi)關(guān)周期頻率的 1/10~1/100,根據(jù)仿真結(jié)果逼真度需求可適當(dāng)調(diào)節(jié)。使能‘Use local solver’,并使用不同步長(zhǎng)(1us、10us、50us 和 ode23t)進(jìn)行仿真,得到下圖結(jié)果。三種定步長(zhǎng)運(yùn)行的結(jié)果與變步長(zhǎng)結(jié)果的趨勢(shì)一致。
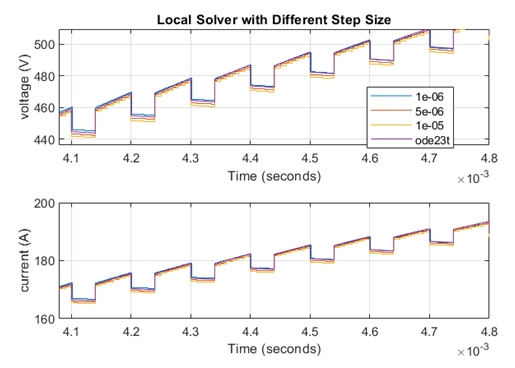
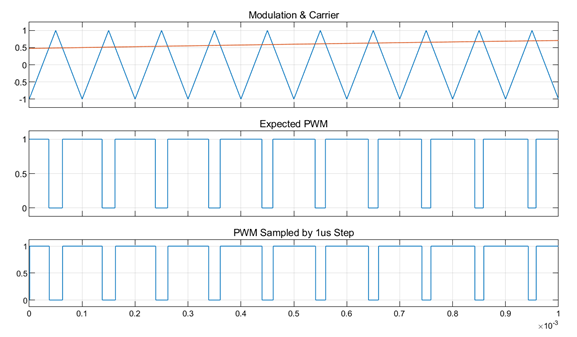
將電壓上升階段的波形進(jìn)行放大,可見(jiàn)下圖。仔細(xì)看幾種步長(zhǎng)呈現(xiàn)的結(jié)果有細(xì)微差別,總的來(lái)說(shuō)步長(zhǎng)越小得到的結(jié)果越接近變步長(zhǎng)結(jié)果。細(xì)微的差別來(lái)源于 PWM 信號(hào)的捕獲精確度,下圖為PWM捕獲過(guò)程的示意圖,第一幅為載波和調(diào)制波信號(hào),第二幅圖為理論 PWM 信號(hào),第三幅圖為 1u s采樣步長(zhǎng)采樣所得的 PWM 信號(hào),由于 1us 步長(zhǎng)相對(duì) 10kHz 開(kāi)關(guān)周期已經(jīng)實(shí)現(xiàn)了 100 倍的采樣,所以大的趨勢(shì)看不出差別。
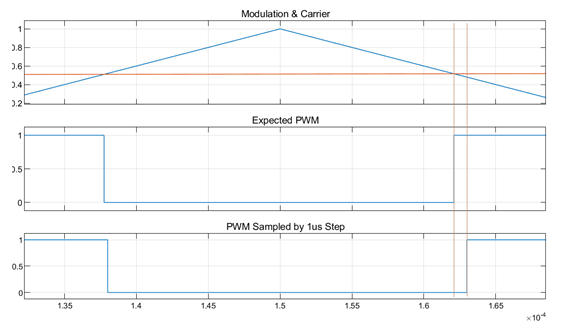
當(dāng)我們對(duì)圖進(jìn)行放大后,可以發(fā)現(xiàn)兩種之間有一定的偏差,定步長(zhǎng)并不能很好的捕獲 PWM 變化的準(zhǔn)確位置,正是這個(gè)偏差導(dǎo)致仿真結(jié)果不一致。當(dāng)采樣步長(zhǎng)增大后仿真偏差也會(huì)越來(lái)越大,直至系統(tǒng)不穩(wěn)定。
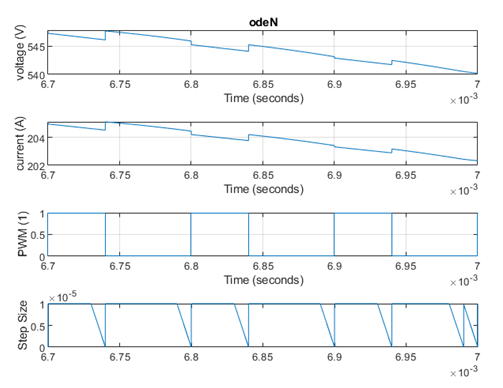
變步長(zhǎng)可以提供很好的精度保證,但在開(kāi)關(guān)器件數(shù)量多時(shí)會(huì)損失速度。通過(guò)合理選擇定步長(zhǎng)模式下的步長(zhǎng),在系統(tǒng)開(kāi)關(guān)器件數(shù)量增多的情況下人能一定程度兼顧速度和精度,但當(dāng)步長(zhǎng)較大時(shí)則會(huì)存在仿真準(zhǔn)確或不收斂的情況。兩種Solver都有相應(yīng)的優(yōu)缺點(diǎn),odeN 集合二者的優(yōu)點(diǎn),提供一個(gè)中間的方法。兼顧定步長(zhǎng)和變步長(zhǎng)的優(yōu)勢(shì) – odeNodeN 在 Simulink Solver 變步長(zhǎng) Solver 選項(xiàng)下,它以定步長(zhǎng)方式運(yùn)行,但當(dāng)系統(tǒng)發(fā)生過(guò)零點(diǎn)時(shí)會(huì)自動(dòng)在過(guò)零點(diǎn)處插入一個(gè)步長(zhǎng),捕獲變化瞬間。這樣我們?cè)诜抡嬷锌梢缘玫焦潭ú介L(zhǎng)的速度優(yōu)勢(shì),同時(shí)能獲得變步長(zhǎng)的精度優(yōu)點(diǎn)。在 ode23t 模式下,仿真步長(zhǎng)始終變化,且在過(guò)零點(diǎn)附近有多個(gè)很小的步長(zhǎng),計(jì)算所需的步數(shù)增加,從而影響仿真速度。將 Solver 由 ode23t 改成 odeN 后系統(tǒng)的仿真步長(zhǎng)變化如下圖所示,在 odeN 的作用下,模型大多數(shù)時(shí)候以設(shè)定的 10us 步長(zhǎng)運(yùn)行,只有當(dāng)發(fā)生過(guò)零點(diǎn)時(shí)才會(huì)降低步長(zhǎng),而且只插入一個(gè)步長(zhǎng)點(diǎn),這樣就可以減少計(jì)算步數(shù),減少仿真時(shí)間。
