 使用過程仿真函數模擬PID控制的過程
使用過程仿真函數模擬PID控制的過程
練習目的:使用過程仿真函數模擬PID控制的過程,熟悉PID函數的使用和調試。
練習要求:通過對一個過程的控制,實現預整定和精細整定并得到PID參數。
1) 在CPU1511中創建一個循環中斷并設定循環時間為200ms。例如OB31
2) 在OB31中調用PID函數PID_compact,然后在全局庫中打開庫文件《Sim_controllprocess_V13_SP1》,并調用過程仿真函數Sim_PT3,連接PID控制函數與仿真函數的管腳。
3) 在“工藝對象”標簽中選擇對應的工藝對象(PID控制函數的背景數據塊),在“組態”欄中設置PID參數,這里只設置PID的輸入和輸出,其它參數保持缺省設置。最后下載程序和參數配置。
4) 在“調試”界面中進行參數自整定,可以選擇“預調節”方式,整定完成之后如果整定效果滿足工藝要求,可以上傳PID參數到項目中。
5) 如果輸出震蕩,可以再次選擇精細調節模式進行整定。精細整定將在輸出上產生激勵,經過計算后再平滑輸出。
文章出處:【微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
plc
+關注
關注
5010文章
13275瀏覽量
463079 -
西門子
+關注
關注
94文章
3034瀏覽量
115790 -
PID
+關注
關注
35文章
1472瀏覽量
85483
原文標題:西門子S7-1500PLC實現PID控制方法
文章出處:【微信號:xue_PLC,微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
求助,關于ADS1298R使用過程中遇到的疑問求解
我們ADS1298R 這顆物料在使用過程中,經常出現以下問題
1 導聯脫落判斷不了
2心電導聯線連著心電模擬器,確判段為導聯脫落狀態
3呼吸信號出不來
請教一下,這個芯片 判斷導聯線脫落的機制是啥,是通過電阻或者電流?
發表于 11-28 08:26
PID控制中的反饋機制解析
在現代工業自動化和過程控制中,PID控制器是最為常見和有效的控制策略之一。它通過比例(P)、積分(I)和微分(D)三個基本控制作用的組合,實
如何選擇合適的PID控制器
,以實現精確的過程控制。選擇合適的PID控制器不僅能夠提高系統的穩定性和響應速度,還能減少能耗和提高生產效率。 1. 理解PID控制器的基本
PID控制的優缺點分析 PID參數調節的常見方法
控制算法結構簡單,易于理解和實現,不需要復雜的數學模型。 適應性強 :PID控制器能夠適應多種類型的系統,具有較好的魯棒性。 調節方便 :通過調整比例、積分、微分三個參數,可以靈活地調整控制
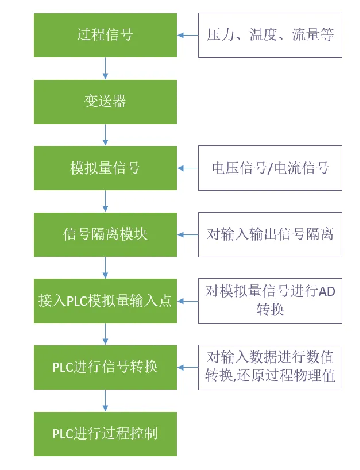
PLC對模擬量信號的處理過程及方法 詳解版
模擬量信號是自動化過程控制系統中最基本的過程信號(壓力、溫度、流量等)輸入形式。系統中的過程信號通過變送器,將這些檢測信號轉換為統一的電壓、電流信號,并將這些信號實時的傳送至
自動控制原理及過程控制方法
自動控制原理及過程控制方法是工程領域中非常重要的一部分,廣泛應用于工業生產、航空航天、交通運輸、醫療設備等多個領域。本文將詳細介紹自動控制原理的基本概念、控制系統的分類、
WXZ196微機消諧裝置使用過程介紹
WXZ196微機消諧裝置使用過程介紹 一、概述 微機消諧裝置是一種用于消除電力系統諧波的設備,廣泛應用于電力、冶金、化工等行業。該裝置主要基于微處理器技術,通過實時監測和調整系統參數,實現對諧波
工業過程控制可配置模擬前端ADC SC1641,可替代SC7793
工業過程控制系統應用多種多樣,范圍覆蓋從簡單的流量控制到復雜的電網,從環境控制系統到煉油廠過程控制。可編程邏輯控制器和分布式
如何用Rust過程宏魔法簡化SQL函數呢?
這是 RisingWave 中一個 SQL 函數的實現。只需短短幾行代碼,通過在 Rust 函數上加一行過程宏,我們就把它包裝成了一個 SQL 函數。
什么是pid控制原理 pid各個參數對系統的影響
PID(Proportional-Integral-Derivative)控制是一種常見的控制算法,廣泛應用于工業過程控制、機器人控制、自動
過程控制中的PID控制技術
在工程實際中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。它以其結構簡單、穩定性好、工作可靠、調整方
PID自動控制回路的振蕩問題與應對方法
在工業自動化控制領域,PID自動控制回路的應用非常廣泛。然而,在使用過程中,我們常常會遇到各種振蕩問題,如同相位振蕩、異相位振蕩和非平滑振蕩等。這些問題不僅會導致裝置的不穩定,還可能影






 工商網監
工商網監
評論