 基于EPA和PTS實現串行通信的設計與應用
基于EPA和PTS實現串行通信的設計與應用
目前,在眾多應用領域中,出現了許多所謂“智能儀表”和“智能儀器”,這些系統大多是以單片機為核心的計算機應用系統。在眾多的單片機中,Intel公司的8XC196MC/MD可謂其中的佼佼者。它是16位單片機中功能最強大的單片機之一,幾乎可以勝任各種測控工作,尤其在電機控制中備受青睞。然而由于8X196MC/MD單片機沒有提供硬件的通用異步收發器(UART),這給用慣了UART的用戶帶來了一些不便。但利用專門的PTS模式,不僅可以實現串行通信,而且操作更加靈活,效率更高,CPU的開銷也更小;既可以實現異步(ASIO)功能,也可以實現同步(SSIO)功能;波特率由EPA建立,包括校驗位和停止位在內,收發數據格式可達16位/字符。
1 EPA和PTS概述
1.1 EPA及其工作原理
EPA(Event Processor Array,事件處理器陣列),類似于HSIO,用來處理與時間有關的輸入和輸出事件,但比其更靈活、更高效。在EPA中,主要提供兩類模塊--捕獲/比較模塊和獨立的比較模塊,用于實現捕獲和比較兩種功能。每個模塊都與指定的一個輸入/輸出引腳相關聯,支持其高速輸入輸出功能,所有模塊都能產生中斷。“捕獲”用來捕獲產生于引腳上的跳變事件,包括正跳變、負跳變和正負跳變,并記錄這些事件發生的時刻;“比較”是和預定的時間作比較,時間一到即執行以下選定的輸出功能:復位定時器,啟動一次A/D轉換,為波形發生器產生一個重裝載觸發信號,改變輸出引腳狀態等。
1.2 PTS及其工作原理
PTS(Peripheral Transaction Server,外設事務服務器),是一種特殊的中斷響應方式。與普通中斷響應相比,PTS響應把同一個中斷映射到相應的PTS通道。該通道產生一個PTS周期,它就像DMA周期那樣插入到正常指令流中,不需要額外的軟件開銷,因此其CPU開銷要比一般的中斷響應少得多。PTS有一個PTS向量表,其排列次序和優先級順序與普通中斷向量相同,但去掉了NMI、非法操作碼和軟件陷阱3種中斷。除了NMI之外,所有的PTS通道的優先級高于任何一個普通中斷。每個PTS向量都指向一個PTS控制塊(PTSCB),控制塊說明了應執行的微代碼。它必須駐留在內部RAM空間內,每個控制塊包含8個字節,其首址應能被8除盡。
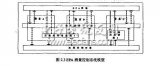
8XC196MC/MD有4種PTS工作方式,要實現串行通信需使用其SIO(串行輸入/輸出)方式。其中SIO有兩種方式:ASIO(異步串行I/O)和SSIO(同步串行I/O)。要工作于某一方式必須建立相應的控制塊(PTSCB)。與SIO方式相對應的控制塊有兩個,如圖1所示。此處只對BAUD和SAMPTIME加以說明。

BAUD(LO和HI):存放控制SIO運行波特率的16位數據。異步方式下,由下式計算:FXTAL/(4×波特率×EPA預置值)。其中:FXTAL為XTAL1腳的輸入頻率,單位為Hz。
SAMPTIME:只用于異步接收多數采樣方式,用來指定采樣時間間隔,由下式計算:FXTAL×Tsam/2-9。其中,Tsam為采樣間隔時間(μs);FXTAL同上,但單位為MHz。
2 利用EPA和PTS實現串行通信
2.1 基本思想
利用EPA和PTS實現串行通信的基本思想是:首先,選擇一個EPA捕獲/比較模塊作為串行通信的接收模塊,選擇一個獨立比較模塊(或選擇一個捕獲/比較模塊而只利用其比較方式)作為串行通信的發送模塊,構成串行通信的硬件端口。然后,對所選的EPA模塊開辟相應的PTS通道,根據通信要求編寫發送和接收PTS模塊。EPA和PTS兩者聯合工作共同實現串行通信。
2.2 應用實例及具體實現
下面以常用的異步串行通信方式為例介紹具體的實現原理和方法。本例用一個EPA捕獲/比較模塊CAPCOMP0產生移位時鐘,P2.O作發送端(TXD),波特率為9 600 bps,8位數據位,無校驗位,1位停止位,用定時器1作時基,16MHz晶振。由于篇幅所限,僅介紹異步串行發送。
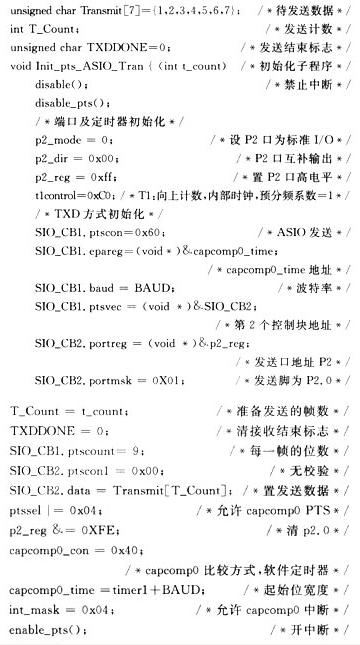
2.2.1 建立并定位控制塊
要利用PTS實現串行通信,必須首先定義相應的控制塊,并將其定位于能被8整除的首地址處;還要將控制塊地址賦給PTS向量。具體實現代碼如下:

2.2.2 發送初始化及PTS中斷子程序
在發送時,要用到EPA中的一個比較模塊,或者使用一個捕獲/比較模塊而使其工作于比較方式下,主要用作發送時產生移位時鐘,以保證指定的位周期。其具體過程如下:首先,在指定的發送引腳上產生一個下降沿(為確保產生下降沿,應先對該引腳置1),并根據指定的波特率對EPA比較模塊的時間寄存器(CAPCOMPx_TIME或COMPx_TIME)置值,以指定發送的位周期。然后,打開中斷和PTS功能,啟動數據發送過程;以后每隔一個位周期便會產生一個PTS周期,在每個PTS周期中,將DATA寄存器中的數據逐位移到指定的發送腳上,直到最后一位移出后,產生一次End_of_PTS中斷,該幀數據發送完畢。每幀數據的位數在控制塊的ptscount中指定。如果需要繼續發送數據,就要在中斷服務程序中對PTSCB、EPA時間寄存器和相應引腳重新初始化,再次啟動發送過程。發送數據保存在transmit數組中,發送幀數,即數據個數由T_Count控制。具體實現代碼如下:

結語
該方法和實例已在實際應用中得到驗證。實踐證明其完全可以滿足串行通信的需要,而且效率更高,更加靈活。
責任編輯:gt
-
cpu
+關注
關注
68文章
10854瀏覽量
211578 -
服務器
+關注
關注
12文章
9123瀏覽量
85324 -
智能儀器
+關注
關注
1文章
54瀏覽量
15074
發布評論請先 登錄
相關推薦
EPASafety——基于EPA的功能安全通信規范
基于EPA通信標準的OPC服務器研究
EPA 通信協議在μC/OS-II嵌入式系統中的設計與實現
PC 機與PLC 串行通信的實現
EPA閥門定位器通信卡設計
DELPHI串行通信編程技術與實現
基于Windows CENET的串行通信的實現
基于AT91R40008芯片和μC/OS-II實現EPA交換機的設計





 工商網監
工商網監
評論