由于 odeN 具有部分變步長(zhǎng)的特性,在實(shí)際使用時(shí)可以將設(shè)定步長(zhǎng)增大,同時(shí)通過(guò) odeN 自動(dòng)插步的特性保證精度。下圖是 ode23t 和 odeN 在 10us 和 50us 步長(zhǎng)下的對(duì)比,三條曲線沒(méi)有明顯的差異。
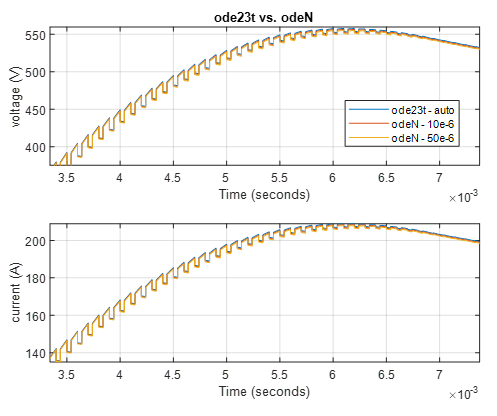
將圖進(jìn)行放大,三者仍然保持較高的重合度,從精度上看可以認(rèn)為 odeN 與 ode23t 在同一水平上。
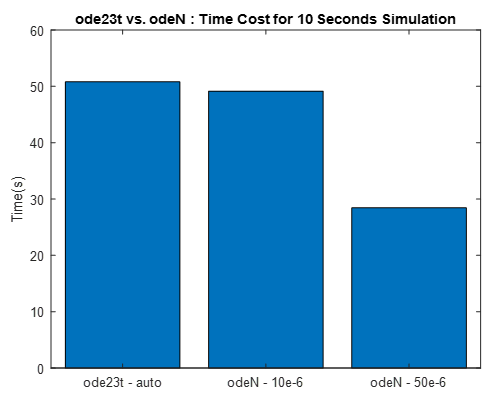
根據(jù) odeN 的工作原理,我們可以推測(cè)在實(shí)際仿真中一定時(shí)間的仿真所需的仿真步數(shù)會(huì)一定程度地減少,步數(shù)的減少?zèng)Q定最終 odeN 在仿真速度上有一定的優(yōu)勢(shì)。下面兩幅圖分別是 Boost 模型仿真 10s 后統(tǒng)計(jì)出的 ode23t 和 odeN 所需的仿真步數(shù)和時(shí)間,從圖中可以得出結(jié)論:odeN 在仿真速度上有一定的優(yōu)勢(shì)。
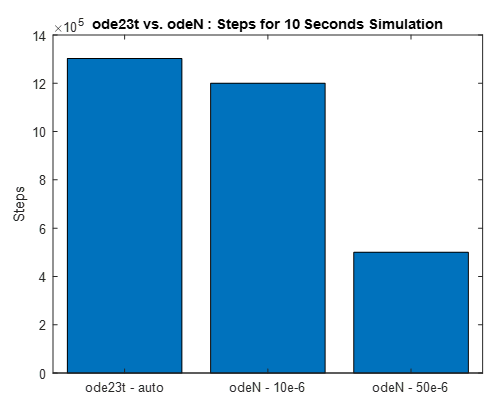
當(dāng)模型設(shè)置為 ode23t 時(shí),模型運(yùn)行時(shí) Solver 自動(dòng)判斷最大步長(zhǎng)約 25us,odeN 在最大仿真步長(zhǎng) 10us 的情況仿真速度已經(jīng)超過(guò)了 ode23t。得益于 odeN 的定步長(zhǎng)特性,可以進(jìn)一步將最大步長(zhǎng)設(shè)成 50us,獲得更快的仿真速度。
通過(guò)以上幾種 Solver 的設(shè)置,Boost 模型的仿真精度得到了保證,且在速度上實(shí)現(xiàn)了較大的優(yōu)化,可見(jiàn) Solver 在仿真中至關(guān)重要。除了以上特性外,Simulink Solver、Simscape Solver 和本文沒(méi)有涉及的 Powergui 中有更多的特性能幫我們做好電力電子仿真。
責(zé)任編輯:lq6
-
IGBT
+關(guān)注
關(guān)注
1271文章
3870瀏覽量
251049 -
電子器件
+關(guān)注
關(guān)注
2文章
596瀏覽量
32295 -
boost電路
+關(guān)注
關(guān)注
3文章
164瀏覽量
30544 -
PWM信號(hào)
+關(guān)注
關(guān)注
3文章
97瀏覽量
20301
原文標(biāo)題:電力電子設(shè)計(jì)之 Solver 設(shè)置
文章出處:【微信號(hào):MATLAB,微信公眾號(hào):MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
電力電子半實(shí)物仿真(HIL)原理及應(yīng)用

電力電子半實(shí)物仿真技術(shù)發(fā)展淺析

醫(yī)療電源,電力電子
Celsius EC Solver:對(duì)電子系統(tǒng)散熱性能進(jìn)行準(zhǔn)確快速分析
傳感器的響應(yīng)時(shí)間對(duì)測(cè)量結(jié)果有何影響?

如何通過(guò)建模與仿真提升電力電子組件的設(shè)計(jì)與性能?

FPGA仿真黑科技\"EasyGo Vs Addon \",助力大規(guī)模電力電子系統(tǒng)仿真
STM32MP135DAE7進(jìn)行編譯測(cè)試,結(jié)果有報(bào)錯(cuò),無(wú)法進(jìn)uboot的原因?
實(shí)戰(zhàn)電力電子,從移相全橋仿真驗(yàn)證起步!
仿真微調(diào):提高電力電子電路的精度

MATLAB電路仿真時(shí)間要考慮那些因素
解決方案丨EasyGo電力電子高校教學(xué)創(chuàng)新實(shí)驗(yàn)系統(tǒng)方案
STM32CubeIDE有沒(méi)有軟件仿真?如果有的話,如何設(shè)置?
演進(jìn)中的電力電子設(shè)計(jì):安森美先進(jìn)仿真工具

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專(zhuān)欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論